Clear Sky Science · sv
Robust modellreferens-adaptiv regulator för 3-DOF plan manipulator
Smartare robotarmar för tuffare uppgifter
Fabriksrobotarmar är oerhört snabba och precisa, men deras prestanda kan försämras när verkligheten inte beter sig som förväntat — laster förändras, detaljer placeras något annorlunda eller oväntade krafter rycker i armen. Denna artikel undersöker ett nytt sätt att hålla en vanlig treledad robotarm noggrann och stabil även när dess beteende är svårt att modellera exakt och när kraftiga störningar förekommer, vilket gör robotarna till mer tillförlitliga partners på fabriksgolvet.
Varför tre leder spelar roll i verkliga fabriker
Studien fokuserar på en trelänkad plan robot: tre styva segment förenade med vridbara leder som rör sig i ett plan. Trots enkelheten är denna konfiguration ryggraden i många industriella plock-och-placera-uppgifter, paketeringslinjer och monteringssystem. Utmaningen är att rörelsen i en led starkt påverkar de andra, och de underliggande ekvationerna som beskriver armens rörelse är högst icke-linjära och tätt kopplade. Traditionella regulatorer kan fungera väl när allt är känt och förutsägbart, men de får problem när robotens last ändras, när friktion eller massa inte är modellerade korrekt eller när externa störningar pressar armen ur kurs.
Bryta ner en komplex rörelse i enklare delar
För att tygla denna komplexitet härleder författarna först en detaljerad matematisk modell av robotens rörelse, inklusive hur länkarnas massor, ledvinklar och gravitation samverkar för att ge upphov till rörelse. De introducerar sedan en viktig förenkling: en "avkopplings"-strategi. Istället för att behandla roboten som ett ihoptrasslat trefaldigt system modelleras varje led som om dess acceleration främst beror på dess egen motortorque och hastighet. Resteffekterna — såsom interaktioner mellan leder, gravitationstermer och andra svårmodellerade influenser — paketeras ihop och behandlas som osäkerheter. Denna avkoppling gör det möjligt att dela upp styrproblemet i tre mindre, mer hanterbara delsystem, ett per led, samtidigt som man erkänner att det verkliga systemet under ytan är stökigt. 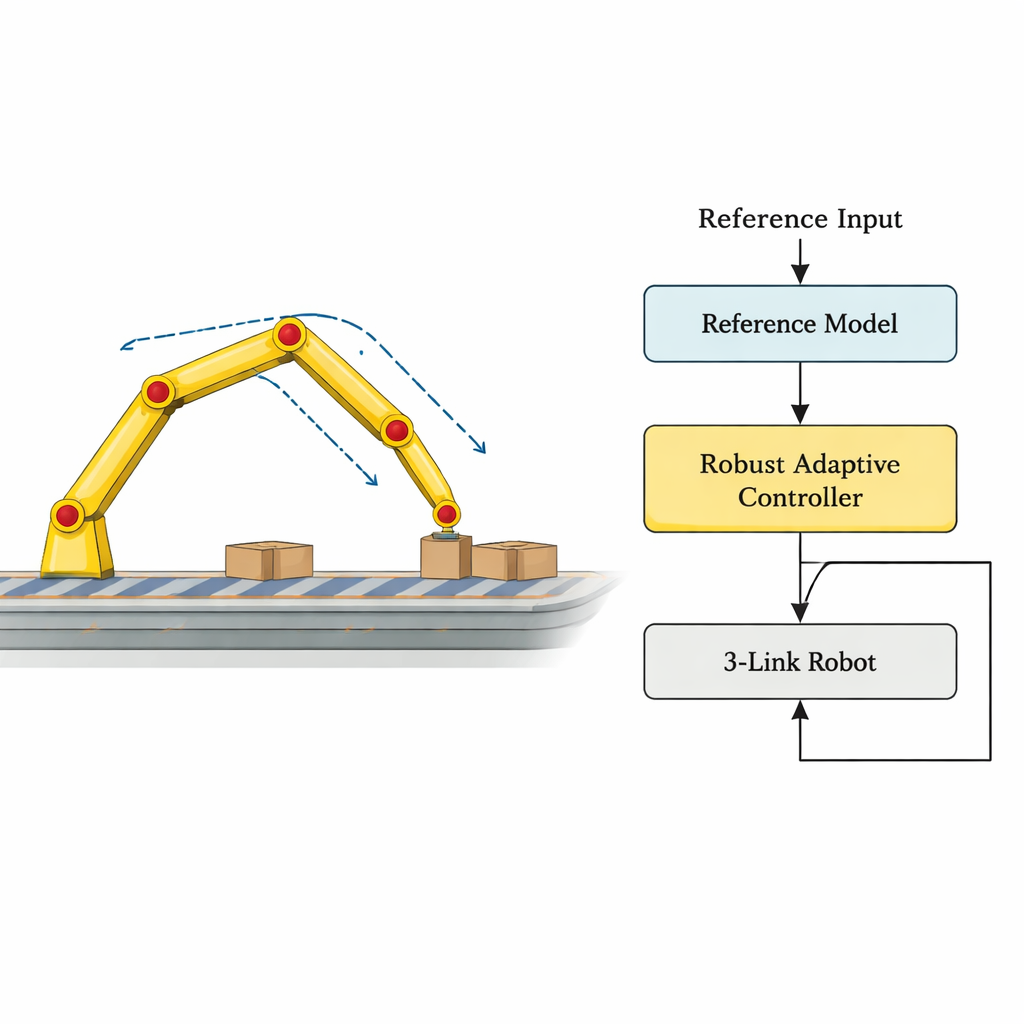
Lära roboten följa ett rörligt mål
På toppen av denna förenklade modell bygger författarna en modellreferens-adaptiv regulator (MRAC). Enkelt uttryckt definierar de först ett idealiskt beteende — en referensmodell som anger hur varje led bör röra sig över tiden vid en given kommando. Regulatorn jämför kontinuerligt robotens faktiska rörelse med detta ideal och justerar sina interna vinster i realtid för att minska differensen. Under perfekta förhållanden kan konventionell MRAC få roboten att nära nog följa referensen, men den har en allvarlig svaghet: vid ihållande störningar eller modelleringsfel kan de adaptiva vinsterna driva iväg till extrema värden, vilket leder till oscillationer, slöseri med energi och till och med förlust av stabilitet. Detta fenomen, kallat parameterdrift, gör vanlig MRAC riskfylld för verklig industriell användning.
Göra anpassningen robust, inte vårdslös
För att undvika denna drift utvecklar artikeln flera "robusta" varianter av MRAC som uttryckligen tar hänsyn till okända effekter. Författarna lägger till extra termer i anpassningslagarna som varsamt drar regulatorns vinster tillbaka mot säkra gränser eller skalar anpassningsinsatsen baserat på hur stor följningsfelet är. Bland de testade strategierna — kända som sigma-modifikation, fel-modifikation och en energi-medveten optimal kontrollmodifikation — framstår den sistnämnda som särskilt framgångsrik. Genom omfattande datorsimuleringar, inklusive snabba oscillerande banor, plock-och-placera-rörelser, massförändringar på 50 procent, plötsliga pålagda laster och starka högfrekventa störningar, håller den robusta MRAC robotens följningsfel litet och styrsignalerna jämna. I scenarier där konventionell MRAC:s interna vinster växer utan gräns håller de robusta varianterna dem väluppförda och armens rörelse stabil. 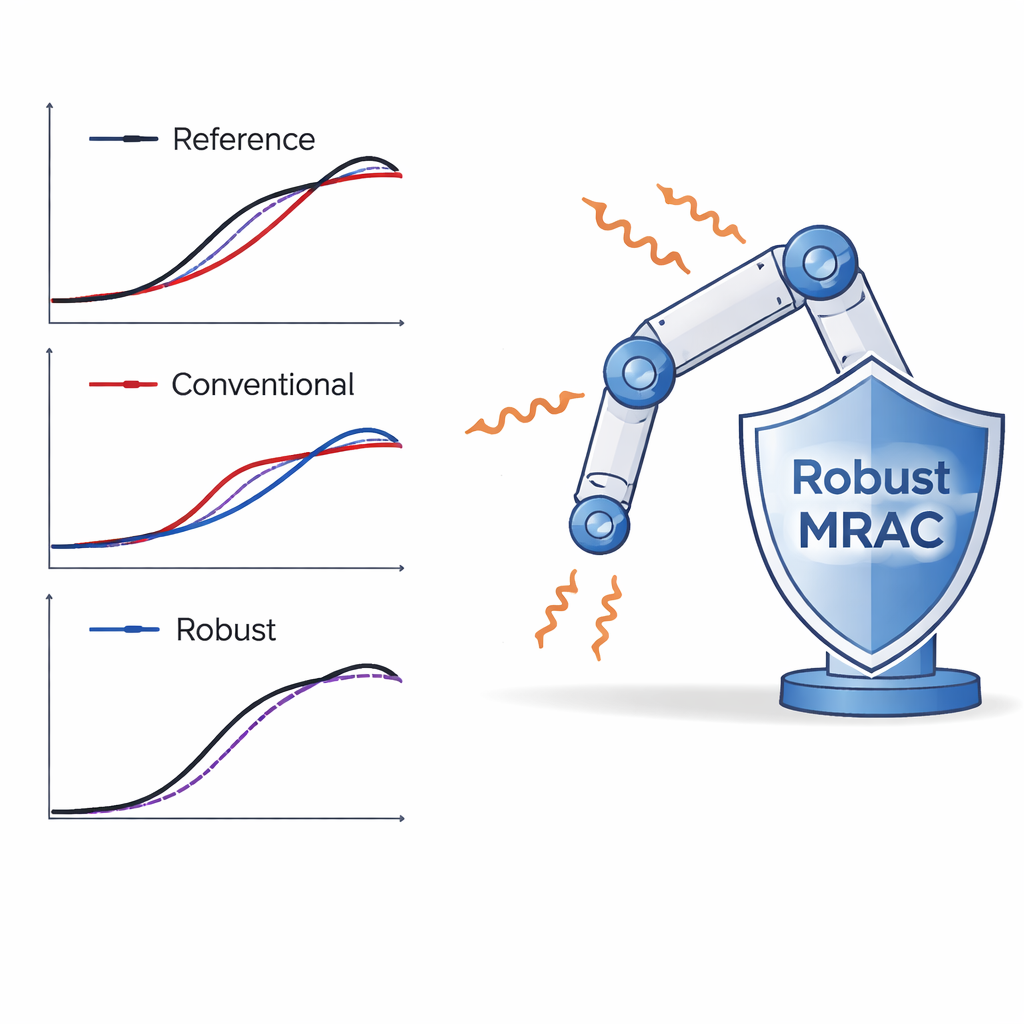
Vad detta betyder för robotar i verkligheten
För en lekmannaläsare är slutsatsen att detta arbete erbjuder ett smartare "autopilot" för industrirobotarmar — en som fortsätter lära och anpassa sig, men utan att bli instabil när miljön eller lasten ändras. Genom att dela upp den komplexa treledsdynamiken i enklare delar och lägga till skyddsmekanismer i inlärningsprocessen låter den föreslagna robusta adaptiva regulatorn roboten följa önskade banor noggrant samtidigt som motorinsatsen hålls rimlig, även under störningar och osäkerhet. Detta förflyttar praktisk robotik ett steg närmare verkligt plug-and-play-system som kan omplaceras snabbt, hantera oväntade förhållanden och arbeta säkert tillsammans med människor utan ständig ominställning av experter.
Citering: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
Nyckelord: styrning av robotmanipulator, adaptiv styrning, industrirobotik, banföljning, robust styrning