Clear Sky Science · sv
Sensorlös fullhastighetspositionsstyrning för PMSM baserad på förbättrad super-twisting sliding-mode-observatör och mjuk övergångsoptimering
Hålla elmotorer intelligenta utan extra hårdvara
Från elbilar till flygplansaktuatorer förlitar sig många moderna maskiner på en särskild typ av elmotor kallad synkronmotor med permanentmagnet (PMSM). Dessa motorer är effektiva och kraftfulla, men de behöver vanligtvis känsliga sensorer för att spåra varvtal och rotorposition. Sensorer ökar kostnaden och kan gå sönder i hårda miljöer. Denna studie undersöker hur man kan driva dessa motorer mjukt och precist i hela varvtalsområdet utan några mekaniska sensorer alls.
Varför det är så svårt att göra sig av med sensorer
I en typisk PMSM-drivning monteras små positionssensorer på motoraxeln för att tala om exakt var rotorn befinner sig. Den informationen är avgörande för att mata in ström i lindningarna vid rätt tidpunkt, ungefär som en välavvägd knuff på en snurrande karusell. Men sensorer kan vara ömtåliga, otympliga och dyra. Ingenjörer har länge försökt ersätta dem med ”sensorlösa” metoder som härleder rotorpositionen från motorns egna elektriska signaler. Problemet är att ingen enskild metod fungerar bra i alla hastigheter. Vid låga hastigheter är de elektriska signalerna svaga, medan enkla metoder blir brusiga och oprecisa vid höga hastigheter. Att överbrygga det gapet utan ryck, vibrationer eller förlorad kontroll har varit en återkommande utmaning.
Två smarta sätt att lyssna på motorn
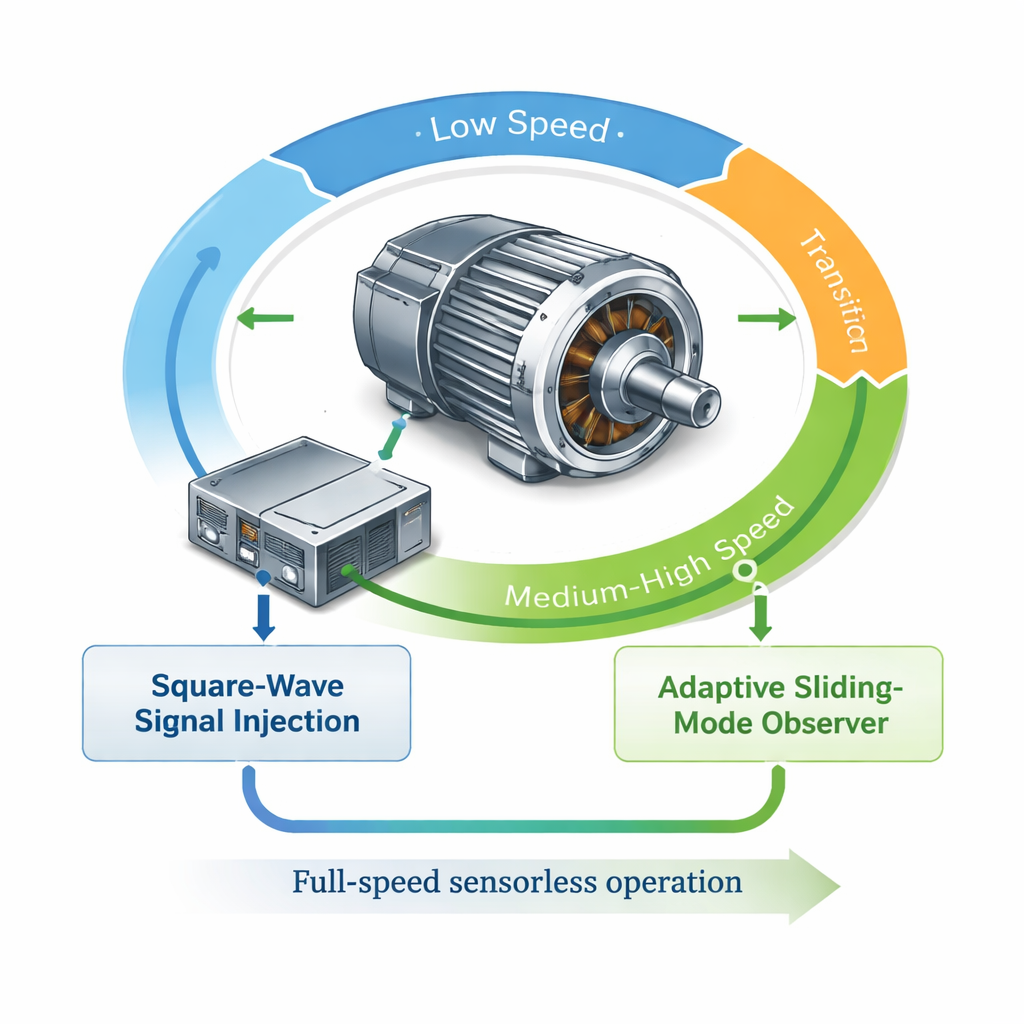
För att täcka hela varvtalsområdet kombinerar författarna två kompletterande sensorlösa tekniker. Vid låga hastigheter, där motorns naturliga elektriska återkoppling är för svag för att mätas pålitligt, injicerar de medvetet en snabb fyrkantspänningssignal i lindningarna. Motorn svarar olika beroende på rotorvinkeln, så genom att analysera den resulterande högfrekventa strömmen kan styrenheten härleda var rotorn är. Denna ”högfrekventa injicering” fungerar som att skicka ut en försiktig probesignal och läsa ekot. Vid medelhöga och höga hastigheter ger motorn starkare naturlig återkoppling, känd som backemk. Här använder teamet en avancerad matematisk observatör som spårar motorns beteende och uppskattar rotorposition och hastighet från uppmätta spänningar och strömmar.
Göra den digitala observatören smartare och tystare
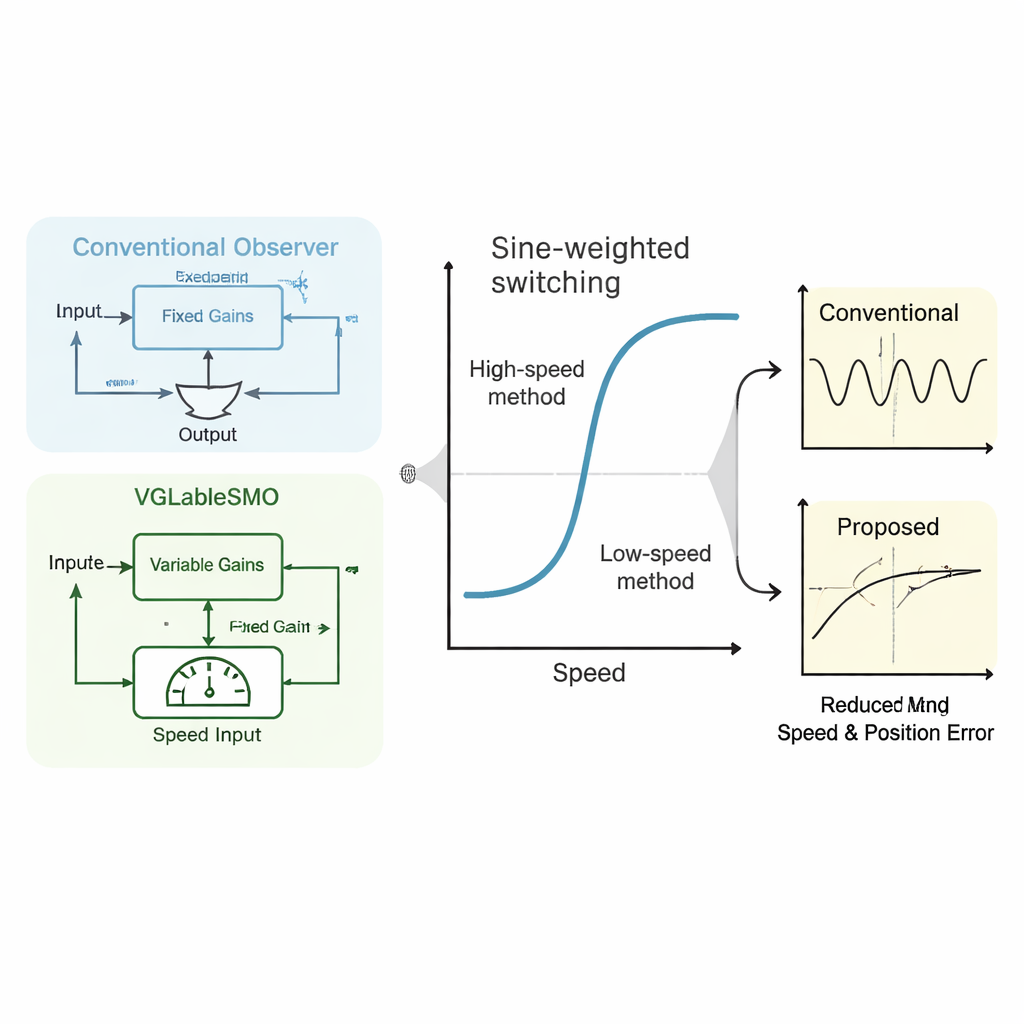
Den centrala innovationen för höghastighetssidan är en uppgraderad observatör kallad variabel-förstärknings linjär super-twisting sliding-mode-observatör (VGLSTSMO). Traditionella sliding-mode-observatörer uppskattas för sin robusthet mot brus och störningar, men de lider ofta av så kallad ”chattering”, små men snabba oscillationer som kan påverka vridmoment och hastighet. De förlitar sig också på fasta interna inställningar som kan fungera bra i ett driftfall men dåligt i ett annat. Den föreslagna observatören justerar automatiskt sina interna vinster när motorns hastighet ändras och lägger till ett korrigerande led som mjukt drar uppskattningarna mot verkliga värden. En adaptiv mekanism förfinar dessutom uppskattningen av motorns interna spänning, vilket förbättrar noggrannheten för både hastighet och position. Datorsimuleringar visar att denna smartare observatör minskar positionsfelet vid medel–höga hastigheter från cirka 0,9 radianer till ungefär 0,2 radianer och förkortar tiden det tar för systemet att stabilisera sig efter en laständring.
Utjämning av handskakningen mellan låga och höga hastigheter
Att köra två olika skattningsmetoder väcker ett annat problem: hur man byter smidigt mellan dem när motorn accelererar. Ett enkelt tillvägagångssätt är att tona ut den ena metoden och tona in den andra med en rak linjär viktning, men det kan fortfarande orsaka stötar i vridmoment och hastighet. Författarna föreslår en mildare, sinusformad viktfunktion. Inom ett valt övergångsband skiftar styrsystemet gradvis förtroendet från lågvarvsmetoden till höghastighetsobservatören enligt en mjuk vågform istället för en brant ramp. Denna förfinade blandning reducerar märkbart hastighetshopp och vinkelstörningar under bytet, minskar den förbigående vinkelavvikelsen och halverar tiden det tar för felen att lägga sig.
Vad detta betyder för maskiner i verkliga världen
Sammantaget levererar den kombinerade strategin—att prova motorn vid låga hastigheter, använda en adaptiv observatör vid högre hastigheter och växla mellan dem med en mjuk sinusviktning—stabil och noggrann styrning över hela varvtalsområdet utan mekaniska sensorer. I simuleringar håller den föreslagna metoden hastighetsöversläng och stationära fel små samtidigt som den undviker kraftigt chattering som kan orsaka buller, slitage och obehag. För vardagliga tillämpningar innebär detta att elfordon, industridrivningar och framdrivningssystem kan bli mer pålitliga, kompaktare och billigare att bygga, samtidigt som de bibehåller precis rörelsestyrning utan att vara beroende av ömtåliga axelmonterade sensorer.
Citering: Zhang, X., Li, P., Wang, B. et al. Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization. Sci Rep 16, 5730 (2026). https://doi.org/10.1038/s41598-026-35994-5
Nyckelord: sensorlös motorstyrning, synkronmotor med permanentmagnet, sliding-mode-observatör, högfrekvent signalinjicering, elektriska drivsystem