Clear Sky Science · sv
Cross-stage edge information fusion network för detektion av små objekt i flygbilder
Varför det är viktigt att upptäcka små detaljer från luften
Från trafikövervakning och katastrofinsatser till grödhantering, övervakas allt fler delar av vår värld från ovan med drönare. Många av de saker vi bryr oss mest om i dessa flygbilder—människor, bilar eller djur—framträder dock som bara några pixlar. Denna artikel presenterar ett nytt datorsynsystem, CEIFNet, särskilt utformat för att hitta dessa små objekt mer träffsäkert och snabbare, även när de omges av röriga stadsmiljöer, fält eller nattliga störningar.
Att se små ting i en stor bild
Standardmetoder för objektdetektering är i grunden utvecklade för marknära foton, där en bil eller en person ofta fyller en påtaglig del av bilden. I drönarbilder kan kameran dock vara hundratals meter upp, så varje mål är mycket litet och lätt suddas ut eller försvinner när bilden skalas ner i ett neuralt nätverk. Författarna förklarar att populära enkelskottsdetektorer, som YOLO-familjen, fungerar väl i vardagsscener men har svårt när objekten både är pyttesmå och mycket varierande i storlek. Upprepade nedsamplingssteg, avsedda att förstå hela scenen, tenderar att radera de svaga signalerna från dessa små mål.
Att blanda närbildsseende med helhetskontext
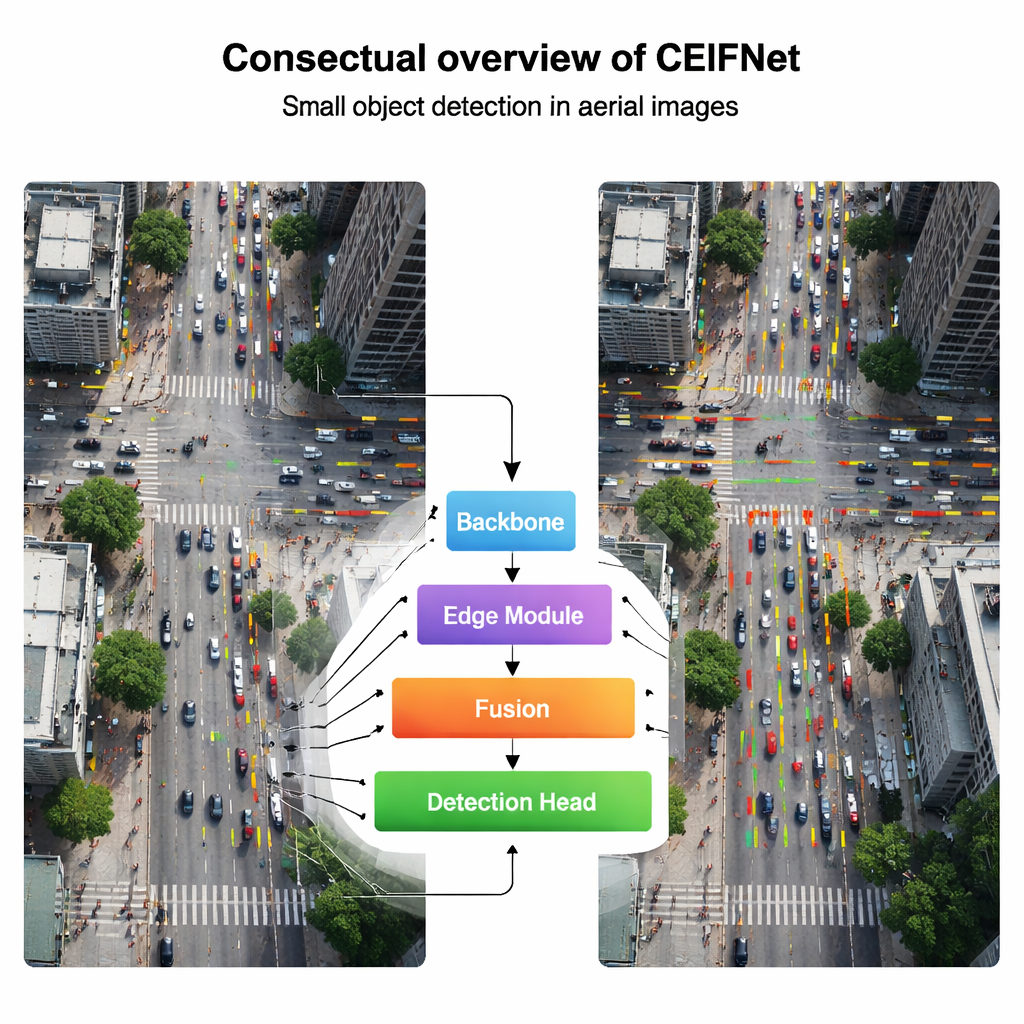
För att hantera detta kombinerar CEIFNet två kompletterande sätt att se. Den ena vägen använder klassiska konvolutionsfilter, som fångar skarpa lokala mönster som hörn och texturer. Den andra vägen använder en transformer-liknande attention-mekanism, som är bra på att relatera avlägsna delar av bilden och förstå scenen som helhet. Inuti byggstenen, den så kallade cross-stage transformer-blocket, delas inkommande bildfunktioner: majoriteten av kanalerna går genom en lättvikts konvolutionsväg, medan en mindre del passerar en attention-väg som resonerar om långdistansrelationer. Dessa kombineras sedan igen, vilket ger nätverket både fina detaljer och global medvetenhet utan att kostnaden i beräkningstid exploderar.
Att använda kanter som karta för små mål
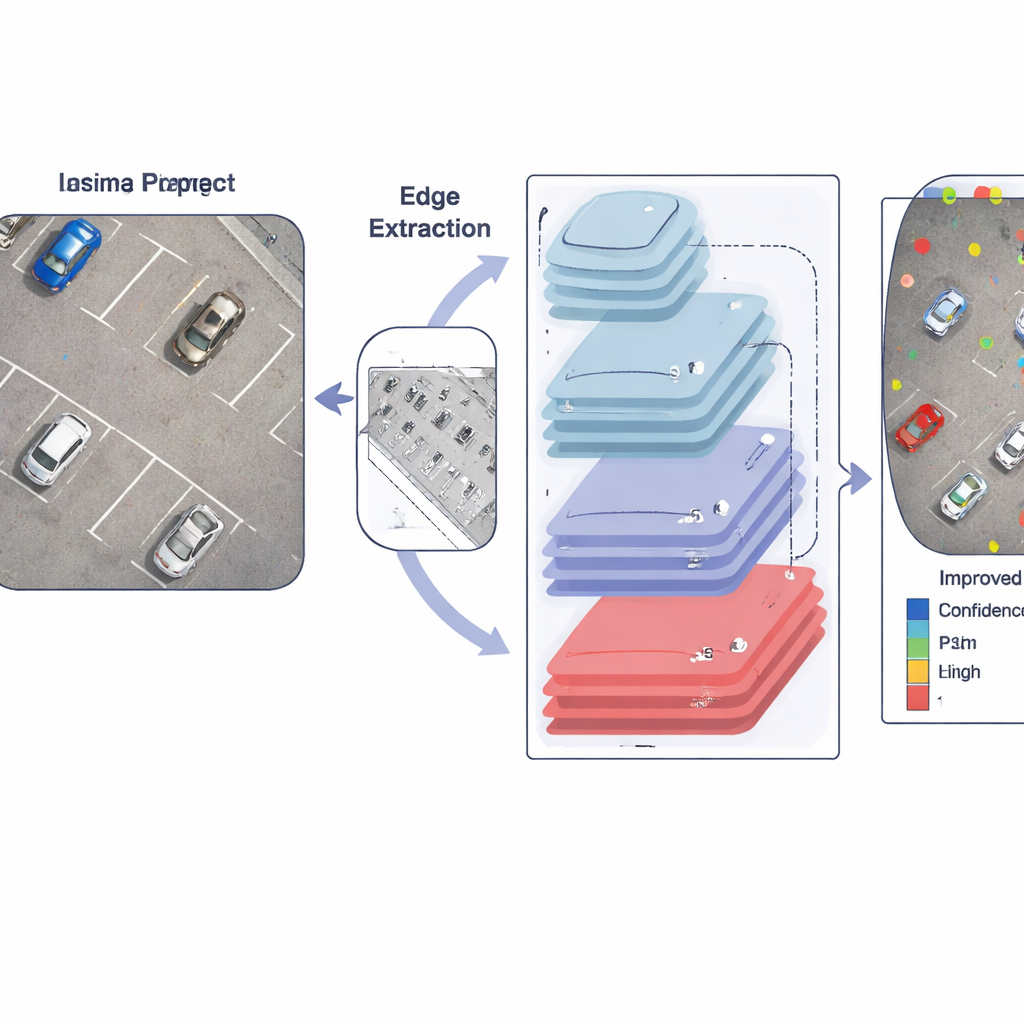
En central insikt i artikeln är att objektgränser—kanter—är särskilt värdefulla när målen bara är några pixlar breda. Istället för att enbart förlita sig på inlärda filter injicerar författarna medvetet kantinformation i nätverket. En dedikerad modul applicerar först en Sobel-operator, en enkel men robust kantdetektor, för att framhäva var ljushetsförändringar är skarpa, till exempel runt konturerna av bilar eller människor. Dessa kantkartor poolas sedan i flera storlekar för att matcha olika funktionsskalor och fusioneras genom en tvärkanalsmodul. När bilden flödar djupare in i nätverket matas dessa förtydligade kantspår upprepade gånger in i senare lager, vilket hjälper modellen att hålla reda på var små objekt börjar och slutar trots den vanliga utjämningen och nedskalningen.
Anpassning till storlek, position och scenkomplexitet
I utgången använder CEIFNet ett dynamiskt detektionshuvud som kan justera sitt beteende beroende på vad det ser. Istället för fasta filter tillämpar detta sista skede tre former av attention samtidigt: det kan favorisera vissa objektstorlekar, fokusera på de mest lovande platserna i bilden och betona de mest informativa funktionskanalerna. Tillsammans med en feature-pyramidstruktur som bevarar ett extra fint granskikt gör detta systemet mer lyhört för små, tätt packade mål i realistiska drönarsekvenser, från trånga korsningar till fulla parkeringsplatser och termiska infraröda nattscener.
Att påvisa förbättringar i verkliga drönarscenarier
Forskarna testade CEIFNet på två krävande drönardatamängder: VisDrone2019, bestående av dagsljusa urbana och förortslandskap, och HIT-UAV, en termisk infraröd samling där många mål är svaga och små. På båda presterade det nya systemet bättre än en stark YOLO-baserad referens och en rad andra moderna detektorer när det gäller att upptäcka objekt, samtidigt som det fortfarande kördes tillräckligt snabbt för realtidsbruk på ett kraftfullt grafikkort. Noggranna ablationsexperiment visade att varje komponent—hybridblocket, kantmodulen, det extra fina lagret och det dynamiska huvudet—bidrog till den totala förbättringen.
Vad detta innebär för vardagsteknik
För icke-specialister är slutsatsen att CEIFNet erbjuder ett smartare sätt för drönare att "märka de små ting" i stora, komplexa scener. Genom att bevara kantinformation, blanda lokala detaljer med global kontext och anpassa sin attention dynamiskt kan nätverket upptäcka små objekt som andra system missar eller felplacerar. Det gör flygövervakning mer tillförlitlig för uppgifter som trafiksäkerhet, sök- och räddningsinsatser och precisionsjordbruk, och pekar mot framtida system som kan utvinna tillförlitlig information från allt högre och bredare vyer av vår värld.
Citering: Xiao, J., Li, C., Chen, H. et al. Cross-stage edge information fusion network for small object detection in aerial images. Sci Rep 16, 7639 (2026). https://doi.org/10.1038/s41598-026-36251-5
Nyckelord: detektion av objekt i luften, små objekt, drönaravbildning, kantbaserad vision, djupt lärande