Clear Sky Science · sv
Super-twisting-algoritmbaserad fuzzy sliding mode-styrning för descriptor T-S fuzzy-system
Få komplexa system att uppföra sig
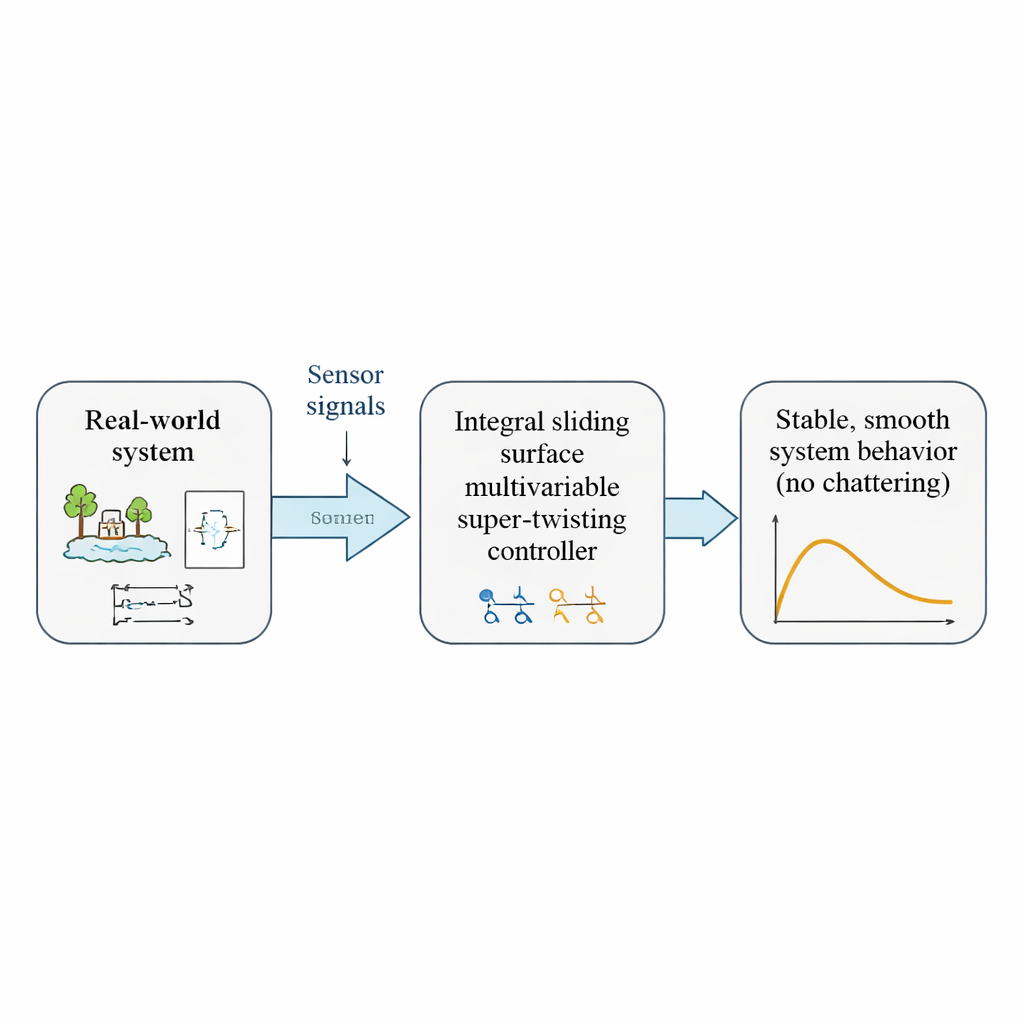
Från förvaltning av fiskbestånd till att hålla elnät och elektroniska kretsar stabila beter sig många verkliga system på komplicerade, icke-linjära sätt. Ingenjörer använder avancerade styralgoritmer för att hålla sådana system säkra och effektiva, även när de utsätts för störningar och osäkerhet. Denna artikel presenterar en ny styrstrategi som tämjer dessa svårstyrda system på ett mjukare sätt, och undviker den hårda, snabba växling som kan skada utrustning och försämra prestanda.
Varför vissa system är svåra att styra
Många praktiska system styrs inte bara av differentialekvationer som beskriver hur kvantiteter förändras över tid, utan också av algebraiska samband som måste vara uppfyllda vid varje ögonblick. Dessa så kallade descriptor-system förekommer inom ekonomi, kraftnät, mekaniska kopplingar och biologiska modeller. För att hantera deras icke-linjära beteende använder forskare ofta Takagi–Sugeno (T-S) fuzzy-modeller, som representerar ett komplext system som en blandning av enklare linjära delar som är giltiga i olika driftområden. Trots sin styrka har detta ramverk länge lidit av ett tekniskt hinder: de flesta styrmetoder antog förhandskunskap om hur de fuzzy ’medlemskapsfunktionerna’ förändras över tid, även om dessa förändringar i själva verket beror på det okända framtida beteendet hos systemet och dess regulator.
En mjukare typ av robust styrning
Sliding mode-styrning är en populär robust styrmetod känd för sin förmåga att snabbt tvinga ett system till en önskad bana och hålla det där trots störningar. Den gör detta genom att växla styrsignalen på ett sätt som motverkar osäkerhet. Den snabba växlingen kan dock orsaka ”chattering” — högfrekventa svängningar som är oönskade eller till och med skadliga i mekaniska och elektriska system. Super-twisting-algoritmen, en mer avancerad form av sliding mode, döljer växlingen i en intern process och åstadkommer en kontinuerlig styrsignal som bibehåller robustheten samtidigt som chattering reduceras. Hittills var denna teknik huvudsakligen begränsad till enkelinsats-system eller krävde att flerinsats-system dekomponerades i många separata regulatorer, vilket är beräkningsmässigt betungande.
En ny glidyta utan dolda antaganden
Författarnas första nyckelbidrag är en ny typ av ”integral” glidyta utformad särskilt för descriptor T-S fuzzy-system. Enkelt uttryckt är denna yta en matematisk villkor som involverar både systemets nuvarande och ackumulerade tidigare beteende. Genom en smart konstruktion visar författarna att de kan garantera det önskade beteendet när systemet väl ligger på denna yta, utan att behöva några förhandsgränser för hur de fuzzy medlemskapsfunktionerna förändras. Det tar bort ett begränsande antagande som har hindrat tidigare metoder. Analysen använder noggrant valda energi-liknande funktioner för att bevisa att systemets beteende på glidytan förblir stabilt över tid.
En multivariabel super-twisting-regulator
Med utgångspunkt i denna glidyta utvecklar artikeln en multivariabel version av super-twisting-algoritmen. Istället för att utforma en regulator per insignal eller per glidvariabel behandlar metoden alla tillsammans i matrisform. Det gör den bättre lämpad för system där olika tillstånd är starkt sammanlänkade, såsom interagerande arter i ett ekosystem eller strömmar och spänningar i en krets. Författarna härleder villkor för hur regulatorns vinster ska väljas så att systemets tillstånd når glidytan omedelbart och sedan konvergerar på ändlig tid. Eftersom styrsignalen är kontinuerlig snarare än skarpt växlande undertrycks chattering av design, samtidigt som robustheten mot störningar bevaras.
Bevisa idén i biologi och elektronik
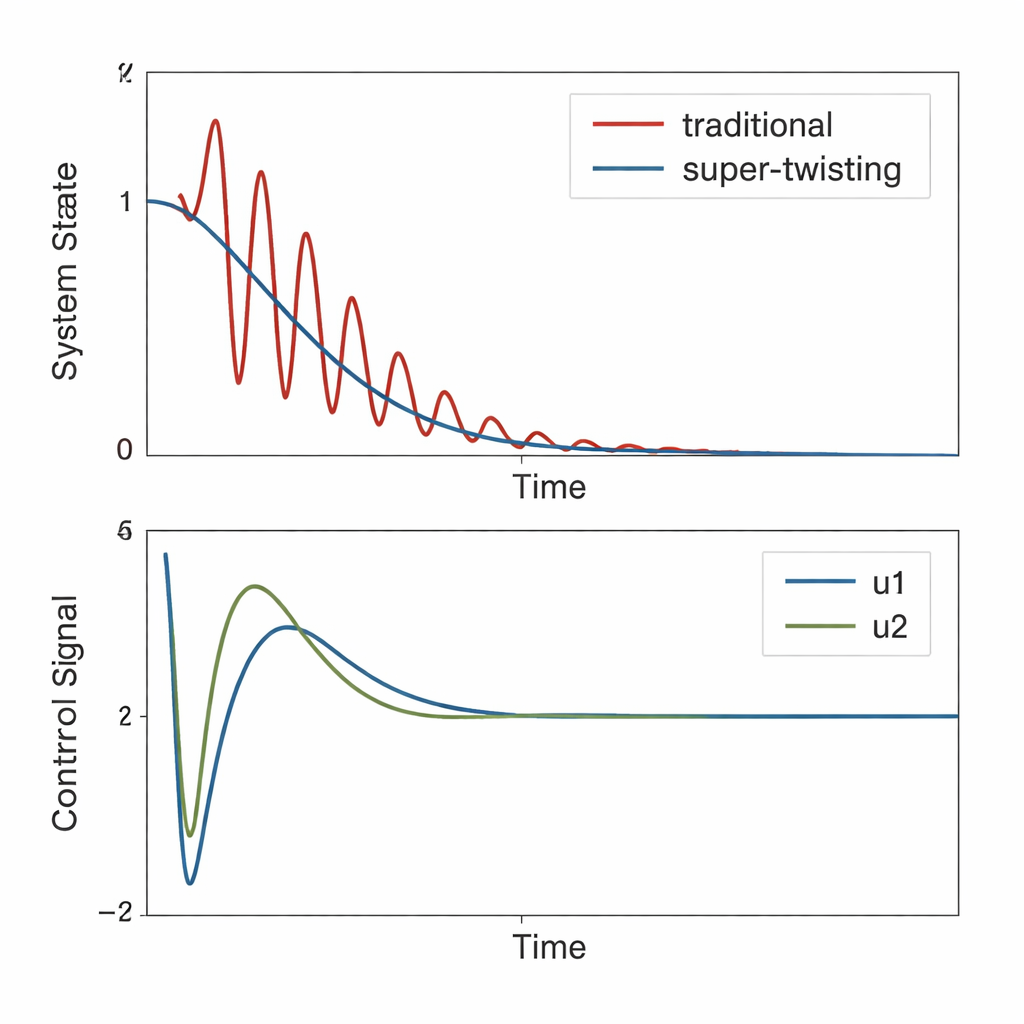
För att visa metodens praktiska användbarhet tillämpar författarna den på två olika icke-linjära descriptor-system. Den första modellerar ett bioekonomiskt scenario med omogna och mogna populationer av en art, tillsammans med en variabel som fångar reproduktiv kapacitet och förvaltningsåtgärder som fångst och reglering. Det andra exemplet är en icke-linjär tunneldiodkrets, en klassisk testbädd inom elektronik. I båda fallen visar simuleringar att den föreslagna regulatorn stabiliserar systemets tillstånd snabbt och håller glidvariablerna nära noll, vilket indikerar precis följning av det önskade beteendet. Jämfört med traditionella sliding mode-regulatorer minskar den nya metoden avsevärt svängningarna både i systemets respons och i styrsignalerna.
Vad detta betyder i praktiken
För icke-experter är huvudbudskapet att detta arbete erbjuder ett sätt att hålla komplexa, begränsade och osäkra system under kontroll utan den våldsamma växling som plågat vissa robusta metoder. Genom att kombinera fuzzy-modellering, en integral glidyta och en multivariabel super-twisting-algoritm utformar författarna regulatorer som både är matematiskt garanterat stabila och praktiskt sett mjukare i drift. Detta kan gynna tillämpningar som sträcker sig från ekologisk resursförvaltning till avancerad kraftelektronik och näverkskopplade styrsystem, särskilt när framtida arbete utvidgar dessa idéer till cybersäkra miljöer där kommunikationen kan störas av attacker.
Citering: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
Nyckelord: sliding mode-styrning, fuzzy-system, robust styrning, icke-linjär dynamik, super-twisting-algoritm