Clear Sky Science · sv
Dynamisk global spårare för online-övervakning med flera kameror och flera fordon
Varför smartare trafikkameror spelar roll
Alla som suttit fast i en trafikstockning eller oroat sig för vägolyckor har känt gränserna i dagens trafiksystem. Moderna städer installerar nu nätverk av kameror längs motorvägar och vid korsningar för att bevaka trafiken i realtid. Men att få dessa kameror att samarbeta — att följa samma bil smidigt från en kamera till nästa — är förvånansvärt svårt. Denna studie presenterar ett nytt sätt att spåra fordon över många kameror samtidigt, vilket lovar snabbare och mer tillförlitlig övervakning som kan göra vägarna säkrare och trafikhushållningen mer lyhörd.
Problemet med dagens trafikspårning
Traditionella system behandlar varje kamera nästan som sin egen lilla värld. Först upptäcker de fordon i varje video, sedan bygger de korta banor för varje bil inom en enskild kameras vy. Först efter att ha granskat långa inspelade videosekvenser försöker de "sy ihop" dessa banor över kameror med hjälp av tung dataklustering och handgjorda regler om vägarnas utformning och kamerornas positioner. Denna offline-, efterhandsmetod är långsam, kräver mycket beräkningskraft och har svårt när trafikscener förändras, kameror flyttas eller nya vinklar läggs till. Den har också problem när kameror ser fordon i mycket olika storlekar och vinklar, vilket kan få samma bil att se ut som två helt olika.
Ett nytt sätt: spåra allt i realtid
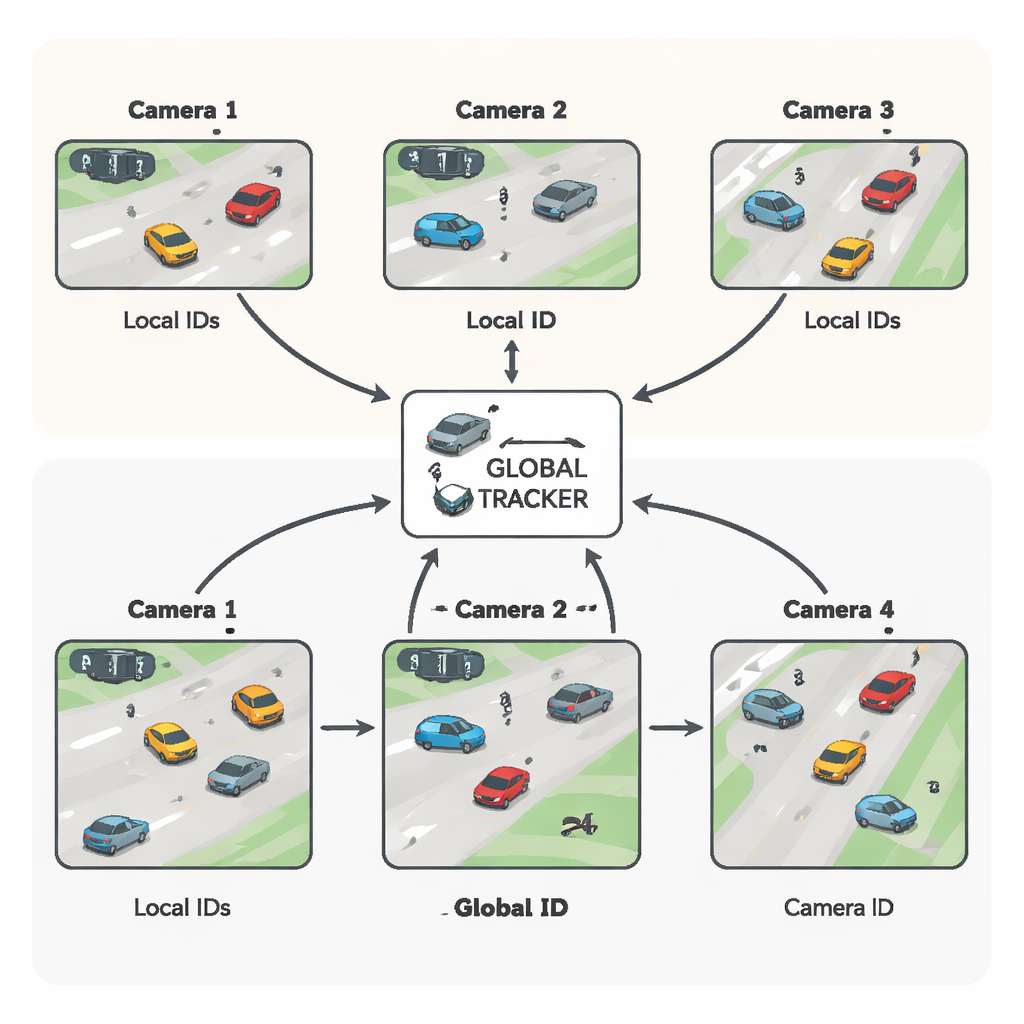
Forskarna föreslår en ny ramverk kallat Dynamic Global Tracking, eller DGT, som är designad från grunden för realtidsbruk. Istället för att vänta tills all video är insamlad och sedan försöka länka fordonens banor, bygger DGT dessa länkar i farten. Varje kamera upptäcker fortfarande fordon och bygger korta in-kamera-spår, men så fort dessa spår uppdateras jämförs de omedelbart med spår från andra kameror. En klassisk matchningsalgoritm används för att avgöra om två spår från olika vyer tillhör samma bil. Denna online, stegvisa process ersätter massiv klustring över all tidigare data, minskar beräkningsbehovet och gör det möjligt att hänga med i live-trafik.
Att se samma bil från olika vinklar
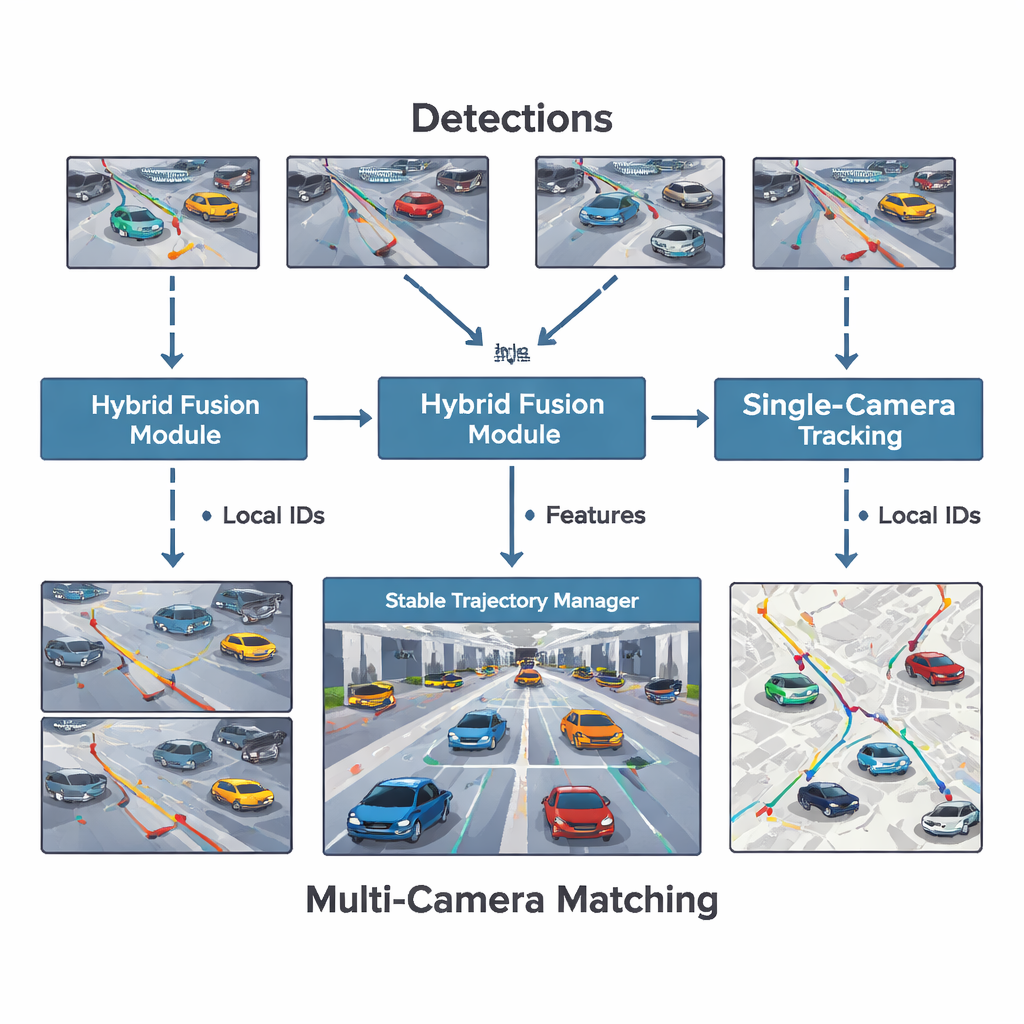
En stor utmaning är att samma fordon kan framstå som stort och detaljerat i en kamera och pyttelitet och suddigt i en annan, eller vara belyst olika i en tunnel jämfört med en öppen väg. För att hantera detta inkluderar DGT en Hybrid Fusion-modul som blandar fina detaljer och bredare kontext från varje bild. Den bearbetar kameraramarna på två sätt samtidigt: en gren fokuserar på skarpa, småskaliga detaljer som kanter och texturer, medan den andra grenen fokuserar på mer globala mönster och kontext. Systemet kombinerar sedan båda vyerna till en enda, stabil beskrivning av fordonets utseende. Tester visar att detta tillvägagångssätt håller systemets förtroende högt, även när bilens storlek eller tydlighet ändras kraftigt mellan kamerorna.
Hålla spåren stabila och pålitliga
DGT introducerar också en Stable Trajectory Manager, som fungerar som ett kvalitetskontrollcenter för spårningsbeslut. Den filtrerar bort osäkra detektioner, hanterar hur länge en bil kan försvinna bakom ett annat fordon eller hinder innan den betraktas som "borta", och tar bort objekt som inte rör sig över tid, såsom parkerade bilar eller vägskydd. Noggrant valda tids- och rörelsetrösklar gör att systemet kan skilja mellan en bil som kortvarigt döljs i en tunnel och en som faktiskt lämnat scenen eller flyttat in i en annan kamera. Tillsammans hjälper dessa regler att upprätthålla konsekventa ID:n för varje fordon och minskar plötsliga hopp, förluster eller felaktiga sammanslagningar mellan spår.
Vad detta betyder för vardagsvägar
I storskaliga tester på både en kinesisk motorvägstunnel och en livlig amerikansk stadskorsning uppnådde DGT hög noggrannhet samtidigt som det körde snabbt nog för realtidsanvändning. Till skillnad från många tidigare system som var anpassade för en typ av scen, hanterade DGT både överlappande och icke-överlappande kameravyer utan att behöva detaljerad manuell information om vägarnas utformning. För förare och stadsbor innebär denna typ av robust, flexibel spårning att trafikcentraler kan reagera snabbare på olyckor, köbildning eller onormalt beteende genom att använda en tydligare, mer kontinuerlig bild av hur fordon rör sig genom nätverket av vägar och kameror.
Citering: Chen, X., Chan, S., Bin, G. et al. Dynamic global tracker for online multi camera multi vehicle tracking. Sci Rep 16, 6101 (2026). https://doi.org/10.1038/s41598-026-35768-z
Nyckelord: flerkameraspårning av fordon, intelligenta transportsystem, trafikövervakning i realtid, datorseende, smarta städer