Clear Sky Science · sv
Utforska havsdjupen: avslöja dolda skatter med IoT och ett ensemblebaserat djupt hybridinlärningsmodell
Varför bottenforskning får en högteknologisk uppgradering
Djuphavet och marken under det rymmer kablar, rörledningar, fornlämningar och känsliga ekosystem. Suddigt vatten, virvlande sand och svaga signaler gör det ändå förvånansvärt svårt att se vad som finns där nere. Denna artikel beskriver ett nytt sätt att kombinera många typer av sensorer med artificiell intelligens så att undervattensrobotar och övervakningssystem kan upptäcka viktiga objekt mer exakt, snabbare och med mindre energiförbrukning. Arbetet kan hjälpa till att skydda marin natur, säkra infrastruktur och öppna nya fronter för utforskning.
Många sensorer, en gemensam bild av djupet
Dagens utrustning för undervattensdetektion lutar ofta mot ett enda sinne: ett sonarutslag, en videokamera eller en typ av marksensor. Var och en fungerar bra under idealiska förhållanden, men de sviktar när vattnet blir grumligt, ljuset dämpas eller brus tränger in. Forskarna föreställer sig istället havet som en plats bevakad av ett Internet of Things: små, nätverkade enheter som lyssnar, ser och känner på olika sätt. Deras system smälter samman data från kameror, markpenetrerande radar, seismiska vibrationssensorer, termiska sonder och elektromagnetiska detektorer till en gemensam ström för analys. Genom att blanda dessa vyer kan systemet fortfarande känna igen ett föremål även när en sensor förvirras av lera, bubblor eller reflektioner. 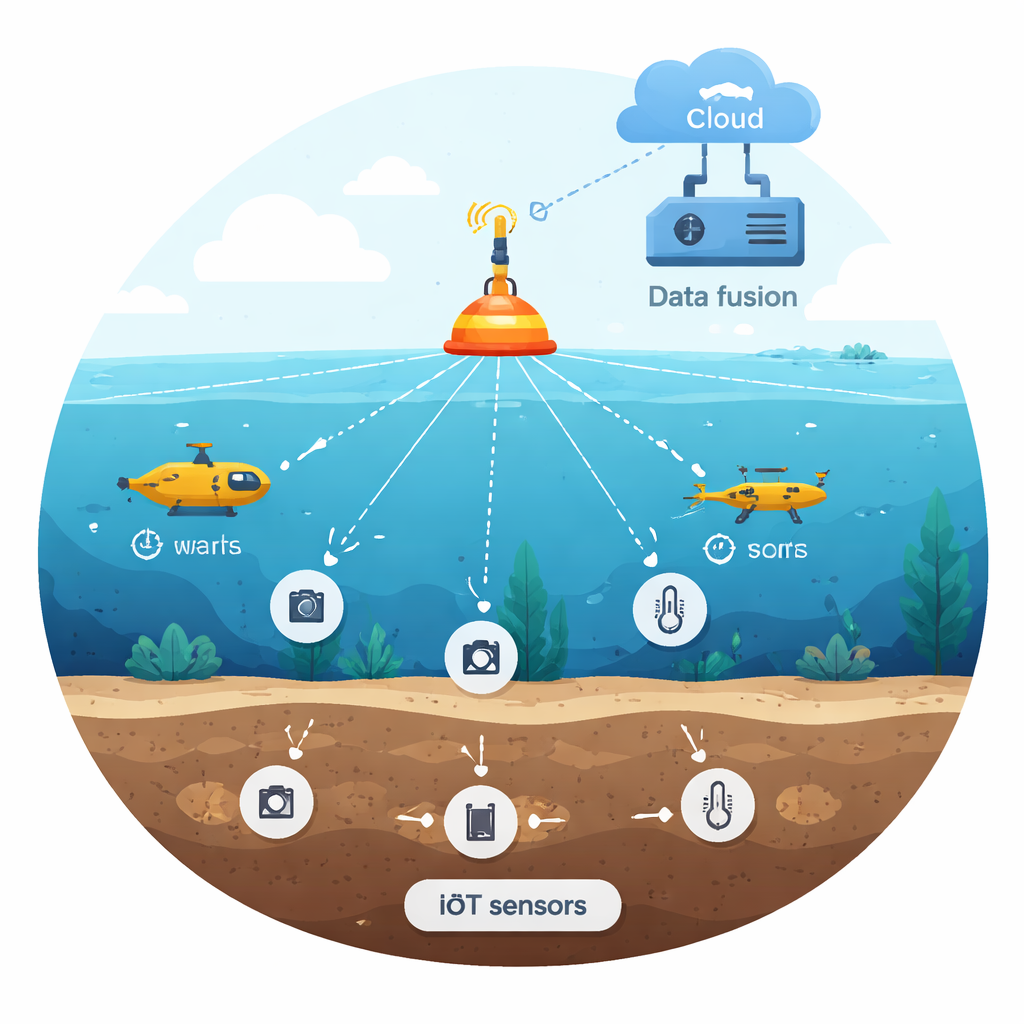
Rensa röriga signaler innan de når hjärnan
Rådata som samlas in under vattnet är långt ifrån perfekt. Den är prickig av slumpmässiga toppar, luckor och konstiga avläsningar från skiftande strömmar, rörliga djur och elektroniska störningar. Innan någon smart algoritm fattar beslut kör författarna denna data genom en noggrann rengöringskedja. De använder medianfilter för att jämna ut plötsligt brus utan att sudda ut verkliga detaljer, statistiska kontroller för att upptäcka och ta bort avvikare, och synkronisering så att avläsningar från olika enheter stämmer överens i tid. De reskalear också värden så att en stark sensor inte dränker svagare, transformerar endimensionella radarspår till bilder och använder moderna tekniker för att krympa hundratals mätvärden till en mindre, mer informativ uppsättning. Allt detta är utformat för att inlärningssystemet ska se en skarp bild i stället för en kaotisk oskärpa.
En hybridinlärningsmotor som ser mönster och fattar beslut
I hjärtat av metoden finns vad författarna kallar en Ensembled Deep Hybrid Learning (EDHL)‑modell. Den har två huvuddelar som spelar kompletterande roller. Först fungerar ett Inception‑liknande djupt neuralt nätverk som ”ögon”, skannande sensorsbilder i flera skalor samtidigt för att fånga både fina detaljer, som en kabel, och större former, som en klippavsats. Därifrån producerar det rika numeriska beskrivningar av varje scen. För det andra fungerar en gradient‑boosting‑klassificerare som ett ”beslutskommitté”. Den bygger många små beslutsträd som var och en rättar de andras misstag och gradvis närmar sig rätt svar om vilket objekt som är närvarande. Ett steg för funktionsurval väljer endast de mest informativa signalerna, vilket minskar minnesbehovet och snabbar upp det slutliga systemet utan att kasta bort det som är viktigast. 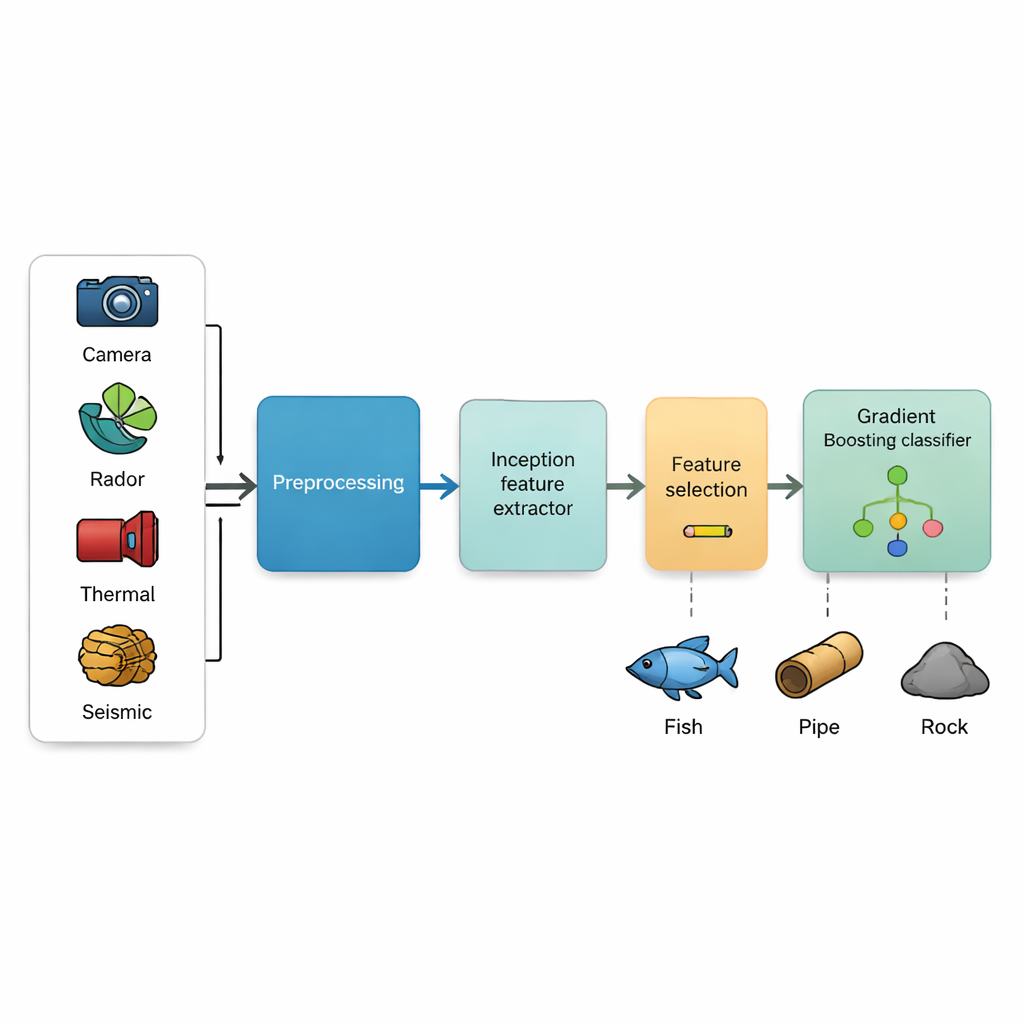
Sätta systemet på prov
För att se om deras design fungerar i praktiken tränade och utvärderade teamet den med en stor offentlig samling undervattensbilder som innehåller fiskar, koraller, svampar, sjögräs, skal, leddjur och andra bottenmiljöer. De jämförde många varianter av datarensning och funktionsurval och ställde sin modell mot välkända djuplärandesystem som klassiska konvolutionsnätverk, ResNet, DenseNet, EfficientNet, kapselnätverk och till och med transformer‑baserade modeller. EDHL‑uppsättningen nådde, särskilt i kombination med noggrann bortfiltrering av brus och korrelationsbaserat funktionsurval, en noggrannhet över 98 %, med betydligt färre falsklarm och missade objekt än sina konkurrenter. Viktigt är att den bibehöll denna höga prestanda samtidigt som den kördes på måttlig hårdvara liknande den som kan användas på edge‑enheter, inte bara kraftfulla laboratorieservrar.
Vad detta betyder för framtida havsutforskning
För icke‑specialister är slutsatsen att författarna byggt ett smartare ”känna‑och‑tänka”‑system för undervattensvärlden. Genom att förena olika IoT‑sensorer med en hybridinlärningsmotor visar de att det är möjligt att upptäcka och klassificera bottenobjekt mycket tillförlitligt utan att behöva klumpiga datorer eller perfekta siktförhållanden. I framtiden skulle denna typ av teknik kunna hjälpa flottor av undervattensrobotar att kartlägga havsbotten, övervaka känsliga habitat, spåra föroreningar och inspektera begravd infrastruktur med färre fel och lägre energianvändning. Den förvandlar den röriga, fientliga miljön i djupet till en plats där digitala sinnen äntligen kan se tillräckligt klart för att låsa upp dess dolda skatter.
Citering: Tada, S., Jeevanantham, V. Exploring oceanic depths: unveiling hidden treasures with IoT and ensembled deep hybrid learning model. Sci Rep 16, 5333 (2026). https://doi.org/10.1038/s41598-026-35634-y
Nyckelord: detektering av undervattensobjekt, IoT‑sensorer, djuplärande, marin utforskning, multimodal avkänning