Clear Sky Science · sv
Riktningmedveten och självadaptiv A*-algoritm med PPO‑heuristik för UAV‑ruttplanering i smarta städer
Smartare rutter för stadsdroner
Föreställ dig flottor av små leveransdroner som slingrar sig mellan skyskrapor och levererar medicin, paket eller nödmaterial i en hektisk stad. För att flyga säkert och snabbt måste varje drönare hela tiden avgöra vilken väg den ska ta härnäst. Denna artikel presenterar en ny metod för drönare att hitta bättre rutter i trånga tredimensionella stadsmiljöer och gör deras banor kortare, mjukare och mer tillförlitliga än traditionella metoder.

Varför det är så svårt att hitta en bra väg
För en drönare handlar val av rutt om mer än att dra en rak linje från punkt A till punkt B. Den måste undvika byggnader, träd och flygförbudszoner samtidigt som den respekterar begränsningar för svängradie och flyghöjd. Klassiska ruttplaneringsmetoder, som den välkända A*-algoritmen, fungerar bra på enkla kartor men kämpar i realistiska 3D‑stadsmiljöer. De undersöker ofta för många möjliga nästa steg, slösar beräkningskraft och kan ge zick‑zack‑rutter som är längre än nödvändigt eller till och med misslyckas när omgivningen är mycket trång. I takt med att smarta städer blir mer komplexa blir dessa svagheter en allvarlig flaskhals för säker och effektiv luftrumstrafik.
En riktningmedveten uppgradering av ett klassiskt verktyg
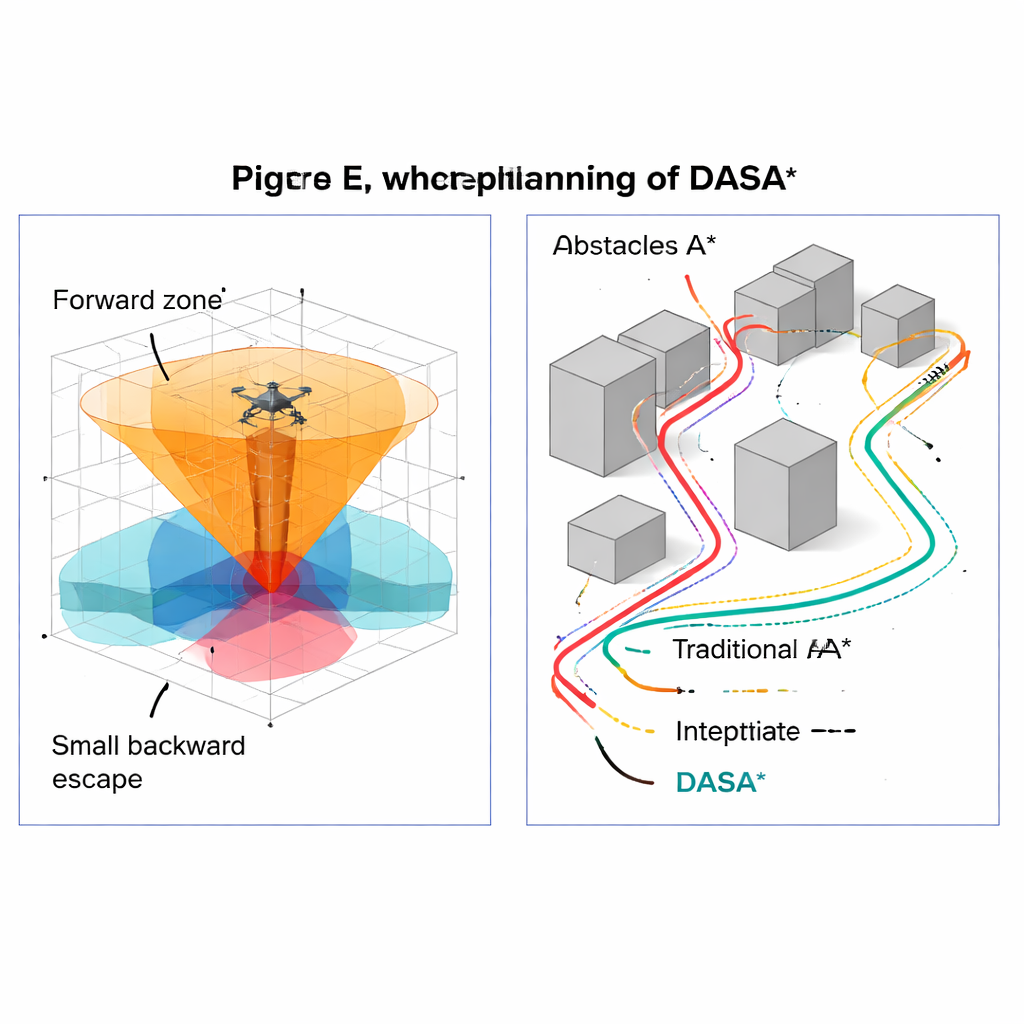
Författarna bygger vidare på A*-algoritmen och föreslår en förbättrad version kallad DASA* (Direction‑Aware and Self‑Adaptive A*). Istället för att blint söka åt alla håll runt drönaren uppmärksammar DASA* var målet ligger. Den klassificerar närliggande kandidatpositioner i tre lager: de som mestadels ligger framför drönaren mot målet, de som ligger åt sidorna, och en liten uppsättning bakom som kan hjälpa till att ta sig ur återvändsgränder. En enkel stall‑detektor övervakar tecken på att sökningen håller på att "fastna" och vid behov vidgar den automatiskt sökningen från en smal framåtkon till ett fylligare grannskapsområde. Denna måljusterade expansion minskar onödig utforskning samtidigt som den garanterar att en giltig rutt hittas om en sådan existerar.
Anpassning till trånga och öppna områden
En annan nyckelfunktion i DASA* är att den ändrar sitt steg beroende på omgivningen. När drönaren är långt från hinder tar algoritmen större steg och täcker snabbt öppet område. När den närmar sig byggnader eller andra faror växlar den till mindre steg, vilket möjliggör precis manövrering i trånga utrymmen. Denna variabla "zoomeffekt" gör det möjligt för planeringen att röra sig snabbt där det är säkert och sakta ner endast där noggrannhet är viktig. När en rå rutt hittats tar en särskild justeringsfas bort onödiga vägpunkter och anpassar en slät kurva genom de återstående nyckelpunkterna. Resultatet är en bana som inte bara undviker kollisioner utan också liknar en naturlig flygprofil som en skicklig pilot skulle välja, med färre plötsliga svängar.
Lära algoritmen att se framåt
Traditionell A* förlitar sig på enkla avståndsformler för att uppskatta hur långt varje position är från målet. DASA* ersätter denna tumregel med en inlärd vägledare baserad på Proximal Policy Optimization (PPO), en modern förstärkningsinlärningsteknik. I en träningsmiljö övar en virtuell agent upprepade gånger på att röra sig mot ett mål i 3D‑utrymme samtidigt som den känner av avstånd, höjdskillnader och riktningsinformation. Ett neuralt nätverk lär sig gradvis hur lovande varje situation är och fungerar efter träning som en plug‑in "intuitionsmodul" för DASA*. Denna inlärda heuristik styr sökningen mer direkt mot bra lösningar, särskilt i komplexa layouter där enkel raklinjeavstånd är missvisande.
Hur bra det fungerar i virtuella städer
Forskarna testade DASA* i flera simulerade 3D‑stadsscenarier fyllda med lådformade byggnader och cylindriska hinder som efterliknar verkliga urbana strukturer. De jämförde den med klassisk A* och flera populära alternativ, inklusive förbättrade versioner av rapidly exploring random trees, partikelsvärmar, differential evolution och en annan A*‑variant kallad Theta*. I många testfall fann DASA* konsekvent kortare rutter, expanderade betydligt färre kandidatpunkter och körde mycket snabbare — ofta 10 till 50 gånger snabbare än standard A*. Den bibehöll också perfekt eller nästan perfekt framgångsgrad även i täta, labyrintliknande miljöer, medan vissa konkurrerande metoder oftare misslyckades eller producerade långa, slingrande omvägar.
Vad detta betyder för vardagen
Enkelt uttryckt ger DASA* flygande robotar en bättre känsla för riktning och omdöme. Genom att fokusera på lovande riktningar, anpassa detaljnivån efter lokal miljö, använda en inlärd känsla för hur nära man är framgång och finslipa den slutliga rutten förvandlar den råa kartdatan till färdvägar som är effektiva, jämna och praktiska. Om metoden införs i verkliga system kan den hjälpa framtida smarta städer att hantera drönarleveranser, inspektioner och räddningsinsatser säkrare och mer tillförlitligt, även när luftrummet blir mer trafikerat och miljöerna mer komplexa.
Citering: Zhang, X., Tan, L. & Chai, J. Direction aware and self-adaptive A* algorithm with PPO heuristic for UAV path planning of smart city. Sci Rep 16, 6174 (2026). https://doi.org/10.1038/s41598-026-36066-4
Nyckelord: UAV-ruttplanering, droner i smarta städer, A*-algoritm, autonom navigation, robotrörelseplanering