Clear Sky Science · sv
En algoritm för gemensam estimering av räckvidd–vinkel–hastighet för FDA-MIMO-radar baserad på graf-signalbehandling
Smartare radar för en tätbefolkad, brusig värld
Från självkörande fordon till flygövervakning förlitar sig det moderna samhället i stor utsträckning på radarsystem som snabbt och tillförlitligt kan hitta och spåra objekt. När himlar, vägar och frekvensband blir allt mer trånga måste radarn kunna särskilja flera rörliga mål i närvaro av stark störning och brus. Den här artikeln presenterar ett nytt sätt att få en kraftfull radar-klass — kallad FDA-MIMO — att se klarare i tre dimensioner (avstånd, riktning och hastighet) genom att låna verktyg från ett framväxande fält känt som graf-signalbehandling.
Varför denna nya radararkitektur spelar roll
Traditionella fasstyrda antennarrayer riktar sina strålar främst över vinkel, ungefär som att vrida en ficklampa åt vänster och höger. Frequency Diverse Array (FDA)-radar fungerar annorlunda: varje antennelement sänder på en något annorlunda frekvens. Den lilla skillnaden gör att strålformen inte bara beror på vinkel utan även på avstånd och tid. I kombination med multiple-input multiple-output (MIMO)-tekniker kan FDA-MIMO-radar i princip bestämma var ett mål finns i tre dimensioner: hur långt bort det är, var det ligger i vinkel och hur snabbt det rör sig. Utmaningen är att snabbt och noggrant extrahera all den informationen ur de råa ekona, särskilt när det finns många mål och signalerna är dolda i brus.
Att göra radarens ekon till ett nätverksproblem
Författarna angriper denna utmaning genom att återföreställa radarens mätningar som signaler som lever på en graf — ett nätverk av noder och länkar. Varje nod i denna graf representerar ett särskilt sändar–mottagarpar i FDA-MIMO-arrayen, och länkarna fångar hur signalerna vid närliggande noder är relaterade i rummet. Genom att noggrant definiera dessa kopplingar bygger de en "adjacensmatris" som beskriver hur ekon ska propagera över arrayen om ett mål befinner sig på ett givet avstånd och i en viss vinkel. När det antagna avstånd–vinkelparet stämmer överens med det verkliga målet, överensstämmer det uppmätta ekomönstret nästan perfekt med ett av grafens naturliga vibrationssätt. I praktiken innebär detta att, efter en grafbaserad variant av Fouriertransformen, kollapsar energin till en mycket skarp topp i en enskild spektralkomponent. Algoritmen söker efter sådana toppar över ett rutnät av avstånds- och vinkelvärden för att hitta var målen är belägna. 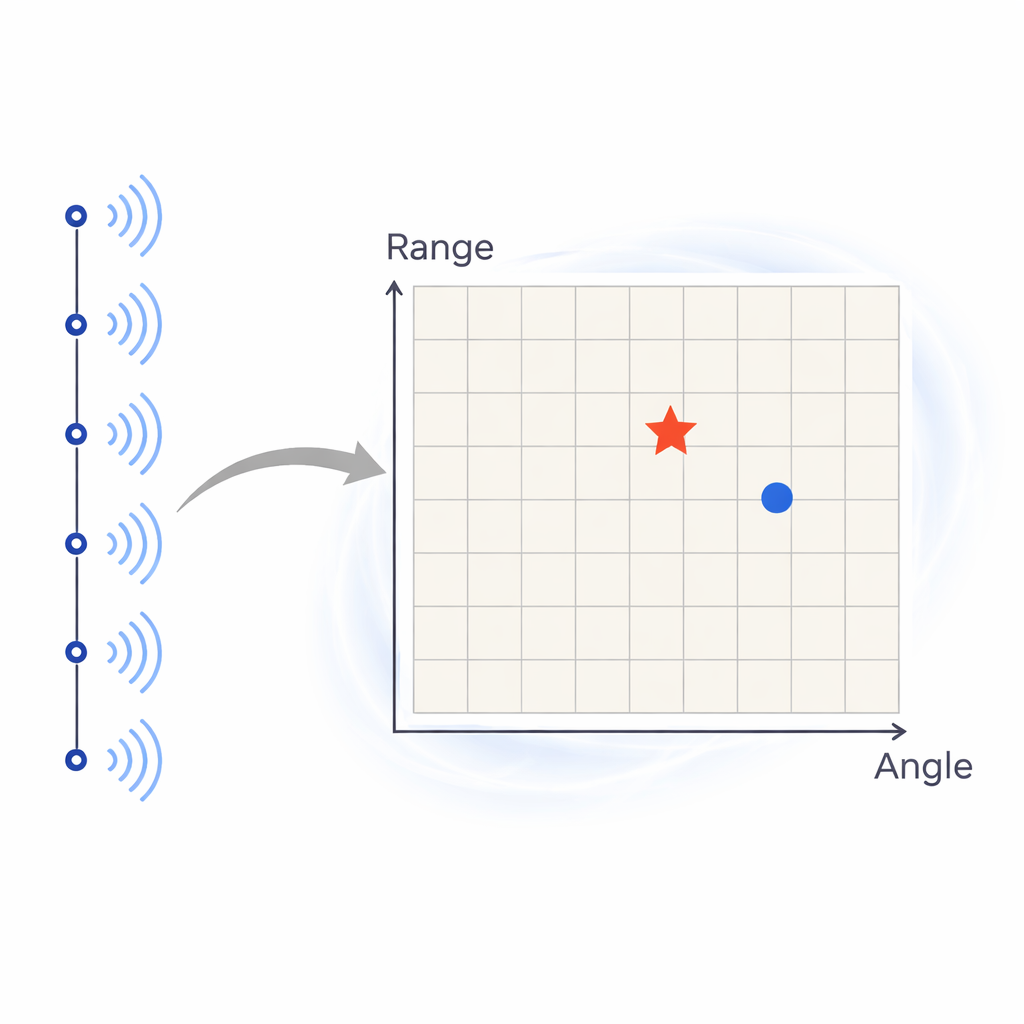
Lägga till rörelse: mäta hastighet med samma idé
För att uppskatta hur snabbt ett mål rör sig förlänger metoden grafkonceptet till tidsdimensionen, över flera radarpulser. Nu representerar varje nod en puls i tiden, och länkarna förbinder intilliggande pulser i en slinga för att fånga hur signalen bör utvecklas om målet har en viss radiell hastighet. Återigen, när den antagna hastigheten matchar den verkliga hastigheten visar den transformerade signalen en koncentrerad topp i grafens spektrala domän. Algoritmen skannar genom kandidat-hastigheter och letar efter där denna topp är som starkast. Avgörande är att författarna utformar sitt ramverk så att avstånd–vinkel-estimaten från den spatiala grafen och hastighetsestimaten från den temporala grafen förstärker varandra. Data från alla antenner och alla pulser kombineras och bildar en flerdimensionell struktur som förbättrar noggrannheten utan att duplicera arbete. 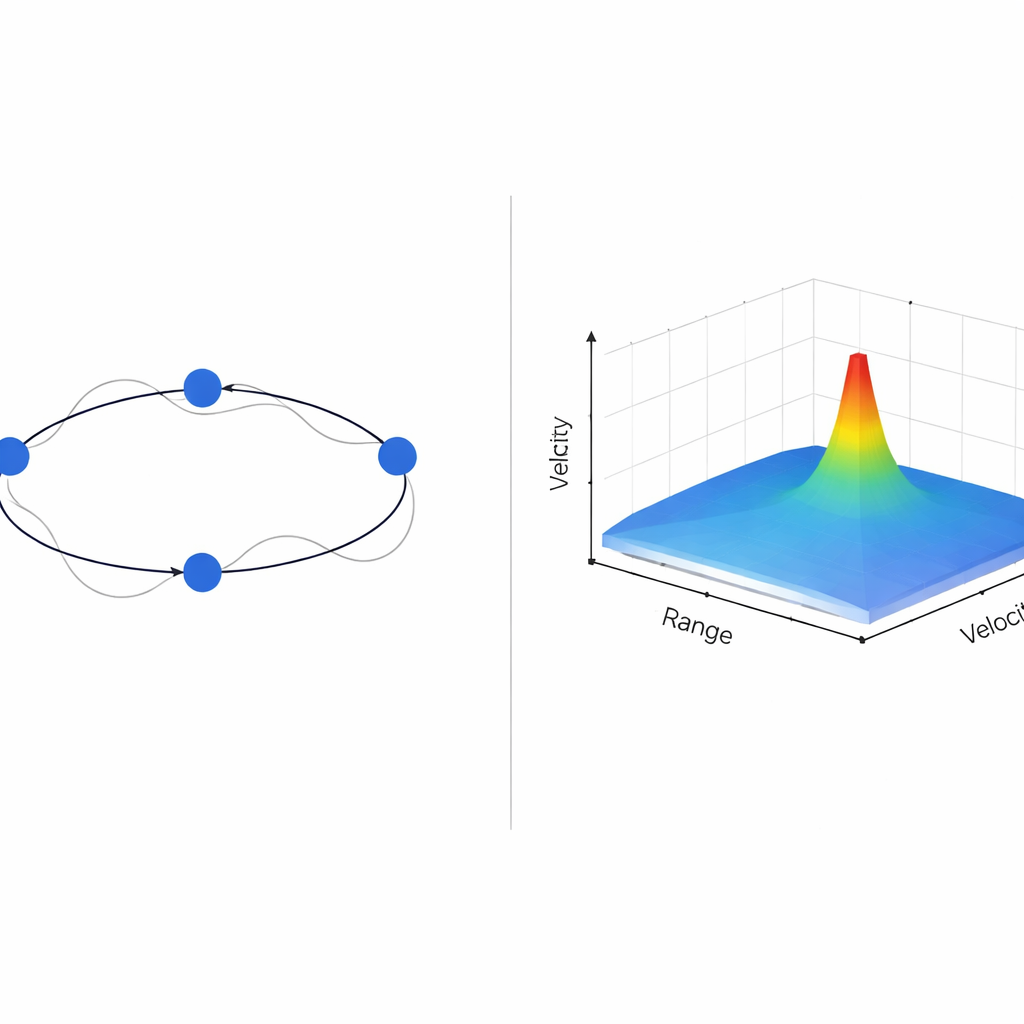
Sätta metoden på prov
Genom en serie simuleringar jämför forskarna sitt grafbaserade angreppssätt med en allmänt använd högprecisionsmetod känd som MUSIC. De testar scenarier med ett och flera mål, undersöker hur väl varje metod separerar nära objekt och studerar prestanda när signalerna är mycket svaga i förhållande till brus. Den grafbaserade algoritmen uppnår liknande total beräkningsbörda som klassiska metoder, men erbjuder skarpare upplösning i avstånd, vinkel och hastighet. Den är särskilt effektiv när det gäller att dämpa falska toppar orsakade av brus, vilket leder till renare och mer pålitliga mål-kartor. Även när signal-till-brus-förhållandet är dåligt — villkor där många traditionella metoder har svårt — behåller den nya algoritmen snäva felgränser för var målen är och hur snabbt de rör sig.
Vad detta innebär för verklig radar
Enkelt uttryckt visar detta arbete hur det att behandla radardata som levande på ett nätverk möjliggör smartare bearbetning som kan skilja verkliga mål från störning tydligare. För tillämpningar som sträcker sig från försvar och flygtrafikledning till fordonsäkerhet och miljöövervakning lovar den föreslagna tekniken mer exakt spårning av flera rörliga objekt under svåra förhållanden, utan att kräva orimliga mängder beräkningar. Genom att förena avancerad antenndesign med grafbaserad matematik visar författarna en praktisk väg mot radarer som ser längre, skarpare och mer tillförlitligt i en allt mer komplex elektromagnetisk miljö.
Citering: Li, Q., Meng, A., Liao, K. et al. A joint range–angle–velocity estimation algorithm for FDA-MIMO radar based on graph signal processing. Sci Rep 16, 6000 (2026). https://doi.org/10.1038/s41598-026-36124-x
Nyckelord: radaravkänning, målspårning, signalbehandling, graf-signalbehandling, FDA-MIMO