Clear Sky Science · sv
Tillämpning av ett temporalt konvolutionsnätverksalgoritm förenat med kanaluppmärksamhetsmodul för UWB-inomhuspositionering
Varför det är så svårt att hitta människor inomhus
Smartphones, service- och lagerrobotar måste veta exakt var de befinner sig, även när GPS-satelliter inte når inomhus. Ultra‑wideband (UWB)-radio har blivit en ledande kandidat för den uppgiften eftersom den kan mäta avstånd med centimeterprecision. Men i verkliga, röriga miljöer fyllda av väggar, glas och rörliga människor studsar, böjs eller blockeras radiosignalerna ofta tillfälligt, vilket ger plötsliga hopp i den rapporterade positionen. Den här artikeln undersöker en ny metod baserad på artificiell intelligens som gör UWB-positionering betydligt mer exakt och stabil i sådana komplicerade inomhusmiljöer.
Radiopulser i ett trångt rum
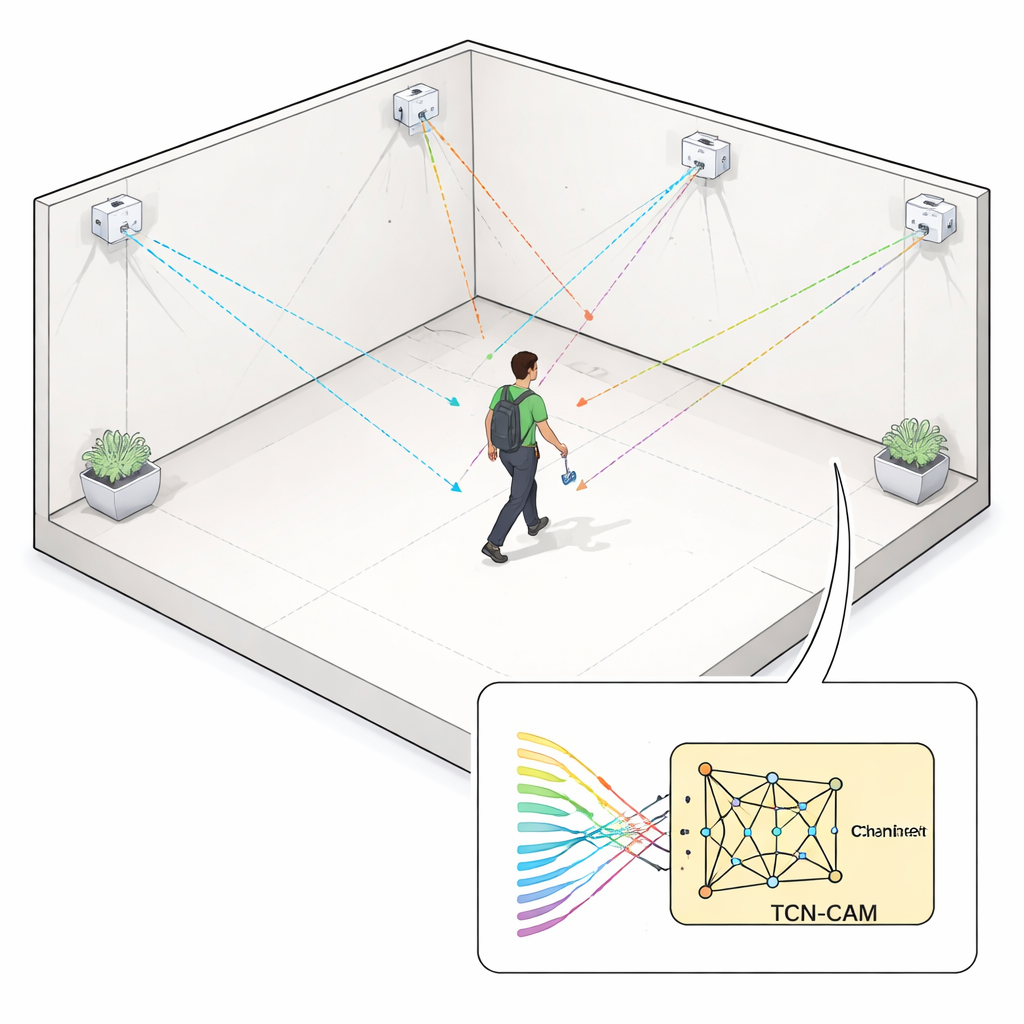
UWB-system lokaliserar en enhet, kallad tag, genom att mäta hur lång tid extremt korta radiopulser tar för att färdas mellan tagen och flera fasta basstationer. I enkla, öppna utrymmen fungerar denna "time of arrival"-metod väl. Men inomhus följer signalerna ofta indirekta vägar—de studsar mot dörrar, fönster och människor—innan de når en mottagare. Dessa icke-siktlinjevägar, eller NLOS, får tagen att verka längre bort än den egentligen är. Traditionella lösningar bygger på noggrant utformade matematiska filter eller på maskininlärningsverktyg som först försöker märka varje signal som ren eller förvrängd. Trots att de hjälper är dessa metoder antingen starkt beroende av expertinställningar eller kämpar fortfarande när människor rör sig oförutsägbart genom rummet.
Låta data berätta historien över tid
Forskarna föreslår en annan strategi: i stället för att behandla varje avläsning isolerat tittar de på hur avläsningarna förändras över tid och låter en djupinlärningsmodell lära sig mönstren. Deras huvudsakliga verktyg är ett temporalt konvolutionsnätverk (TCN), en typ av neuralt nätverk utformat för tidsseriedata. Till skillnad från rekurrenta nätverk som bearbetar ett ögonblick i taget använder TCN-en-dimensionella konvolutioner som kan undersöka långa tidsserier parallellt. Denna design undviker vanliga träningsproblem och gör det möjligt för modellen att upptäcka subtila, långsiktiga trender—till exempel hur en person som går mellan tagen och en basstation temporärt förlänger det uppmätta avståndet för att sedan låta det återgå.
Lära nätverket vad det ska uppmärksamma
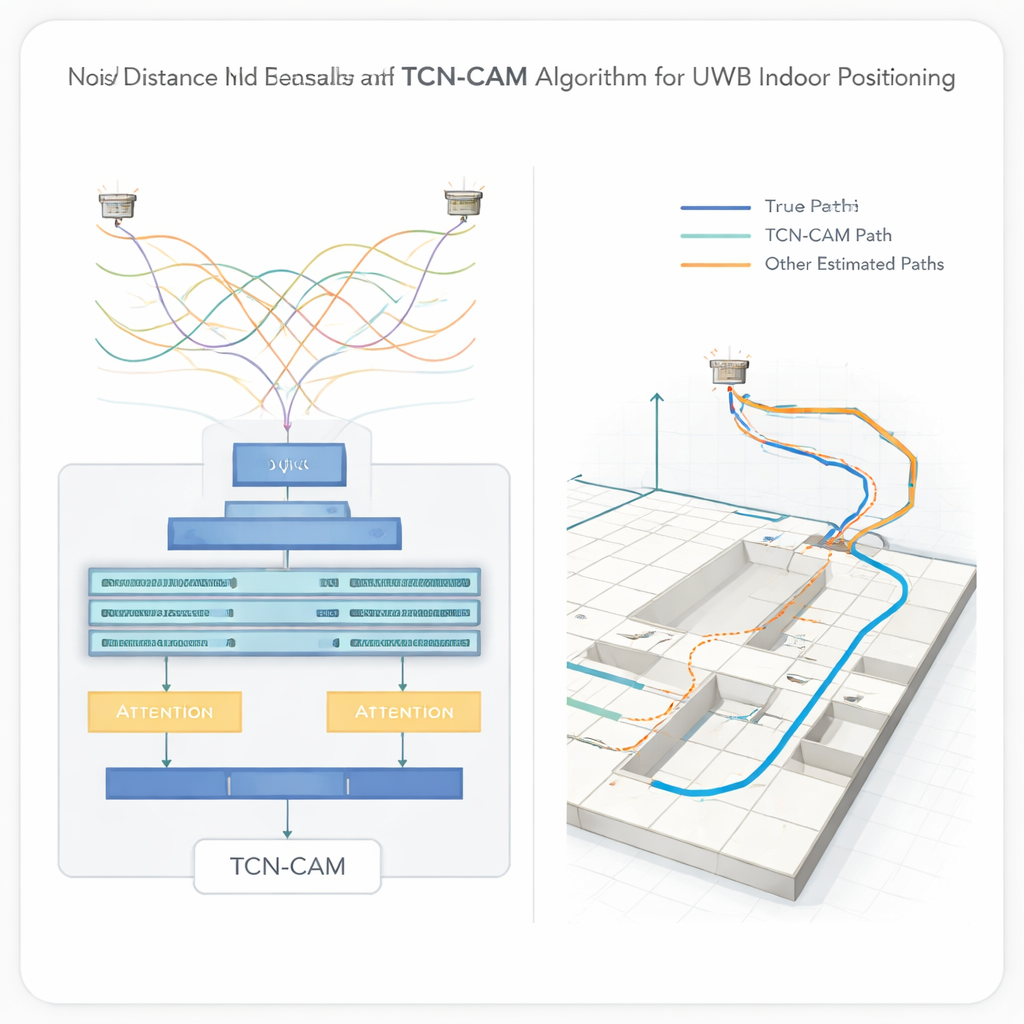
På toppen av TCN lägger teamet till en kanaluppmärksamhetsmodul (CAM). Varje basstation producerar sin egen ström av avståndsavläsningar, och inte alla är lika pålitliga vid varje givet ögonblick. CAM lär sig att tilldela olika vikter till dessa strömmar, förstärka de som verkar konsekventa och tona ner dem som verkar korrupta av reflektioner eller blockeringar. Tillsammans tar det kombinerade TCN‑CAM-nätverket råa, brusiga avstånd från sex basstationer och ger i ett enda end-to-end-steg den bästa uppskattningen av tagens tredimensionella koordinater, utan en separat signalklassificeringsfas.
Testning i simulerat brus och riktiga korridorer
För att utvärdera metoden skapade författarna först tusentals virtuella inomhuspositioner och simulerade UWB-mätningar med varierande nivåer av tillsatt brus och NLOS-fel. De jämförde sin TCN‑CAM-ansats med tre konkurrenter: ett long short‑term memory-nätverk med uppmärksamhet, en standard‑TCN och ett konvolutionsnät med kanaluppmärksamhet. När den simulerade störningen ökade ökade felen för alla metoder, men TCN‑CAM gav konsekvent de minsta felen och den snävaste fördelningen i resultaten, vilket indikerar både högre noggrannhet och större tillförlitlighet. I de hårdaste testförhållandena minskade det genomsnittliga positionsfelet med ungefär en fjärdedel till en halv jämfört med de andra metoderna.
Från laboratorium till verklig rörelse
Teamet gick sedan vidare till en verklig inomhusprovplats utrustad med sex UWB-basstationer, ett högprecisionsmätinstrument och människor som gick omkring för att medvetet orsaka signalblockeringar. Den nya algoritmen lokaliserade den rörliga tagen med ett genomsnittligt fel på endast 3,32 centimeter. Det var ungefär 19 % bättre än en vanlig TCN, 25 % bättre än konvolutions‑plus‑uppmärksamhetsmodellen och imponerande 76 % bättre än LSTM-baserade metoden. TCN‑CAM-resultaten klustrar sig inte bara tätare kring den verkliga banan, de följer också tagens faktiska tredimensionella bana trognare i alla riktningar.
Vad detta betyder för vardagsteknik
För icke-specialister är slutsatsen enkel: genom att låta en smart modell observera hur UWB-avståndsavläsningar förändras över tid och lära sig vilka signaler som är att lita på vid varje ögonblick kan inomhuspositionering bli mycket mer precis och mindre ryckig, även när människor rör sig och blockerar radiovägen. Även om metoden kräver omlärning om de fasta basstationerna flyttas erbjuder den en kraftfull och praktisk lösning för fabriker, sjukhus, lager och smarta byggnader där infrastrukturen står kvar. I takt med att liknande djupinlärningstekniker mognar och börjar kombinera UWB med andra sensorer kan inomhusenheter av alla slag snart känna till sina positioner nästan lika pålitligt som din telefon gör utomhus.
Citering: He, L., Lian, Z., Núñez-Andrés, M.A. et al. Application of a temporal convolutional network algorithm fused with channel attention module for UWB indoor positioning. Sci Rep 16, 6305 (2026). https://doi.org/10.1038/s41598-026-35802-0
Nyckelord: inomhuspositionering, ultrabredband, djupinlärning, tidsserieanalys, positionsspårning