Clear Sky Science · sv
Hierarkiskt NBV-beslutsfattande baserat på mutual information för aktiv semantisk visuell SLAM i dynamiska miljöer
Robotar som kan tänka i förväg
När robotar flyttar ut ur fabriker och in i hem, sjukhus och kontor måste de navigera i miljöer fulla av människor och andra rörliga objekt. Denna artikel presenterar ett nytt sätt för en robot att ”tänka i förväg” om var den ska titta och hur den ska röra sig så att den kan bygga en tillförlitlig karta över sin omgivning—även när den omgivningen vägrar att stå still. Arbetet är viktigt för alla som intresserar sig för säkrare servicero botar, smartare leveransrobotar eller framtida hemasistenter som måste dela utrymme med människor snarare än tomma korridorer.
Varför rörliga människor förvirrar robotar
För att ta sig runt på egen hand använder många robotar en teknik som kallas visuell SLAM, där en kamera hjälper dem att samtidigt bygga en karta och uppskatta sin position. Detta fungerar bra i stilla miljöer men faller snabbt sönder när människor promenerar förbi, blockerar sikten eller bär föremål. En vanlig lösning är att använda ”semantisk” syn så att roboten kan känna igen människor, bilar och stolar och helt enkelt bortse från dem när den bygger kartan. Detta skapar dock ett nytt problem för aktiva robotar som själva väljer sina rutter: om de kastar bort för många visuella ledtrådar kan de tappa bort var de är helt. Kamerans begränsade synfält gör detta ännu svårare, eftersom en enskild person som passerar nära kan dölja det mesta av den användbara omgivningen för robotens ögon.
En tvånivåstrategi för att välja var man ska titta härnäst
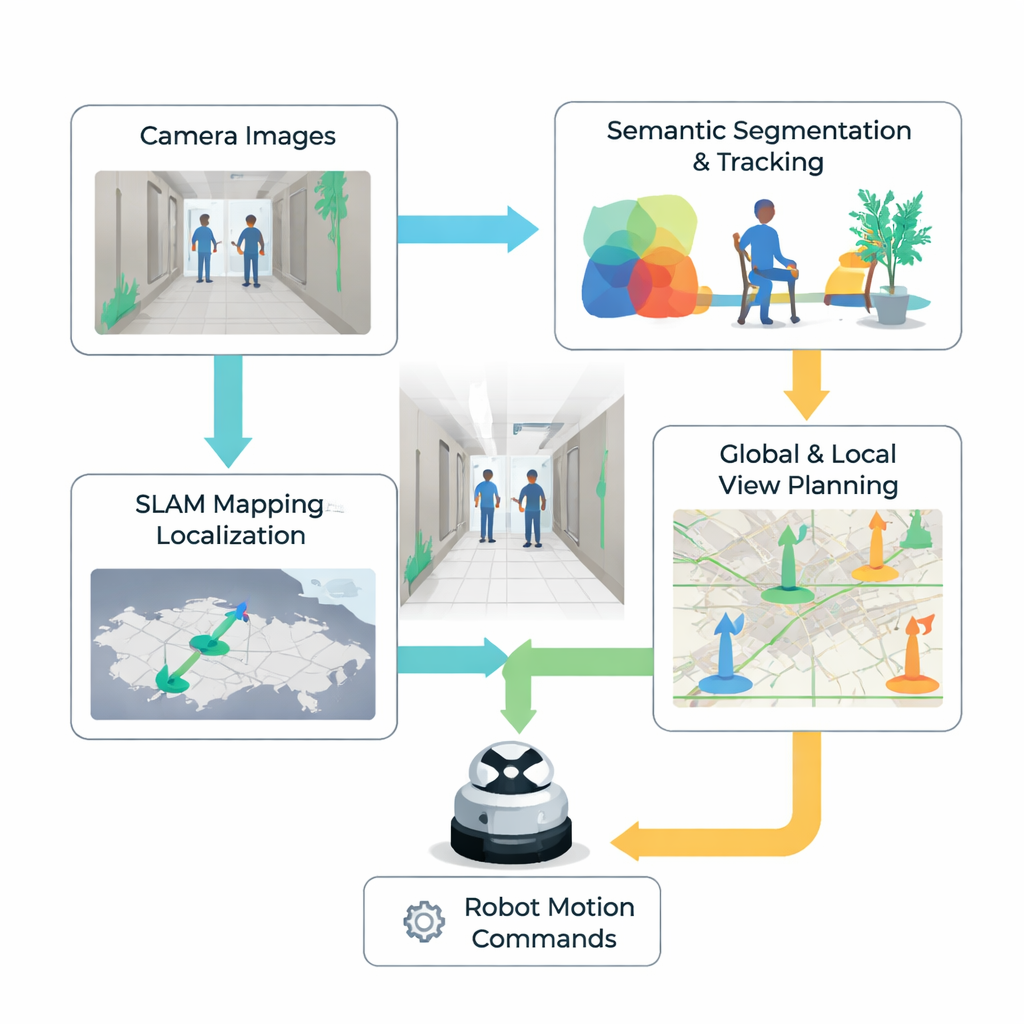
Författarna föreslår ett hierarkiskt beslutsystem som hjälper en robot att välja sina nästa vyer på ett mer informerat sätt. På högre nivå håller roboten en vy-över-grundens rutnätskarta över fria, ockuperade och okända områden. Den utvärderar möjliga avlägsna vyer genom att uppskatta hur mycket var och en skulle minska osäkerheten i denna karta, ett begrepp lånat från informationsteori. Robot föredrar platser som avslöjar stora outforskade regioner samtidigt som den tar hänsyn till hur långt den måste resa och hur mycket den behöver vrida sin kamera. När ett lovande område väl är valt tar en lägre nivå över för att finjustera exakt hur roboten bör röra sig och rikta sig inom det kvarteret så att den faktiskt kan se tillräckligt med användlig detalj med sitt smala kameravy.
Se det som är stabilt och undvika det som inte är det
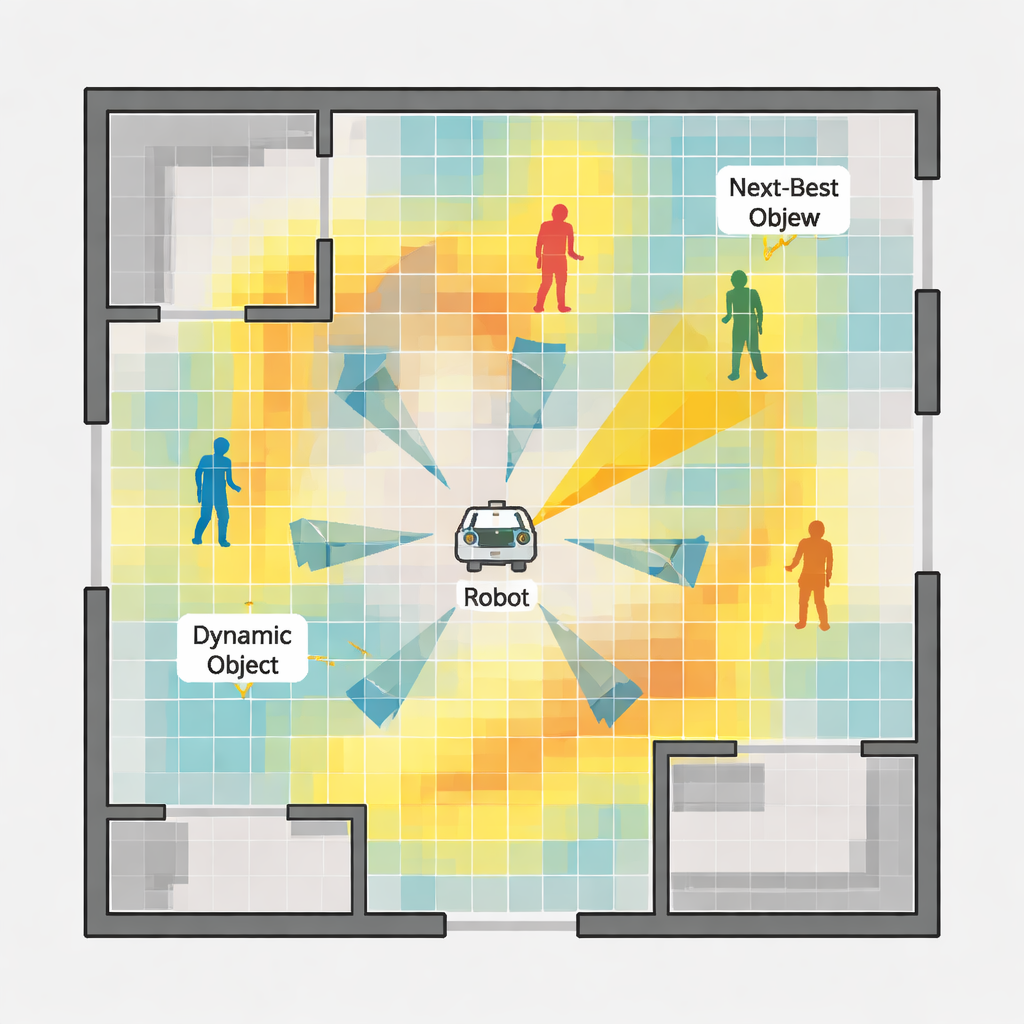
I hjärtat av den lokala beslutsprocessen finns en ”funktionssannolikhetskarta” byggd från varje kamerabild. Först detekterar systemet visuella landmärken—hörn och mönster i scenen—som sannolikt förblir stabila över tid och som är användbara för rörelsespårning. Därefter använder det en modern objektdetektor för att hitta potentiellt rörliga objekt, såsom människor, och spårar dem över bildrutor. Genom att analysera hur dessa objekt rör sig uppskattar systemet inte bara var de är nu, utan var de sannolikt kommer att befinna sig inom en snar framtid. Dessa två informationskällor förenas i en värmekarta över bilden: ljusa regioner indikerar hög sannolikhet att se pålitliga landmärken, medan mörkare regioner markerar platser som antingen saknar funktioner eller sannolikt kommer att täckas av rörliga objekt. Roboten använder denna karta för att bedöma vilken liten rörelse—svänga vänster, höger eller röra sig framåt—som ger den den klaraste och mest stabila vyn härnäst.
Testning i virtuella världar och i verkligheten
Forskarna testade sin metod i två simulerade inomhusutrymmen av olika storlek och komplexitet, vardera befolkade av vandrande virtuella fotgängare, och sedan på en fysisk robot som körde genom en verklig inomhusmiljö. De jämförde sin metod med flera etablerade utforskningsstrategier som främst syftar till att täcka yta eller förkorta restid. I simuleringarna producerade det nya systemet kartor med mindre förvrängning och uppnådde bättre positionsnoggrannhet samtidigt som det utforskade på ungefär samma eller kortare tid. Det var också mindre benäget att tappa bort sin position eller komma obekvämt nära rörliga människor. I realvärldsexperimentet körde metoden i realtid på en standard robotdator, vilket bekräftar att den är praktisk för användning utanför labbet.
Vad detta betyder för vardagsrobotar
Enkelt uttryckt lär detta arbete en robot att vara kräsen med var den tittar och vart den går när människor finns i närheten. Genom att kombinera scenförståelse, rörelseprognos och en mätning av informationsvinsten kan roboten styra sig mot vyer som både är informativa och säkra, snarare än att bara marschera mot det närmaste outforskade hörnet. Det gör dess interna karta mer pålitlig och dess rörelser mer förutsägbara—vilket är viktiga ingredienser för robotar som måste dela trånga utrymmen med människor. Vissa utmaningar återstår—såsom plötsliga stora folkmassor som blockerar kameran—men tillvägagångssättet markerar ett steg mot hemoch servicero botar som snyggt kan hantera den röriga, dynamiska verkligheten.
Citering: Yang, Z., Sang, A.W.Y., Muthugala, M.A.V.J. et al. Mutual information-based hierarchical NBV decision for active semantic visual SLAM under dynamic environments. Sci Rep 16, 5847 (2026). https://doi.org/10.1038/s41598-026-36259-x
Nyckelord: aktiv SLAM, robotnavigation, dynamiska miljöer, semantisk kartläggning, nästa bästa vy