Clear Sky Science · sv
Påverkan av strukturella parametrar på arbetsområdet för delta-parallellrobotar och optimering av bananpassning för sorteringsapplikationer av färska teblad
Robotar ansluter till tefabriken
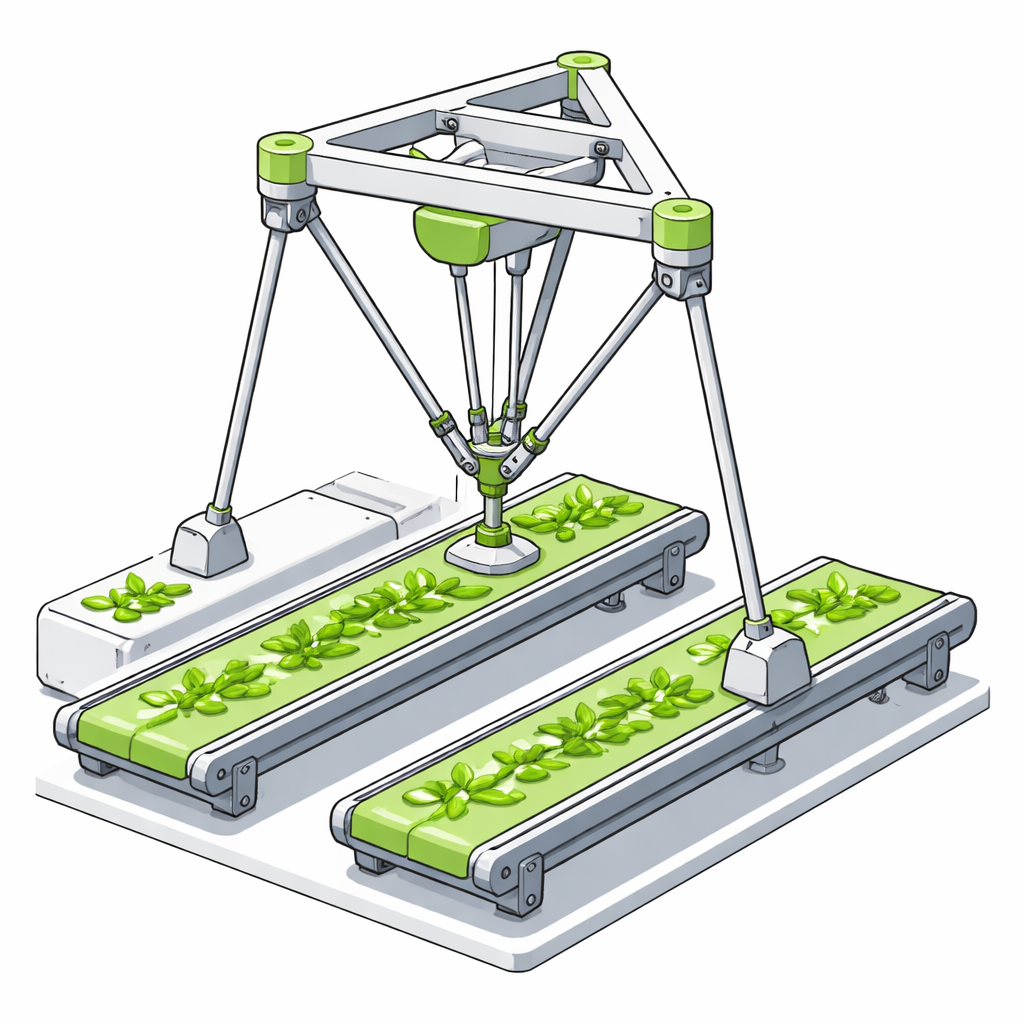
Färska teblad är ömtåliga: krossa en knopp eller skada ett blad och den slutliga drycken påverkas. Att sortera dessa blad för hand är däremot tröttande och långsamt. Denna artikel undersöker hur en snabb, lätt industrirobot—en så kallad Delta-robot—kan ställas in så att den rör sig snabbt och precist över tetransportbanden samtidigt som den hanterar bladen varsamt och pålitligt.
Varför teblad kräver särskild behandling
I modern tebearbetning är sortering av färska blad avgörande för kvalitet och pris. Människor har svårt att hålla takt och bibehålla konsistens, särskilt under långa arbetspass. Delta-robotar, som ofta används för högfartsförpackning, verkar vara en naturlig lösning: de är styva, exakta och kan röra sig i imponerande hastigheter. Men de flesta tidigare konstruktioner var avsedda för generella föremål som lådor eller muttrar, inte för ömtåliga teknoppar som begränsas till ett smalt område mellan två transportband. Robotens ”arbetsområde”—det tredimensionella utrymmet den kan nå—måste matcha detta trånga område och följa en specifik grindformad rörelse: greppa, lyfta, föra över och placera, allt utan att slå i sina egna delar eller missa målen.
Hur robotens form styr var den kan nå
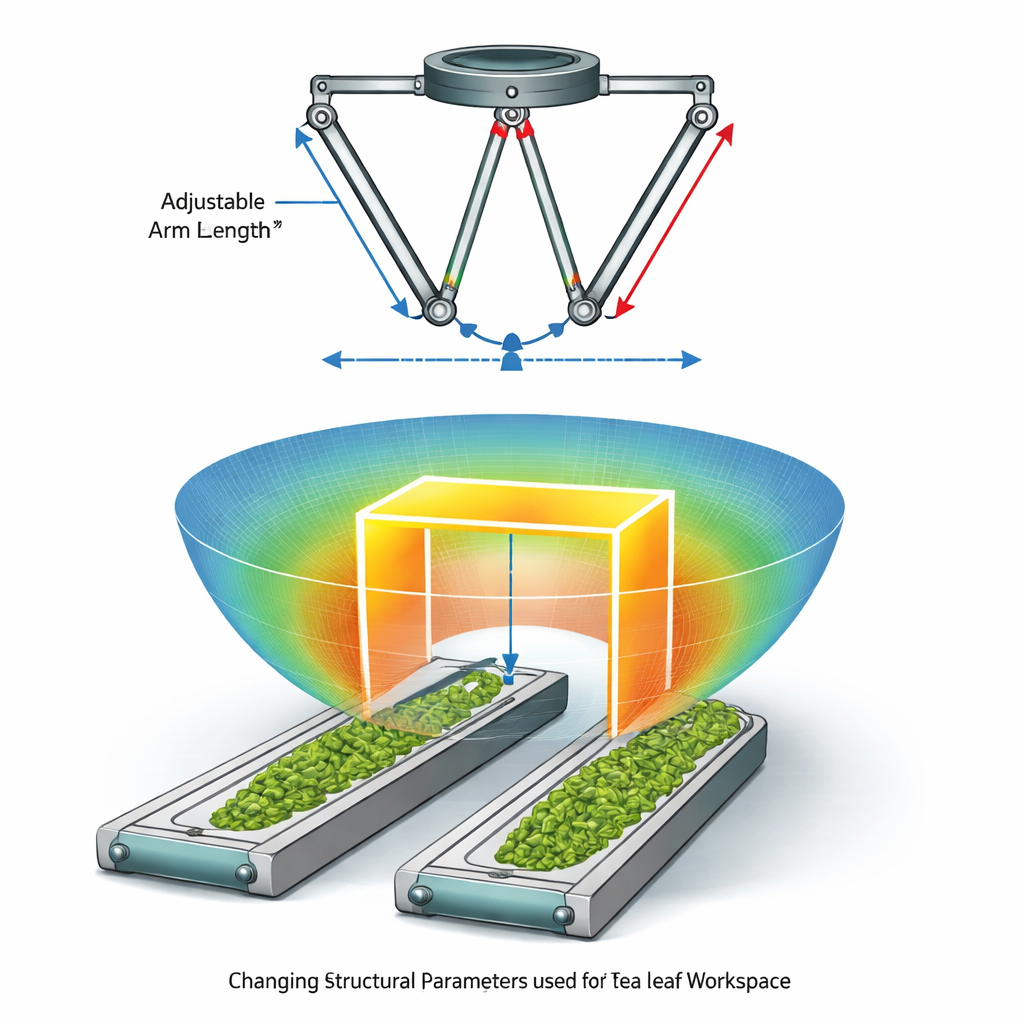
Författarna inleder med att bygga en detaljerad matematisk beskrivning av Delta-robotens rörelse. De kopplar vinklarna hos dess tre drivleder till den exakta positionen för den lilla rörliga plattformen som bär en sugkoppsgreppare. Med både framåt- (vinklar till position) och inversa (position till vinklar) beräkningar definierar de varje punkt slutverktyget fysiskt kan nå när ledvinklarna är begränsade till ett säkert intervall. Med dessa ekvationer implementerade i MATLAB simulerar de robotens fullständiga nåbara volym och visar den från flera vyer som ett färgrikt, skålformat punktmoln. Detta arbetsområde blir sedan grunden för att bedöma om en given mekanisk design kan hantera te-sorteringsbanan.
Test av många konstruktioner med virtuella experiment
I stället för att bygga flera fysiska prototyper behandlar teamet fyra nyckelgeometrival som designreglage: längden på överarmarna (L), längden på underarmarna (l), radien på den fasta bastriangeln (R) och radien på den rörliga triangeln (r). De använder ett ortogonalt experimentupplägg som effektivt sampelrar kombinationer av dessa fyra parametrar på tre nivåer vardera, vilket ger nio virtuella robotar. För varje robot beräknar programmet den totala arbetsvolymen och visar hur den överlappar en standardiserad grindformad banlåda med måtten 200 mm hög, 400 mm bred och 200 mm djup. Detta låter forskarna se inte bara hur stor varje arbetsvolym är, utan också om den faktiskt täcker det område där tebladen transporteras på banden.
Att hitta vilka mått som spelar störst roll
Genom att jämföra de nio simulerade konstruktionerna rangordnar studien hur starkt varje strukturellt val påverkar användbar räckvidd. Den tydliga vinnaren är den passiva (nedre) armens längd: längre underarmar förstorar arbetsområdet avsevärt. Näst viktigast är den aktiva (övre) armens längd, som också ökar rörelseområdet men kan introducera vibrationer om den görs för lång. Basradien har en måttlig effekt; om basen är för bred kolliderar de rörliga armarna lättare med ramen, vilket krymper den verkligt användbara volymen. Radien på den rörliga plattformen har den svagaste effekten, men en mindre plattform hjälper ändå något genom att öppna utrymme för armarna. Spridnings- och variansanalyser visar att även om vissa parameterval ger den största totala arbetsvolymen täcker de inte nödvändigtvis det smala, grindformade området som är viktigt för te-sortering.
En design som passar te-linjen
Den mest praktiska konfigurationen visar sig inte vara den med störst total volym, utan den vars arbetsområde väl omsluter den grindformade banan. En särskild kombination—250 mm övre armar, 400 mm nedre armar, en basradie på 90 mm och en rörlig plattformsradie på 50 mm—täcker helt den nödvändiga banan mellan de två transportbanden samtidigt som roboten hålls kompakt och stabil. Vid en driftshöjd runt 325 mm över referensplanet uppnår roboten sitt bredaste användbara spann, mer än tillräckligt för att omfatta båda banden och genomföra grepp–lyft–förflyttning–placeringscykeln utan att lämna det säkra området.
Vad detta betyder för framtida tefabriker
För icke-specialister är huvudbudskapet att små förändringar i en robots lem- och plattformsstorlekar kan avgöra om en maskin bara rör sig imponerande i fritt utrymme eller om den fungerar pålitligt i en verklig produktionslinje. Genom att kvantifiera hur varje strukturell parameter formar den nåbara volymen och dess överlapp med en realistisk grindformad bana erbjuder denna studie en receptur för att utforma Delta-robotar som sorterar teblad snabbt, exakt och med minimal skada. Samma metod kan vägleda skräddarsydda robotar för andra livsmedel eller ömtåliga produkter där hastighet, precision och varsam hantering måste uppfyllas samtidigt.
Citering: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
Nyckelord: deltarobot, sortering av teblad, robotarbetsområde, plocka-och-placera, industriell automation