Clear Sky Science · sv
Förstärkningsinlärningsdriven modellprediktiv reglering för optimering av kontra-roterande synkronlikströmsmotor med permanentmagneter i ubåtsdrivsystem
Smartare motorer för tystare ubåtar
Moderna ubåtar är beroende av tyst och effektiv framdrivning för att utforska haven och genomföra vetenskapliga, kommersiella eller militära uppdrag. Denna studie granskar en speciell typ av elmotor som driver två propellrar i motsatta riktningar, vilket hjälper en ubåt att röra sig smidigt och tyst genom vattnet. Forskarna visar hur en kombination av avancerade prediktionsverktyg och en inlärningsalgoritm kan hålla dessa motorer stabila och effektiva, även när vågor, strömmar och plötsliga manövrar stör dem.
Två propellrar, en stabil ubåt
Traditionella enkelpropeller-system kan orsaka att en ubåt vrider sig och rullar, särskilt i högre hastigheter, vilket gör den svårare att styra och lättare att upptäcka. För att undvika detta använder ingenjörer kontra-roterande propellersystem: två propellrar monterade på samma axel men som snurrar i motsatta riktningar. I centrum för denna lösning finns den kontra-roterande synkronlikströmsmotorn med permanentmagneter (CRPMSM), i praktiken två kompakta, högtorkarande elmotorer staplade ihop. Denna uppställning tar bort oönskade vridkrafter, förbättrar energieffektiviteten och minskar buller — allt avgörande för stealth och långa uppdrag under ytan. När lasten på de två rotorerna blir obalanserad, till exempel i turbulens eller vid skarpa svängar, blir det emellertid en allvarlig regleringsutmaning att hålla båda sidorna i perfekt harmoni. 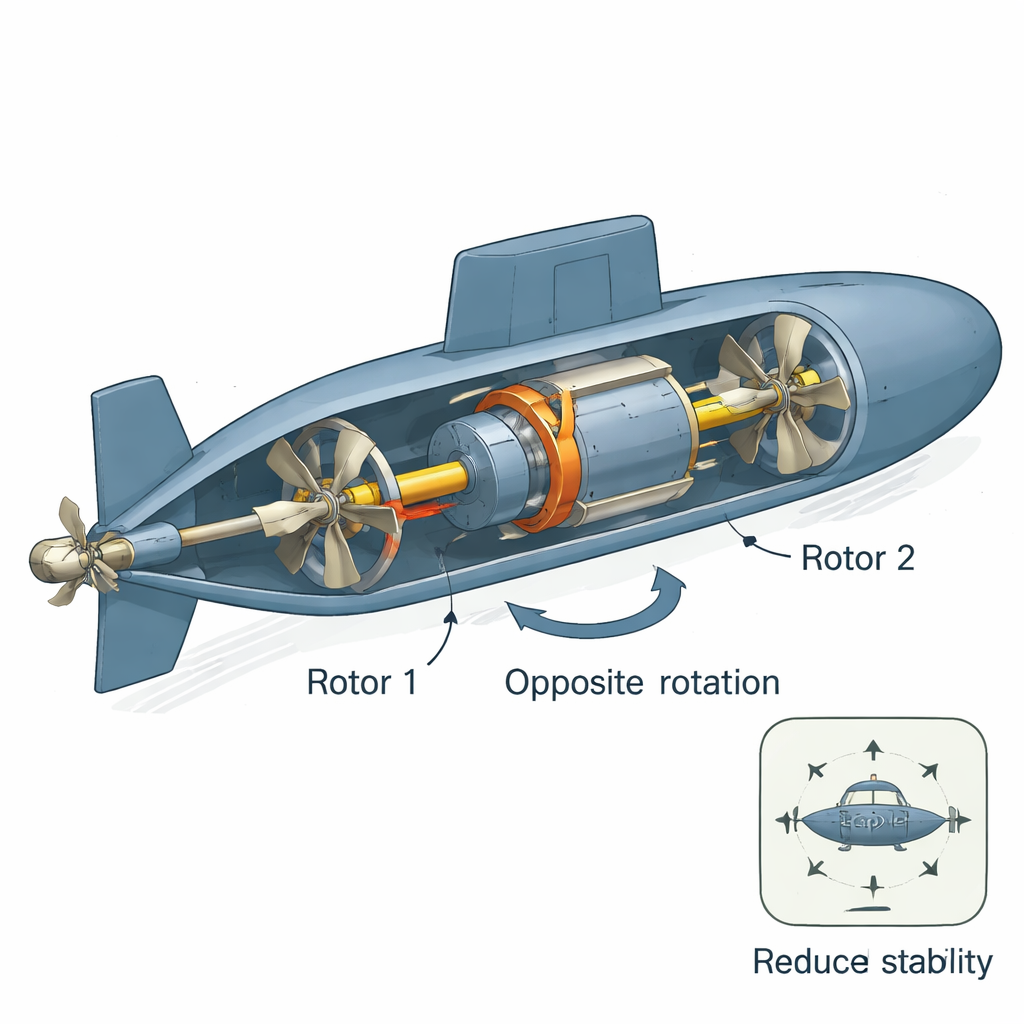
Varför konventionell styrning inte räcker
Ingenjörer har prövat många styrstrategier för att hålla CRPMSM-rotorer synkroniserade och effektiva. Metoder som fältorienterad styrning och direkt vridmomentstyrning kan fungera väl under lugna, förutsägbara förhållanden, men de får problem när undervattensmiljön förändras snabbt eller blir mycket ojämn. Mer sofistikerade tekniker såsom sliding-mode, fuzzy och adaptiv styrning ökar robustheten, men de förlitar sig ofta på mycket precisa matematiska modeller av motorn och det omgivande vattnet. I praktiken är dessa modeller aldrig perfekta, och avvikelser kan leda till ökad vridripplighet, långsammare återhämtning efter störningar och onödigt energislöseri. Modellprediktiv styrning (MPC), som planerar optimala styråtgärder över ett kort framtidsfönster, erbjuder snabb respons men är fortfarande starkt beroende av kvaliteten på den underliggande modellen.
En hybridstyrenhet som lär sig under drift
Författarna föreslår ett hybridramverk: förstärkningsinlärningsdriven modellprediktiv styrning (RL-MPC) som kombinerar styrkorna hos båda angreppssätten. MPC använder en matematisk modell av CRPMSM för att förutsäga hur strömmar, vridmoment och hastighet kommer att utvecklas över de nästa styrstegen och väljer spänningskommandon som ska följa önskade hastighets- och strömmål samtidigt som begränsningar respekteras. Ovanpå detta observerar en förstärkningsinlärningsagent, baserad på Twin Delayed Deep Deterministic Policy Gradient (TD3)-algoritmen, hur den verkliga motorn beter sig. Genom att få belöningar när hastighetsfel, strömfel och styrinsats är små justerar inlärningsagenten gradvis MPC:s utgångar för att kompensera modellfel, obalanserade laster och externa störningar. En space-vector-pulse-width-modulering (SV-PWM)-etapp konverterar sedan dessa optimerade spänningskommandon till växlingssignaler för omriktaren som driver motorn.
Test av den smarta motorn
För att utvärdera metoden byggde forskarna en detaljerad simulering av ett 120 kW kontra-roterande motorsystem i MATLAB/Simulink och testade det i tre realistiska driftfall. I det första körde motorn med konstant hastighet medan lasten på båda rotorerna ändrades men förblev balanserad; i det andra varierades hastigheten under konstant last; i det tredje, det mest krävande fallet, utsattes rotorerna för olika laster medan hastighetsreferensen var fixerad. I samtliga fall jämfördes RL-MPC direkt med konventionell MPC med samma prediktions- och styrhorisonter. 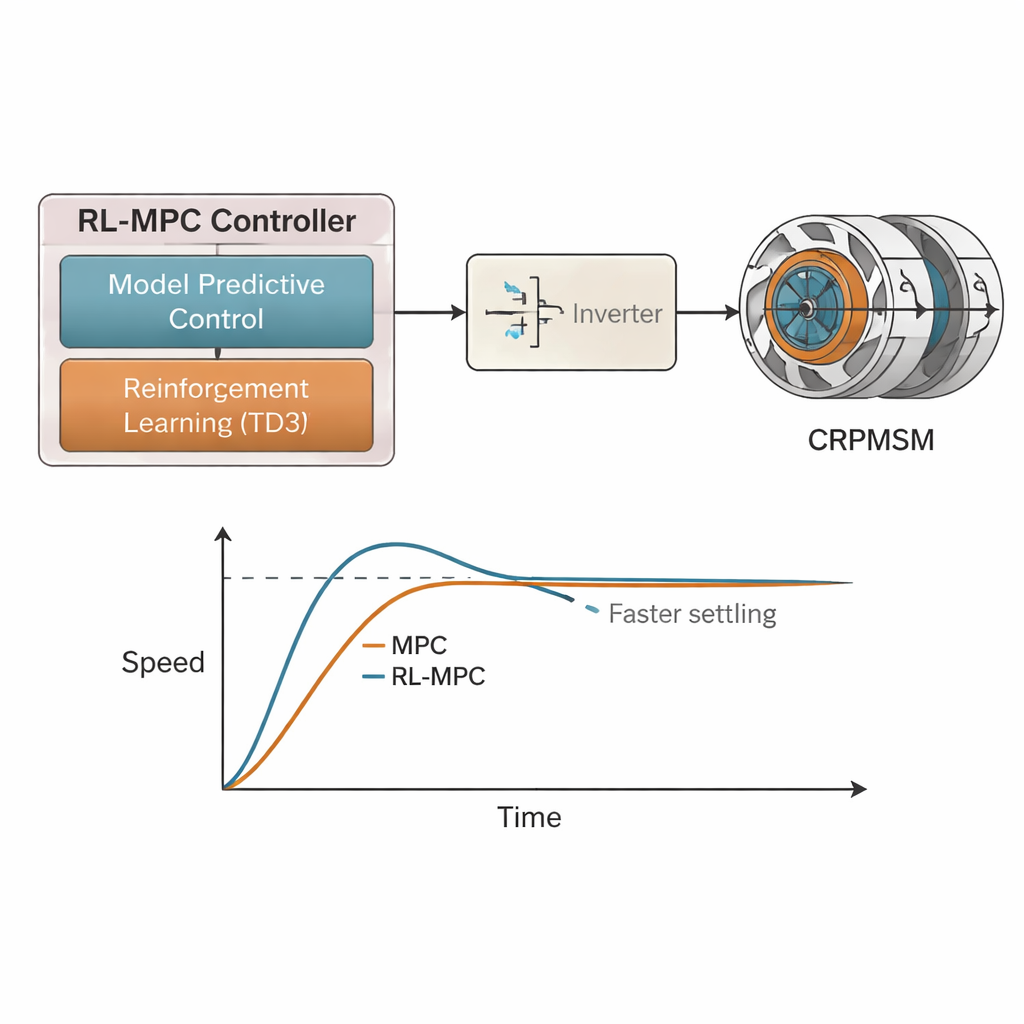
Snabbare respons, renare strömmar, bättre synkronisering
Den hybridbaserade RL-MPC-regulatorn överträffade konsekvent standard-MPC i alla tester. När laster eller hastigheter förändrades plötsligt minskade RL-MPC överskjutningen i hastighet från cirka 30 % till omkring 15–16,6 % och halverade insättningstiden från ungefär 1,4 sekunder till 0,7 sekunder. Vridharmoniska blev mindre och de två kontra-roterande rotorerna hölls nära synkroniserade, även när en rotor var mer belastad än den andra. Lika viktigt förbättrades kvaliteten på statorsströmmarna markant: total harmonisk distorsion föll med mer än 60 % under kraftiga obalanserade lasttransienter, från 9,3 % för MPC till 3,4 % för RL-MPC, och till så lågt som cirka 2–3 % i steady state. Renare strömmar innebär mindre uppvärmning, tystare drift och högre total verkningsgrad.
Vad detta betyder för framtida undervattensfarkoster
För icke-specialisten är huvudbudskapet att lägga ett lärande lager ovanpå en prediktiv reglerare gör ubåtsmotorer både smartare och tåligare. I stället för att enbart förlita sig på fasta ekvationer som kan svika när havet blir grovt eller farkosten manövrerar kraftigt kan RL-MPC-ramverket anpassa sig i realtid och hålla dubbelrotormotorn synkroniserad, responsiv och effektiv. Resultaten hittills bygger visserligen på simuleringar och behöver verifieras i verklig hårdvara och i verkliga hav, men arbetet pekar mot framtida undervattensfarkoster som färdas längre på samma energimängd, låter mindre och förblir stabila och lätthanterliga i utmanande förhållanden.
Citering: Delelew, E.Y., Dulecha, K.A., Ararso, Z.T. et al. Reinforcement learning-driven model predictive control for optimizing counter-rotating permanent magnet synchronous motor in submarine propulsion system. Sci Rep 16, 5277 (2026). https://doi.org/10.1038/s41598-026-36126-9
Nyckelord: ubåtsdrivning, kontra-roterande motor, förstärkningsinlärningsstyrning, modellprediktiv styrning, undervattensfarkoster