Clear Sky Science · sv
Design och implementation av styrning för en 6-DoF robotarm med objektdetektion baserad på maskininlärning med mini-mikrokontroller
Smartare robotarmar till lägre kostnad
Föreställ dig en fabriksrobotarm som kan upptäcka ett föremål, avgöra hur den ska greppa det och röra sig smidigt på plats — allt utan att vara beroende av en klumpig dator eller molnanslutning. Denna artikel beskriver precis det: en sexleder (6-DoF) robotarm som ser och tänker med hjälp av en liten, kostnadseffektiv mikrokontroller. För läsare intresserade av hur artificiell intelligens lämnar datacentret och flyttar in i vardagliga maskiner visar detta arbete hur avancerad vision och styrning kan köras på hårdvara inte mycket större än ett USB-minne.
Varför det spelar roll att krympa robothjärnor
Traditionella industrirobotar är ofta beroende av kraftfulla externa datorer för att känna igen objekt och planera rörelser. Det ökar kostnader, kablage och teknisk komplexitet, vilket kan utgöra ett hinder för små och medelstora företag. Författarna ville visa att en enda billig mikrokontroller skulle kunna göra nästan allt: se objekt, avgöra var de befinner sig i 3D, planera hur armen ska röra sig och styra motorerna som genomför uppgiften. Genom att hålla beräkningarna ombord blir systemet mer portabelt, mer energieffektivt och enklare att distribuera i trånga eller föränderliga miljöer, från små fabriker till undervisningslaboratorier.
En flexibel arm som bygger sig själv
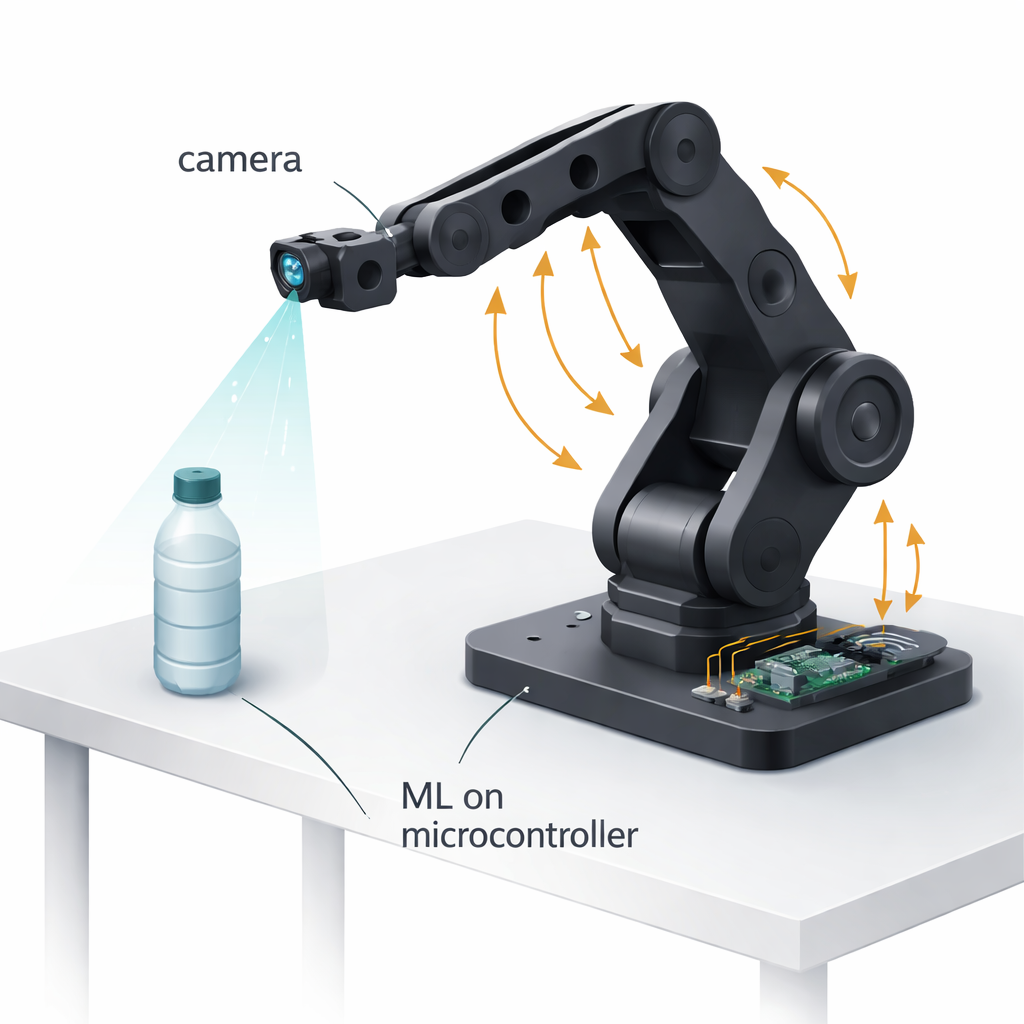
Teamet designade en sexledad robotarm från grunden med mestadels 3D-utskrivna plastdelar för att hålla den lätt och prisvärd. Högmomentiga hobbyservo-motorer driver varje led, och forskarna modifierade dessa motorer för att läsa tillbaka sina exakta vinklar i realtid, vilket möjliggör precis slutet-loopen-styrning. Ett specialbyggt tvåfingersgrepp i spetsen innehåller en enkel strömsensor: genom att övervaka hur mycket elektrisk ström greppmotorn drar kan systemet avgöra hur hårt den klämmer och automatiskt justera greppet för att hålla objekt stadigt utan att krossa eller tappa dem. Monterad på armens "handled" sitter en liten full-HD-kamera som rör sig med armen och ger systemet ett förstapersonsperspektiv på scenen framför greppet.
Lära en liten krets att se flaskor
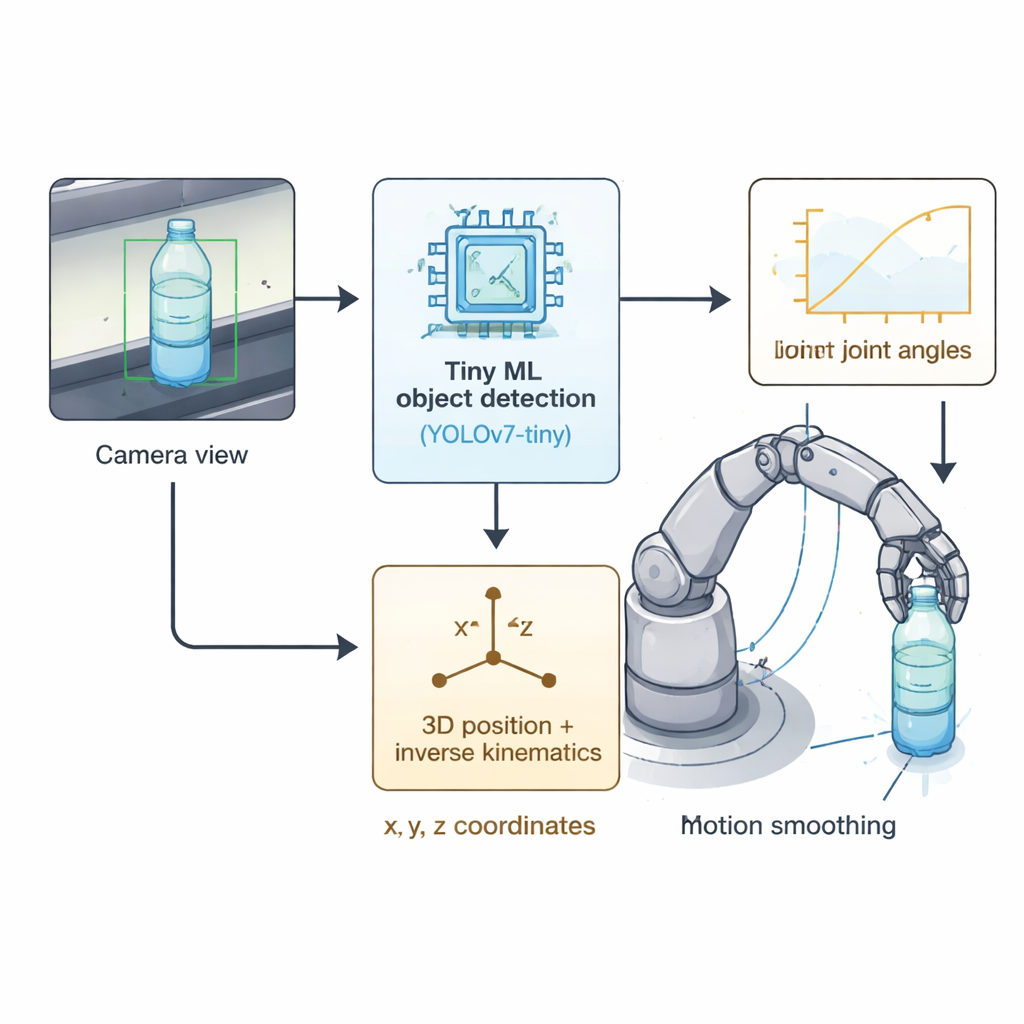
I hjärtat av systemets syn finns en kompakt version av ett populärt objektdetektionsnätverk kallat YOLOv7-tiny. Forskarna tränade denna modell på mer än 2 500 bilder av plastvattenflaskor fångade under ett brett spektrum av ljusvinklar, avstånd och partiella ocklusioner. Efter träning på ett kraftfullt grafikkort komprimerade de modellen till en 8-bitars "tiny ML"-form så att den skulle få plats i den begränsade minnes- och beräkningskapaciteten hos AMB82-Mini-mikrokontrollern. Även i denna avskalade form uppnådde modellen cirka 88 % noggrannhet vid att upptäcka flaskor och kördes tillräckligt snabbt — runt 7–8 bildrutor per sekund — för realtidens plock-och-placera-arbete direkt på mikrokontrollern, utan hjälp av PC eller moln.
Från pixlar till precis rörelse
När kameran har upptäckt en flaska beräknar systemet mitten av detekteringsrutan i bilden och uppskattar avståndet baserat på hur stor den framstår i pixlar. Det ger x-, y- och z-koordinater i rummet. En specialanpassad matematisk lösare översätter sedan dessa koordinater till de sex ledvinklar som armen måste nå, med standardrobotgeometri optimerad för att köras snabbt på den lilla processorn. Styrprogramvaran, organiserad som en enkel tillståndsmaskin, cyklar genom att hitta ett objekt, röra sig till det, stänga greppet med hjälp av strömsensorn som känsel, och sedan transportera objektet till en fast avlämningspunkt. För att hålla rörelserna smidiga och undvika skakningar använder teamet noggrant utformade rörelsekurvor med "easing" och en särskild metod för spänningsmodulering som minskar motorvibrationer och överskjutning.
Tester i verkliga förhållanden och vad de visar
I upprepade experiment visade det integrerade systemet att det pålitligt kunde plocka upp och placera plastflaskor på upp till 300 gram med 100 % lyckandefrekvens, och fortfarande prestera väl vid tyngre laster upp till 500 gram. Simulationer och mätningar visade att positioneringsfel typiskt låg runt en millimeter — tillräckligt bra för många sorterings- och förpackningsuppgifter. Jämfört med enklare styrscheman minskade författarnas motorstyrningsstrategi vibrationer, förkortade tiden det tog för armen att stabilisera sig och eliminerade ryckiga rörelser. Även om testerna fokuserade på en objekttyp och fasta avstånd i kontrollerade inomhusförhållanden, ger de övertygande bevis för att seriös robotperception och styrning kan paketeras i ett enda, mycket måttligt inbyggt kort.
Vad detta betyder för vardaglig automation
För icke-specialister är huvudpoängen att avancerade förmågor att "se" och "röra sig" inte längre begränsas till dyra, högpresterande robotar. Genom att kombinera små maskininlärningsmodeller, smart geometri och omsorgsfull motorstyrning på en lågkostnadsmikrokontroller visar detta arbete en väg mot kompakta, självständiga robotarmar som små tillverkare, skolor och hobbyister realistiskt kan ta i bruk. När framtida versioner utökas till fler objekttyper och mer varierade miljöer kan liknande inbyggda system tyst automatisera otaliga enkla plock-och-placera-jobb och göra intelligent robotik tillgänglig för långt fler människor och platser.
Citering: Almaliki, H.H., Mazinan, A.H. & Modaresi, S.M. Design and implementation of a 6-DoF robot arm control with object detection based on machine learning using mini microcontroller. Sci Rep 16, 6842 (2026). https://doi.org/10.1038/s41598-026-35508-3
Nyckelord: inbyggd robotik, tiny machine learning, styrning av robotarm, objektdetektion, industriell automation