Clear Sky Science · sv
YOLO11-WLBS: en effektiv modell för upptäckt av vägskador
Varför bättre väginspektioner spelar roll
Varje spricka och potthål i vägbanan är mer än bara fult att se på—det kan förkorta beläggningens livslängd, skada fordon och bidra till olyckor. I dag inspekteras många vägar fortfarande av personer som kör långsamt med skrivblock eller enkla kameror, vilket är tidskrävande, dyrt och lätt att göra fel med. Denna studie presenterar YOLO11‑WLBS, ett smartare, lättare datorseendesystem som kan upptäcka olika typer av vägskador i realtid, även på en smartphone eller drönare, och som lovar snabbare och säkrare underhåll av våra vägnät.
Från långsamma patruller till smarta kameror
När trafiken ökar och vägnäten expanderar blir defekter som tvärgående och längsgående sprickor, alligatorsprickor, snedställda sprickor, potthål och lagningar allt vanligare. Traditionell inspektion—gående eller körande undersökningar eller enkel bildbehandling—är starkt beroende av mänskligt omdöme och har svårt i dåligt ljus eller röriga scener. Under det senaste decenniet har djupinlärning och i synnerhet YOLO-familjen av objektupptäcktssystem förändrat bildanalys genom att direkt lära mönster från råa bilder. Tidigare YOLO‑baserade vägssystem förbättrade noggrannheten men stod fortfarande inför en grundläggande avvägning: modeller som var tillräckligt precisa var ofta för stora och långsamma för realtidsanvändning på drönare, fordon eller handhållna enheter.
En fintuned motor byggd på YOLO11
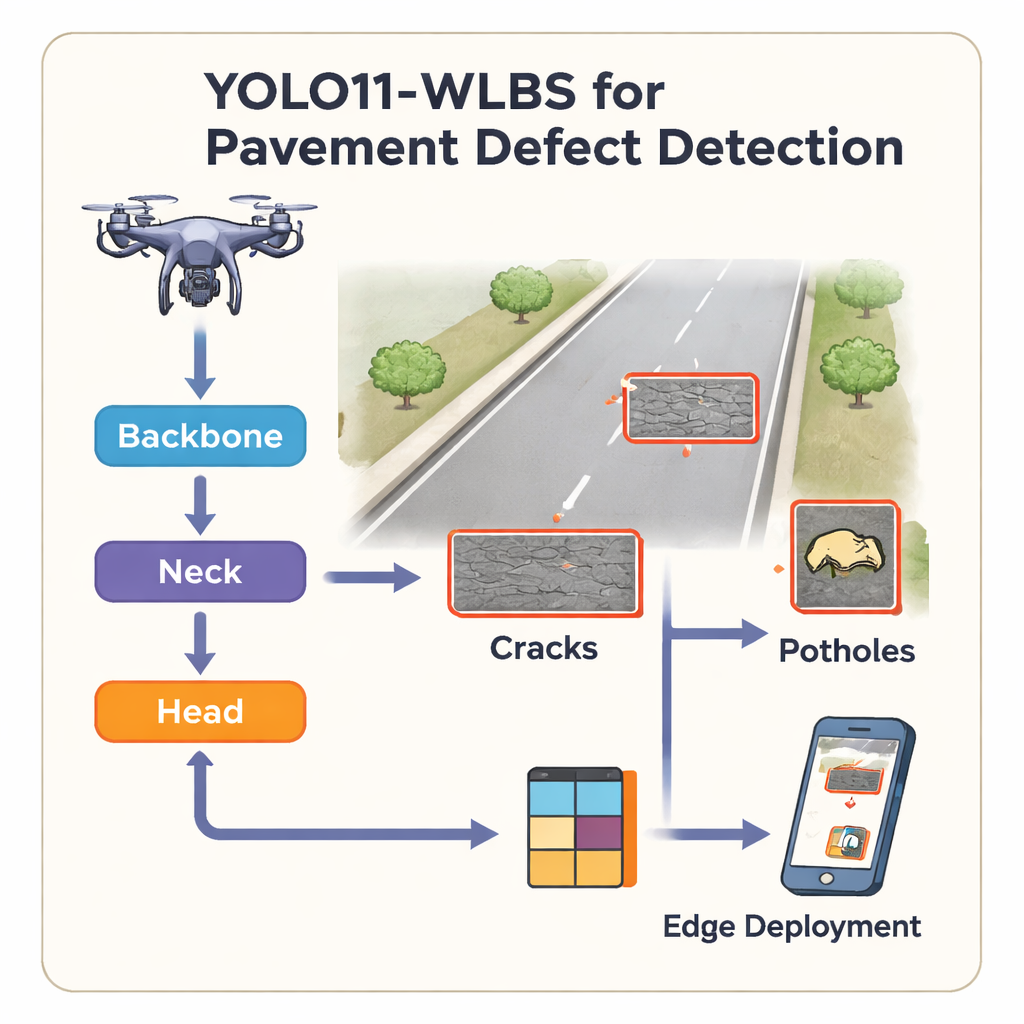
Författarna utgår från YOLO11, ett modernt objektupptäcktsnätverk som redan väger upp hastighet och noggrannhet, och skräddarsyr det för de särskilda utmaningarna hos vägbanor. Deras förbättrade modell, kallad YOLO11‑WLBS, behåller den vanliga tre‑stegsarkitekturen—"backbone" för funktionsutvinning, "neck" för att kombinera information i olika skalor och "head" för att rita rutor och etiketter runt defekter—men lägger till fyra noga utvalda förbättringar. Tillsammans skärper dessa till modellens förmåga att upptäcka tunna sprickor, förbättrar hanteringen av olika skadorstorlekar och minskar onödig beräkning så att den kan köras effektivt på edge-enheter.
Fyra smarta knep för att se sprickor
Den första förbättringen använder vågformsbaserad konvolution för att framhäva högfrekventa detaljer—de snabba ljusförändringar som markerar sprickor och små hål—utan att göra modellen större. Detta hjälper systemet att upptäcka svaga, tunna eller oregelbundna defekter som vanliga filter kan missa. Därefter omorganiserar ett "lättviktigt adaptivt extraktionssteg" funktionskartorna så att nätverket fokuserar sin kraft på de mest informativa kanalerna samtidigt som det totala antalet parametrar minskas med omkring en fjärdedel. Ett tvåvägs funktionspyramid (bidirectional feature pyramid) låter information flöda upp och ner mellan grova och fina skalor, vilket förbättrar igenkänningen av både små sprickor och större, sammanhängande sprickmönster. Slutligen framhäver en enkel uppmärksamhetsmekanism de viktigaste regionerna i varje funktionskarta och vägleder detektorn mot verkliga defekter och bort från distraktioner som vägmarkeringar, skuggor eller fläckar.
Bevis för att det fungerar i verkligheten
För att testa YOLO11‑WLBS tränade och utvärderade teamet modellen på högupplösta drönarbilder av verkliga vägbanor, med mer än tio tusen annoterade defekter i sex kategorier. Jämfört med ursprungliga YOLO11 ökar den nya modellen precisionen från 0,853 till 0,947 och återkallningen från 0,698 till 0,895, vilket innebär att den både ger färre falska larm och missar betydligt färre defekter. Dess totalt upptäcktsresultat (mAP@0.5) stiger med 12,2 %, samtidigt som antalet parametrar minskar med cirka 25,5 %. Systemet förblir robust vid både lågt och starkt ljus samt när bilder är suddiga eller nedprovade, och det generaliserar väl till en separat drönardataset med andra synvinklar och lägre upplösning. Författarna deployerar till och med en fullt kvantiserad version på en Android‑smartphone, som når nära 30 bilder per sekund för live‑video‑detektion av flera spricktyper.
Vad det betyder för förare och städer
Enkelt uttryckt är YOLO11‑WLBS ett snabbare, skarpare par ögon för våra vägar. Genom att kombinera bättre kantdetektion, smartare användning av modellkapacitet, multiskalefusionsfunktioner och lättviktig uppmärksamhet hittar den fler defekter samtidigt som den körs på modest hårdvara som drönare och telefoner. Det gör det praktiskt att ofta skanna långa vägsträckor, upptäcka problem tidigt och planera reparationer mer effektivt—allt utan att behöva skicka stora team ut i trafiken. Även om modellen fortfarande har svårigheter med sällsynta defekter som potthål—främst eftersom det finns färre exempel att lära sig från—ger den en stark grund för framtida system som inte bara upptäcker var vägen är skadad utan också uppskattar skadegraden, vilket hjälper städer att styra mot säkrare och mer kostnadseffektivt underhåll.
Citering: Lin, J., Wang, P., Ruan, Y. et al. YOLO11-WLBS: an efficient model for pavement defect detection. Sci Rep 16, 5284 (2026). https://doi.org/10.1038/s41598-026-35743-8
Nyckelord: upptäckt av vägskador, upptäckt av vägkrackor, YOLO11-WLBS, droninspektion, edge AI