Clear Sky Science · sv
Utveckling och utvärdering av ett ytstyrt patientpositionssystem för bor‑neutronfångstterapi
Skarpare inriktning för cancerbekämpande neutroner
Boron Neutron Capture Therapy (BNCT) är en lovande cancerbehandling som kan skada tumörceller selektivt samtidigt som mycket av den omgivande friska vävnaden skonas. För att denna precision ska få effekt måste läkare placera patienten exakt på rätt plats framför en stadig neutronstråle—ofta inom en millimeter. Denna artikel beskriver ett nytt kameraunderstödt och robotstyrt positionssystem som är utformat för att göra den känsliga uppställningen snabbare, mer exakt och mindre beroende av teknikerens stadiga hand och omdöme.
Varför positioneringen är så viktig
Till skillnad från många moderna strålningsmaskiner som kan svänga runt patienten och omforma sina röntgenstrålar, förlitar sig BNCT på en tung, fast neutronkälla med begränsade möjligheter att styra strålen. Det är patienten, inte strålen, som måste flyttas till exakt rätt läge. Traditionellt använder personal lasrar, hudmärken och manuella förflyttningar av britsen för att göra detta. Den processen är långsam, är starkt beroende av operatörens skicklighet och kan lämna kvar små positionsfel som ändrar hur mycket dos en tumör—och intilliggande organ—faktiskt får. När BNCT‑center öppnas för att behandla komplicerade tumörer i huvud, hals och andra svåråtkomliga områden blir dessa begränsningar ett allvarligt hinder.
En högteknologisk hjälp: kameror, mjukvara och en robot
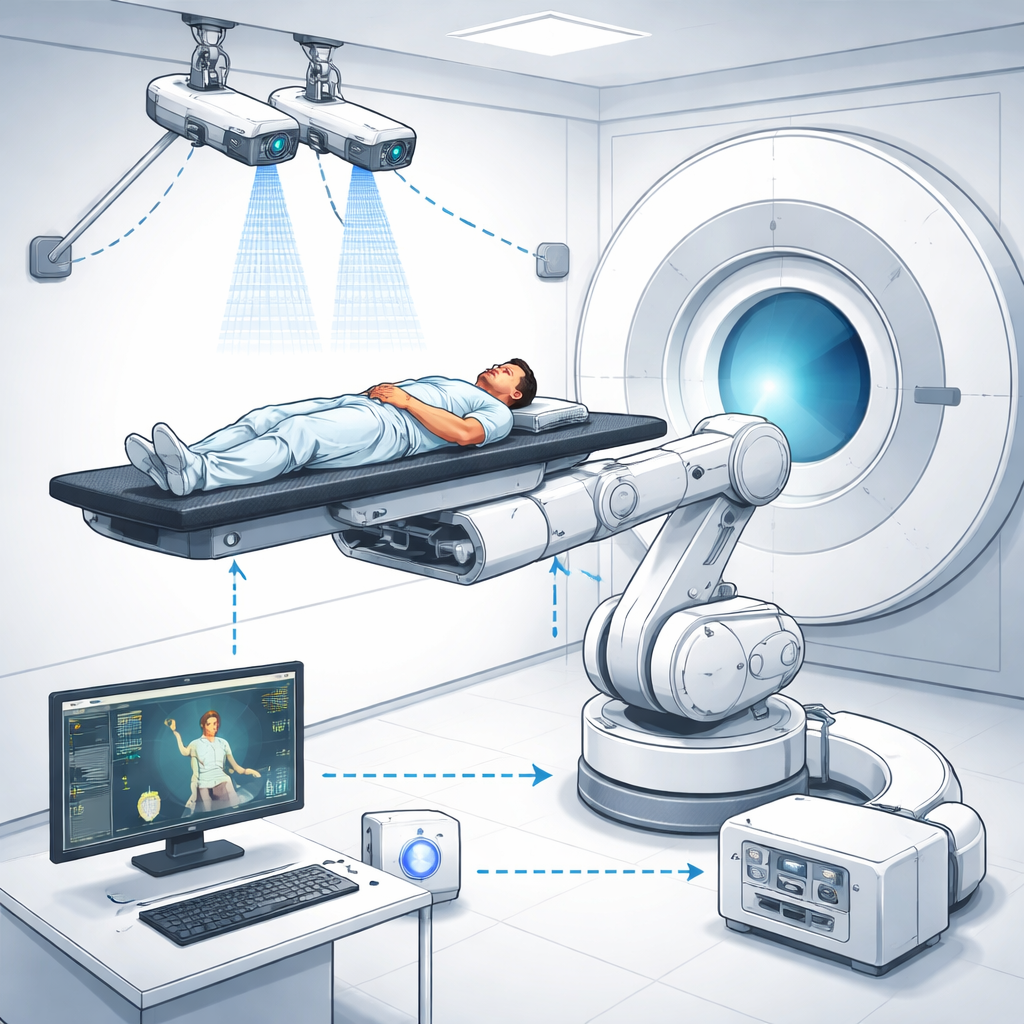
För att tackla detta problem byggde forskargruppen ett integrerat Surface‑Guided BNCT (SG‑BNCT)‑system som kombinerar tre huvuddelar: ett specialiserat behandlingsplaneringsprogram kallat NeuMANTA, ett binoculart stereovisionskamerapar och en sexaxlig industrirobot som bär behandlingsbritsen. I NeuMANTA planerar läkarna BNCT‑behandlingen på CT‑bilder, inklusive den exakta punkt där neutronstrålen ska passera och tre små referenspunkter, eller fiducialmarkörer, på patientens hud. Dessa markörer definierar patientens position i planeringsbilderna och kopplar den planen till verklighetens behandlingsrumkoordinater via matematiska transformationsmatriser.
Hur 3D‑kameror ser och korrigerar uppställningen
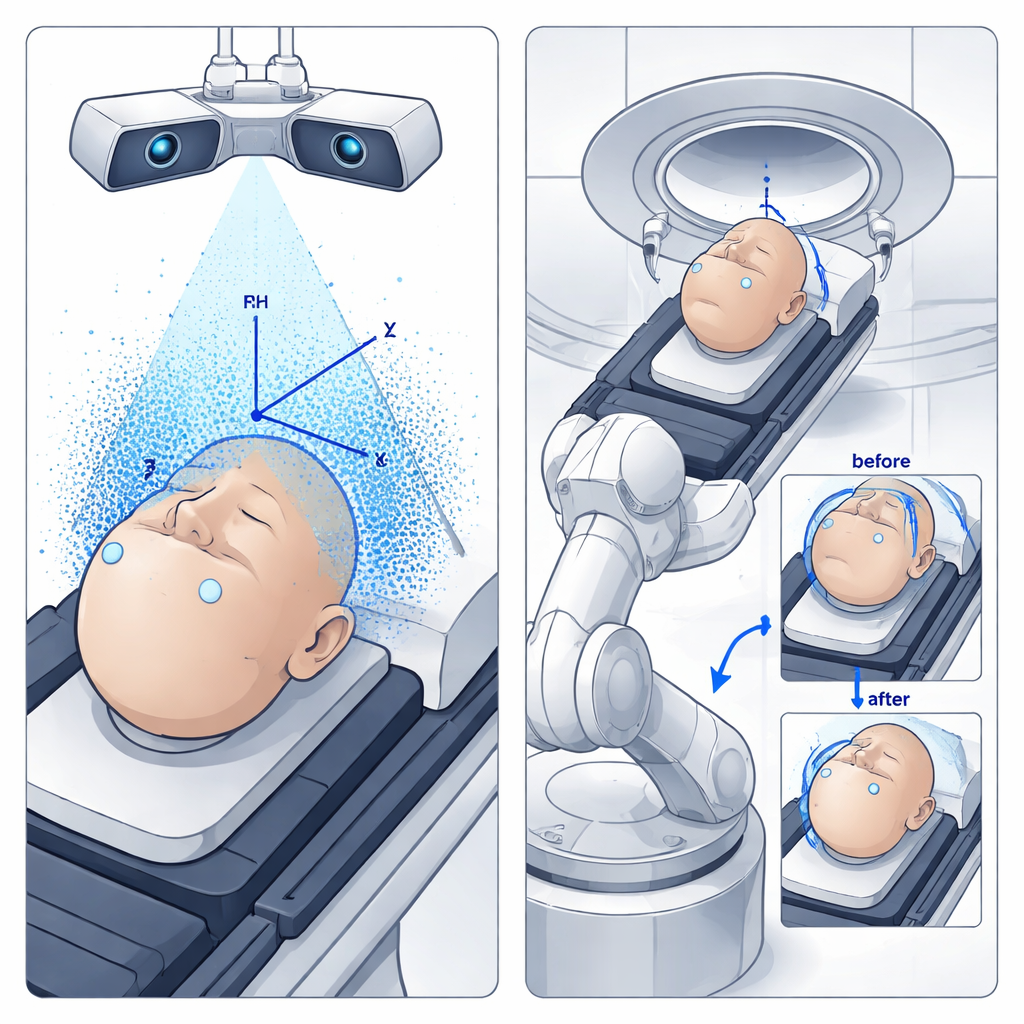
I behandlingsrummet bevakar två högupplösta kameror patienten från olika vinklar, ungefär som människans ögon. Genom att använda en modern objektidentifieringsalgoritm (YOLO) tränad på över tusen bilder hittar systemet snabbt samma fiducialmarkörer på patientens yta. Genom att jämföra hur varje markör framträder i vänster och höger kameravy rekonstruerar datorn deras 3D‑positioner och skapar ett detaljerat punktmoln av ytan. Utifrån tre icke‑kollineära markörer återskapas ett patientkoordinatsystem och jämförs med det koordinatsystem som definierats i behandlingsplanen. Varje missmatch mellan planerad och faktisk position omvandlas till translations‑ och rotationskommandon—sex frihetsgrader totalt—för industriboten som bär patientbritsen.
Testning med en stand‑in‑patient
Innan systemet användes på verkliga patienter testade teamet det med en antropomorf fantom—en människolik modell—utrustad med interna och ytliga markörer som var synliga både i CT‑skanningar och för kamerorna. De skapade flera behandlingsuppställningar i NeuMANTA med olika strålriktningar och bad sedan SG‑BNCT‑systemet att reproducera dessa planer genom att automatiskt flytta fantomen på plats. En laser placerad i centrum av neutronöppningen fungerade som en ersättare för den faktiska strålen, så att forskarna direkt kunde mäta hur långt den slutliga punkten på fantomen avvek från det avsedda målet, både längs strålaxeln (källa‑till‑hudavstånd) och sidledes i planet vinkelrätt mot strålen.
Hur nära kom systemet?
Över 24 experimentella uppställningar låg systemets positionsfel typiskt under 1 millimeter i båda riktningar, med de värsta enkelpassfelen som nådde omkring 2 till 3 millimeter längs strålningsaxeln. Författarna spårade dessa kvarvarande avvikelser till tre huvudkällor: tjockleken på CT‑bildlagren, små kalibreringsosäkerheter i stereokamerorna och små pixel‑nivåfel när mjukvaran detekterar markörerna. Viktigt är att systemet är utformat för att arbeta i ett slutet kretslopp: det mäter upprepade gånger markörernas positioner, uppdaterar 3D‑inpassningen och kommanderar ytterligare finjusterande rörelser av roboten tills kvarvarande fel understiger en förinställd tröskel. I dessa iterativa tester sjönk de slutliga avvikelserna konsekvent till väl under 1 millimeter, och submillimeternoggrannhet uppnåddes både i djup och sidled.
Vad detta betyder för patienterna
För patienter som kan ha nytta av BNCT—särskilt de med tumörer i komplexa eller känsliga områden—lovar detta ytstyrda, robotassisterade positionssystem mer tillförlitliga och effektiva behandlingar. Genom att knyta behandlingsplaneringsmjukvaran direkt till kameror som ser den faktiska patienten och till en robot som kan utföra precisa rörelser minskar metoden beroendet av manuell laserinriktning och mänskligt uppskattningsarbete. Medan den nuvarande versionen är för långsam för verklig realtidsuppföljning av rörelser, och hittills bara statiska tester har utförts, visar resultaten att tekniken rutinmässigt kan positionera en patient med submillimeternoggrannhet. Med ytterligare hastighetsförbättringar och strålningshärdning av hårdvaran skulle detta tillvägagångssätt kunna bli en praktisk ryggrad för säkrare, mer konsekventa BNCT‑behandlingar i kliniken.
Citering: Chen, J., Xie, QL., Ping, JJ. et al. Development and evaluation of surface-guided patient position system for boron neutron capture therapy. Sci Rep 16, 5818 (2026). https://doi.org/10.1038/s41598-026-35834-6
Nyckelord: bor‑neutronfångstterapi, patientpositionering, stereovision, medicinsk robotik, ytstyrning