Clear Sky Science · sv
Ett samverkande multi-uppmärksamhetsnätverk för realtidsdetektion av små objekt i UAV-bilder
Varför det är viktigt att upptäcka små detaljer från luften
När drönare blir vanliga verktyg för trafikövervakning, katastrofinsatser och säkerhet måste de pålitligt kunna upptäcka mycket små objekt—som bilar, cyklar eller människor—sedda från hög höjd. I dessa luftbilder är målen bara några pixlar breda och riskerar att försvinna i skuggor, blänk och röriga bakgrunder. Denna artikel presenterar ett nytt datorvisionssystem, kallat Collaborative Multi-Attention Network (CMA-Net), utformat för att snabbt och noggrant detektera sådana små objekt i drönarbilder i tillräcklig takt för realtidsanvändning.
Utmaningar med att se små saker från höjden
Att detektera små objekt i drönarbilder är svårare än i vanliga gatufoton. Eftersom drönare flyger högt och betraktar scener från många vinklar framstår fordon och människor som pyttesmå och suddiga, och ljusförhållanden kan förändras snabbt. Traditionella tvåstegsdetektorer kan vara mycket precisa men är ofta för långsamma för realtid på flygande plattformar med begränsad beräkningskapacitet och kommunikationsbandbredd. Snabbare ettstegsmetoder kör i realtid men tenderar att missa små mål eftersom deras detaljer gradvis suddas ut när bilder bearbetas lager för lager. Författarna menar att bättre detektion av små objekt kräver smartare sätt att kombinera information över skalor och att fokusera beräkningsmässig uppmärksamhet på de mest informativa delarna av en bild.
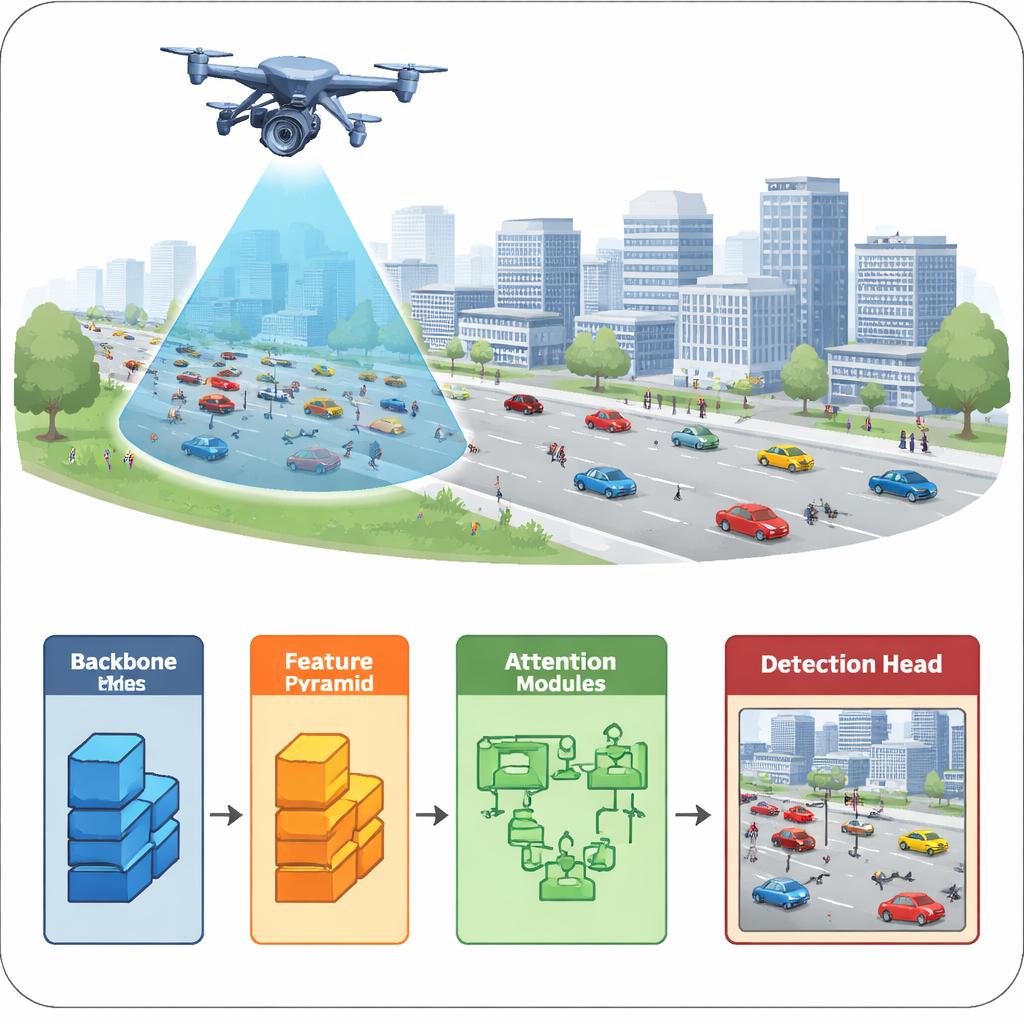
Att bygga en smartare funktionsstege
CMA-Net utgår från en allmänt använd bildbehandlingsryggrad, ResNet-50, och lägger sedan till ett Efficient Bi-directional Feature Pyramid Network (E-BiFPN). Denna struktur bygger en slags stege av feature-mappar i olika storlekar, vilket tillåter systemet att blanda fina detaljer från tidiga lager med mer abstrakt kontext från djupare lager. Till skillnad från tidigare konstruktioner trimmas onödiga högre nivåer i E-BiFPN och ett särskilt lättviktsbearbetningsblock med delvisa konvolutioner läggs till för att minska beräkningen. Ett viktat fusionsschema lär sig sedan hur mycket man ska lita på grunda respektive djupa features på varje skala, så att skör information om pyttesmå bilar eller fotgängare förstärks medan brus från bakgrunden reduceras.
Att lära nätverket var det ska titta
Utöver att omstrukturera features använder CMA-Net uppmärksamhetsmekanismer som efterliknar hur människor fokuserar på relevanta delar av en scen. En Dual-Dimensional Channel Attention (DDCA) modul analyserar features separat längs bildens bredd och höjd, i stället för att komprimera allt till en enda global sammanfattning. Denna design hjälper nätverket att fånga långräckta mönster i både horisontell och vertikal riktning och bevara positionsledtrådar som är avgörande när små objekt smälter in i komplex bakgrund. Parallellt länkar en Multi-Scale Foreground Attention (MSFA) modul stora, lättigenkännliga objekt i djupare lager med mindre objekt i grundare lager. Genom att sampra och föra samman information från tre skalor lär sig MSFA att framhäva förgrundsområden där fordon sannolikt finns och att dämpa förvirrande bakgrundstexturer.
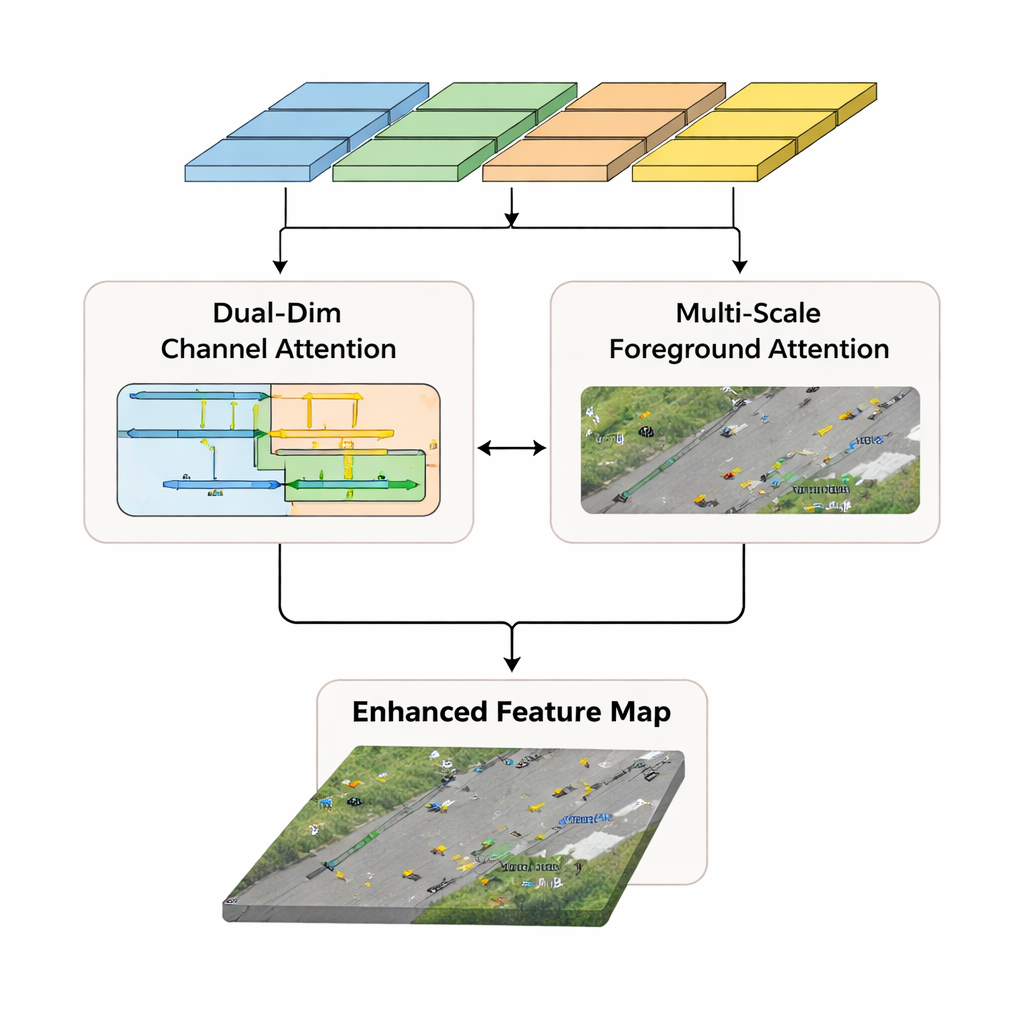
Från förbättrade features till snabba beslut
Utgångarna från DDCA- och MSFA-grenarna slås samman till rika, småobjektsvänliga feature-mappar som skickas till ett "anchor-fritt" detektionshuvud. I stället för att förlita sig på ett tätt rutnät av förinställda boxar predicerar detta huvud direkt både kategori och position för objekt, vilket förenklar beräkningen och gör träningen mer flexibel. Författarna utvärderade CMA-Net på två krävande publika drönardatasets, UAVDT och Stanford Drone, som innehåller trånga vägar, varierande väder och dag–natt-förhållanden. CMA-Net uppnådde noggrannhetssiffror på 67,2 % respektive 62,0 % på dessa dataset samtidigt som den kördes i 64 bilder per sekund, vilket innebär att den kan bearbeta video i realtid och överträffa många populära detektorer, inklusive vissa i YOLO-familjen och mer komplexa transformerbaserade modeller.
Vad detta innebär för drönaranvändning i verkligheten
För icke-specialister är huvudpoängen att CMA-Net avsevärt förbättrar en drönars förmåga att upptäcka små, svårupptäckta objekt utan att sakta ner den. Genom att omsorgsfullt föra samman information över flera skalor och styra nätverkets uppmärksamhet både över bildkanaler och mellan förgrund och bakgrund förhindrar metoden att pyttesmå fordon och människor förbises. Denna kombination av noggrannhet och hastighet gör tillvägagångssättet lovande för praktiska tillämpningar såsom intelligent trafikövervakning, folksamlingars observation och räddningsinsatser, där att missa ett litet objekt eller reagera för långsamt kan få allvarliga konsekvenser.
Citering: Yang, J., Yue, X. & Wu, L. A collaborative multi-attention network for real-time small object detection in UAV imagery. Sci Rep 16, 5852 (2026). https://doi.org/10.1038/s41598-026-36440-2
Nyckelord: drönarvision, detektion av små objekt, realtidsövervakning, uppmärksamhetsnätverk, trafikövervakning