Clear Sky Science · sv
Upptäckt av status vid arbetsyta i kolgruva baserat på YOLOv8-EST
Smartare ögon under marken
Moderna kolgruvor är fyllda med kraftfulla maskiner som arbetar i mörka, dammiga tunnlar där människors sikt är begränsad och säkerhetsmarginalerna är små. Denna studie presenterar ett nytt artificiellt intelligenssystem (AI), kallat YOLOv8-EST, som hjälper gruvor att kontinuerligt ”bevaka” arbetsytan—området där kol aktivt skärs bort—och automatiskt avgöra om nyckelmaskiner fungerar normalt. Genom att göra detta snabbt och noggrant på begränsade datorer på plats syftar systemet till att förbättra säkerhet och effektivitet utan att kräva ett rum fullt av högpresterande servrar.
Varför bevakning av arbetsytan spelar roll
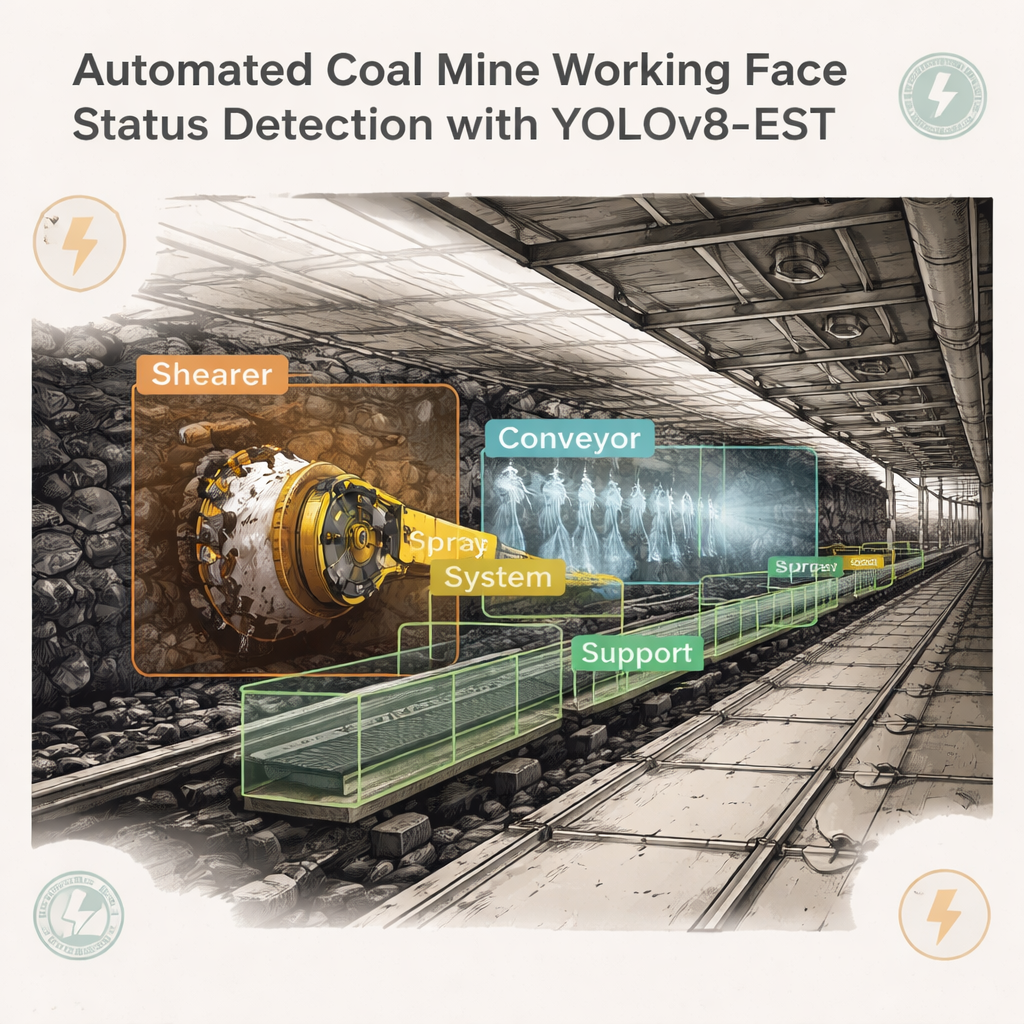
Kina är världens största kolproducent, och dess gruvor står under press att bli säkrare, renare och mer effektiva. Vid en fullt mekaniserad arbetsyta skärs kol från skiftet av en roterande skärtrommel, medan skrap- och bandtransportörer för bort materialet och sprutsystem dämpar damm. Om någon av dessa komponenter fallerar eller beter sig onormalt kan produktionen sjunka och olyckor inträffa. Traditionell övervakning förlitar sig i hög grad på arbetarnas erfarenhet och enkla sensorer, vilka har svårt att hantera förhållanden med svagt ljus, driftande damm, bländning och frekvent skymning av rörlig utrustning. Författarna definierar ”detektion av arbetsytans status” som realtidsidentifiering av normala och onormala tillstånd hos dessa nyckelkomponenter, med enbart video—en lockande väg mot verkligt intelligenta gruvor.
Begränsningar hos befintlig AI-vision i gruvor
Under de senaste åren har AI-baserad objektidentifiering gjort stora framsteg, särskilt med snabba system som YOLO-familjen (You Only Look Once). Dessa modeller kan upptäcka och märka många objekt i en bild på en bråkdel av en sekund. De flesta förbättringar i noggrannhet har dock kommit genom att göra nätverken djupare och tyngre, vilket kräver mer beräkningskraft än vad som vanligtvis finns vid arbetsytan. Alternativa detektorer som Faster R-CNN, RetinaNet, EfficientDet och transformerbaserade system kan vara mycket exakta, men de är ofta för långsamma eller kräver för mycket resurser för de tuffa och dynamiska underjordiska miljöerna. Dessutom är standardmodeller inte anpassade för de speciella visuella problemen i gruvor—extrema kontraster, virvlande damm, partiellt synliga maskiner och ständigt föränderliga bakgrunder.
En lätt men kraftfull detektionsmotor
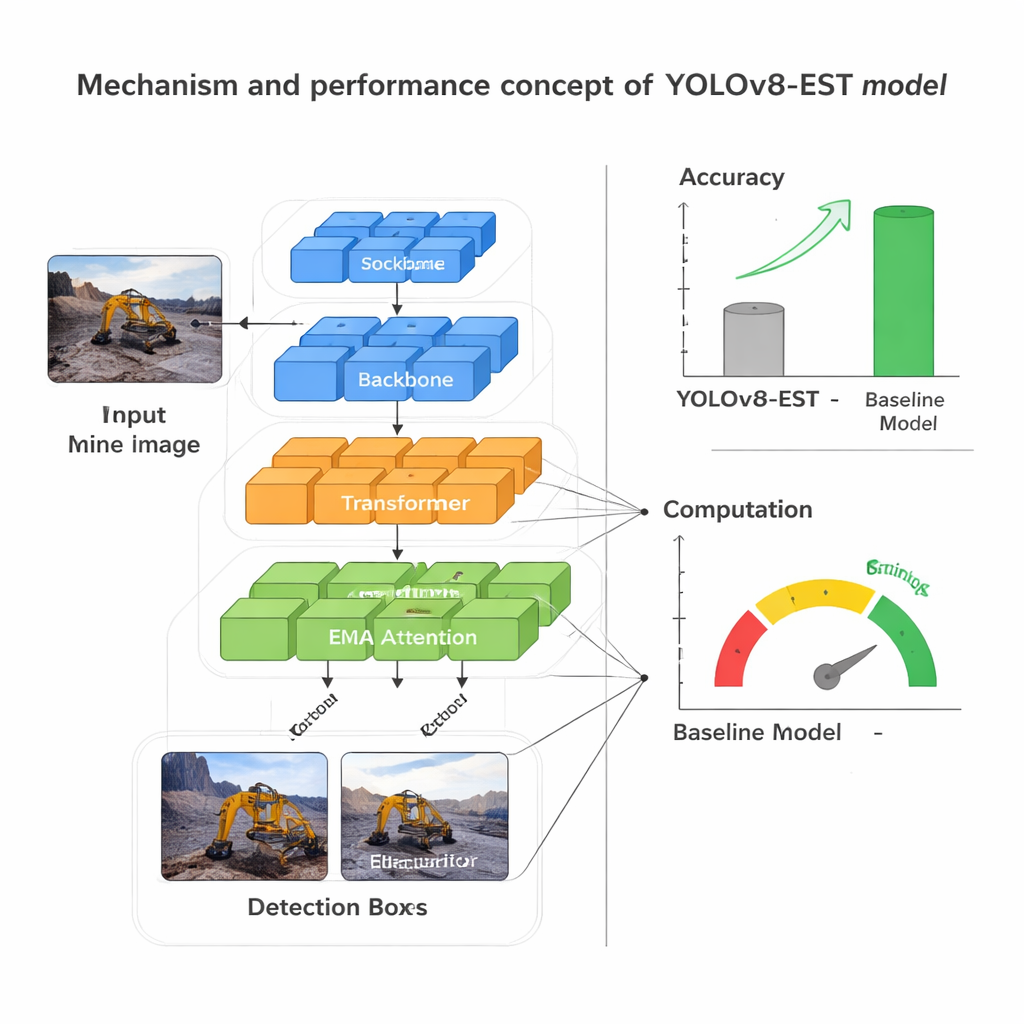
För att möta dessa begränsningar bygger forskarna vidare på YOLOv8, en modern realtidsdetektor, och redesignar den specifikt för kolbrytning och skapar YOLOv8-EST. Kärnidén är att lägga till smartare funktionella komponenter utan att göra modellen onödigt stor. För det första inför de Swin Transformer-block—moduler som använder attention inom små bildfönster och över förskjutna fönster—för att fånga både lokal detalj och längre räckviddmönster, såsom formen på en transportör eller konturen av ett skärverktyg. För det andra förbättrar de hur modellen förstår spatiala relationer genom att generera relativa positionskoder med ett litet djupt nätverk istället för enkla linjära formler, vilket hjälper modellen att avgöra till exempel om en sprutstråle är korrekt inriktad mot en skärtrommel. För det tredje introducerar de en modifierad aktiveringsfunktion kallad GELUS, som är matematiskt fininställd för att reagera mjukt men effektivt på den typ av brusiga, lågkontrastsignaler som är vanliga i gruvbilder—det minskar beräkningarna samtidigt som inlärningen hålls stabil. Slutligen använder en EMA-attentionmodul (exponentiellt glidande medelvärde) en strategi för att blanda aktuell och tidigare funktionsinformation, vilket hjälper nätverket att fokusera på verkligt viktiga regioner och dämpa brusiga, fladdrande bakgrunder.
Systemet på prov
Teamet sammanställde en dedikerad bilddatamängd från en fullt mekaniserad arbetsyta, kallad CM-datasetet, med 10 862 bilder. Dessa scener inkluderar maskinkropp, skärtrommel, skraptransportör, bandtransportör och sprutsystem under olika ljus- och dammförhållanden. De delade upp data i tränings-, validerings- och testuppsättningar och grupperade också bilder i svagt ljus/högt damm, medium och normala förhållanden för att testa robusthet. Med standardmått—precision, recall och medelvärdesprecision (mAP)—jämförde de YOLOv8-EST med lättare modeller som YOLOv3-tiny och SSD-Mobilenetv2, mainstream-modeller som YOLOv5 och YOLOv8, tyngre tvåstegsdetektorer som Faster R-CNN och RetinaNet, samt transformerbaserade designer inklusive DETR och RT-DETR. I dessa tester levererade YOLOv8-EST den bästa balansen: omkring 98 % precision och recall samt mycket hög mAP, samtidigt som modellen hölls kompakt nog för realtidsanvändning på ett enda industrigrafikkort.
Vad detta innebär för gruvsäkerhet
För icke-specialister är huvudresultatet att denna forskning förvandlar rå, grumlig video från underjorden till tillförlitliga, automatiska statusrapporter om kritisk gruvutrustning. Istället för att be arbetare visuellt bevaka svaga skärmar fyllda av damm och rörelseoskärpa kan YOLOv8-EST flagga när en transportör stannar, en trommel inte är där den ska vara eller ett sprutsystem är inaktivt—och göra det med nästan mänsklig noggrannhet dygnet runt. Genom att noggrant anpassa moderna AI-tekniker för effektiv drift vid arbetsytan—istället för enbart i avlägsna datacenter—erbjuder systemet en praktisk väg till säkrare, stabilare och mer intelligent kolproduktion.
Citering: Wang, H., Wu, G., Yang, Q. et al. Working face status detection in coal mine based on YOLOv8-EST. Sci Rep 16, 7787 (2026). https://doi.org/10.1038/s41598-026-35452-2
Nyckelord: kolgruvasäkerhet, objektidentifiering, datorseende, djupinlärning, industriell automatisering