Clear Sky Science · sv
En intelligent bioinspirerad flermåls- och skalbar UAV-assisterad klustringsalgoritm i flygande ad hoc-nätverk
Smartare drönarsvärmar på himlen
Föreställ dig flottor av drönare som samarbetar för att leta efter överlevande efter en jordbävning, övervaka skogsbränder eller vaka över åkrar. För att göra detta väl måste hundratals flygande robotar snabbt kommunicera med varandra utan att tömma sina batterier. Denna artikel undersöker hur man organiserar sådana ”drönarsvärmar” så att de håller kontakten, reagerar snabbt och stannar längre i luften genom att låna idéer från en oväntad källa: jaktbeteendet hos sekretärfågeln.
Varför flygande nätverk är svåra att tämja
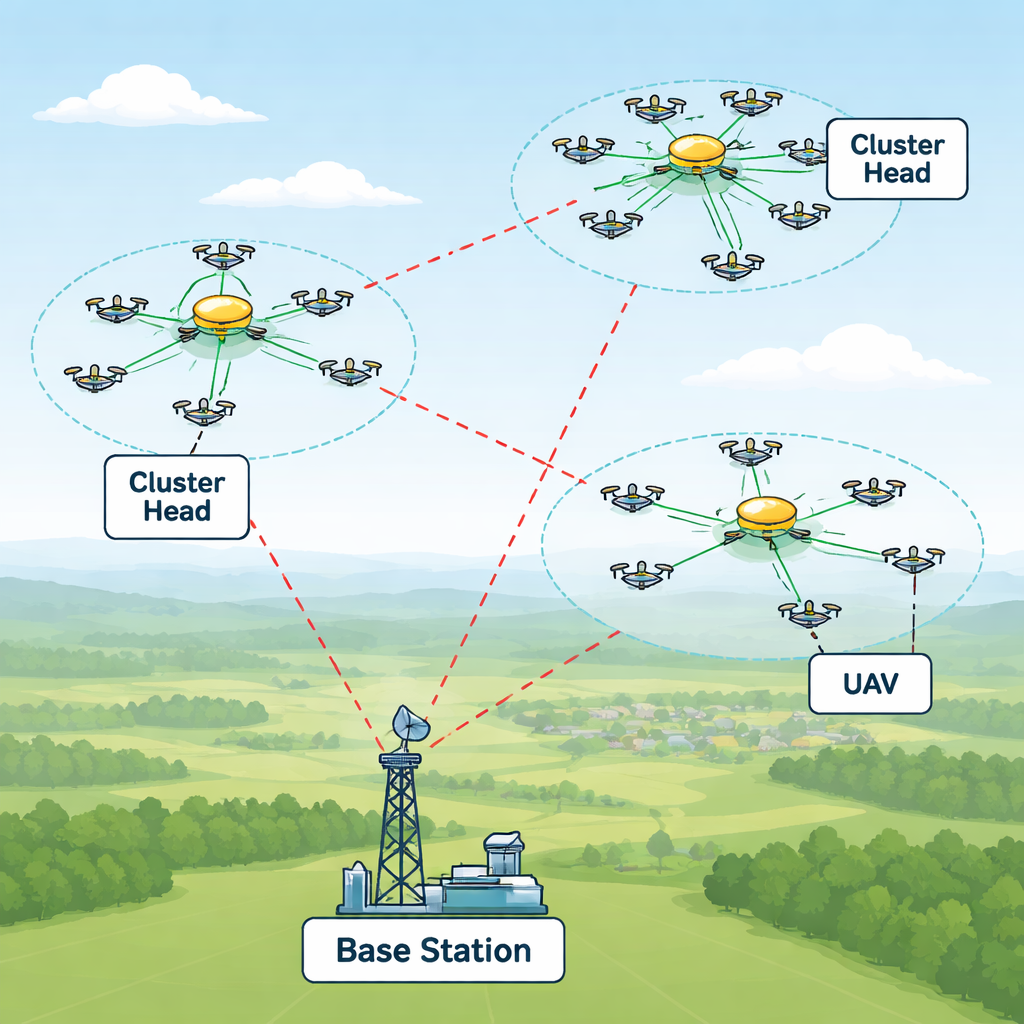
Moderna drönare kan bilda vad ingenjörer kallar Flying Ad Hoc Networks, eller FANETs—trådlösa nätverk som endast existerar i luften. Till skillnad från markbundna nätverk rör sig dessa drönare i tre dimensioner, byter riktning snabbt och är beroende av begränsad batterikapacitet. Om varje drönare försökte kommunicera direkt med alla andra skulle signaler kollidera, fördröjningar öka och batterierna ta slut snabbt. En populär lösning är att bilda kluster: små grupper av drönare ledda av ett ”klusterhuvud” som samordnar lokala meddelanden och kommunicerar med andra klusterhuvuden. Men att välja vilka drönare som ska bli ledare, och när man ska omfördela dessa roller när svärmen rör sig, är ett ständigt skiftande pussel.
Att låna knep från en rovfågel
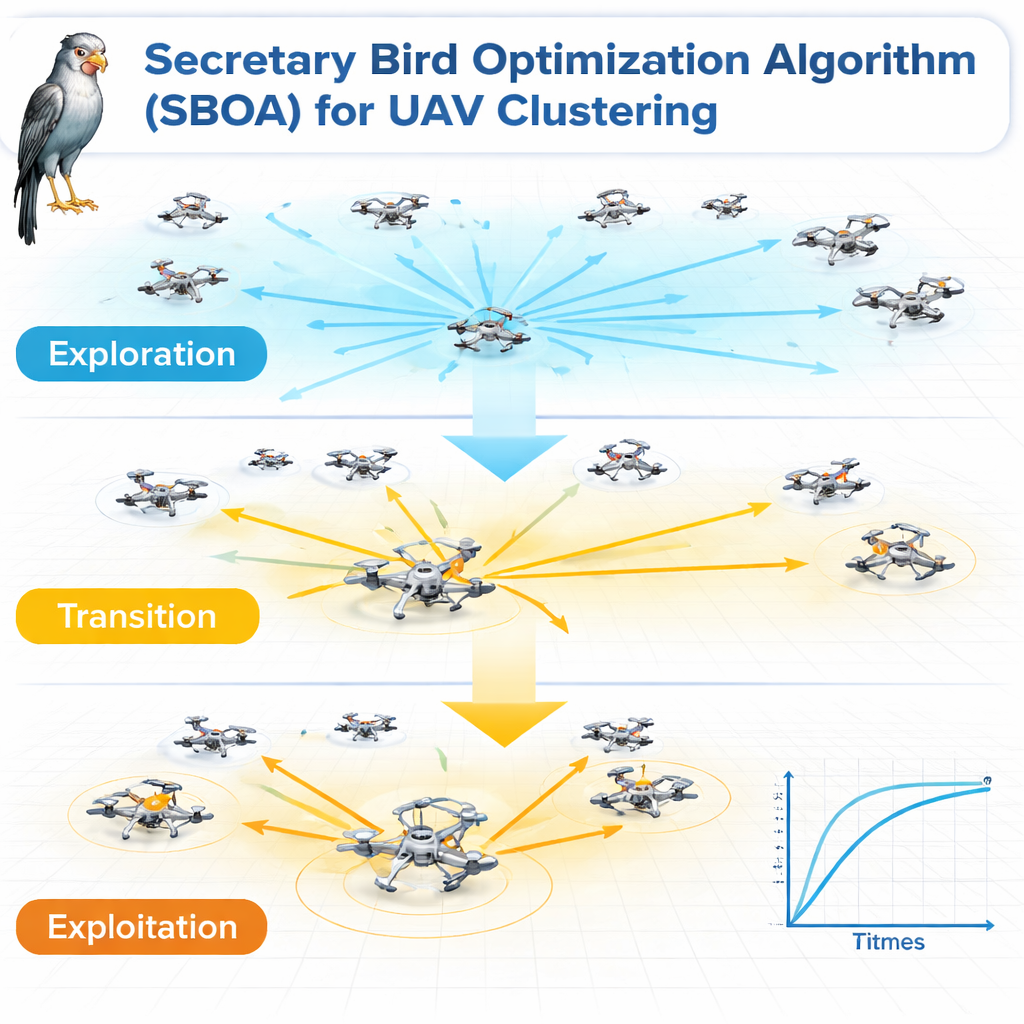
Författarna vänder sig till en bioinspirerad idé kallad Secretary Bird Optimization Algorithm (SBOA). Sekretärfåglar är kända för att scanna stora områden, för att sedan närma sig och slå mot bytet med precisa sparkar. SBOA kopierar detta mönster i programvara. Den börjar med att utforska många möjliga sätt att tilldela klusterhuvuden över drönarsvärmen, för att gradvis fokusera på de mest lovande alternativen. Vid varje steg ställs tre frågor: Är drönarna inom varje kluster tillräckligt nära varandra? Har de valda ledarna fortfarande tillräcklig batterinivå? Och fördelas arbetsbelastningen rättvist så att ingen ledare överbelastas medan andra står sysslolösa? Genom att behandla detta som ett flermålsproblem väger algoritmen avstånd, energi och rättvisa samtidigt.
Test av drönarsvärmar i virtuella världar
För att se om denna fågelinspirerade strategi hjälper byggde teamet detaljerade dator‑simuleringar. De släppte mellan 30 och 160 drönare i 3D-virtuella utrymmen av olika storlek, från en kvadratkilometer upp till en stor 15×15 kilometers låda, och lät dem flyga med en enkel rörelsemodell. Kommunikationsräckvidden varierades från 100 till 900 meter. För varje scenario tävlade SBOA mot tre avancerade alternativ som också imiterar naturligt beteende: Fire Hawk Optimization (FHOA), Portia Spider Optimization (PSOA) och en spermiefertilisationsbaserad flermålsmetod (MOSFP). Forskarna följde hur många kluster som bildades, hur snabbt en stabil struktur uppstod, hur jämnt ledarskapet delades och hur mycket ”fitness” lösningarna uppnådde, genom att kombinera avstånd, energianvändning och balans till en enskild poäng.
Vad simuleringarna visade
I nästan alla tester kom SBOA ut i ledningen. Den uppnådde regelbundet upp till 15% högre fitness än sina rivaler, med cirka 10% mer effektiv klustring och ungefär 40% bättre belastningsbalans mellan ledarna. I tidsbaserade experiment nådde sekretärfågel‑metoden ett stabilt klustermönster på färre simuleringssteg, särskilt när antalet drönare ökade. Även i glesa, stora 3D‑områden där drönarna är långt ifrån varandra behöll SBOA mer än 85% av den bästa uppnåeliga fitnessen, vilket visar att den kan anpassa sig både till täta svärmar och utspridda formationer. Visualiseringsverktyg som ytdiagram, t‑SNE‑kartor och violinplottar bekräftade att SBOA producerade tätare, mer distinkta kluster med mindre variation i ledarnas arbetsbelastning än de andra metoderna.
Från simulering till verkliga uppdrag
Studien avslutar att en sekretärfågel‑inspirerad strategi erbjuder ett starkt recept för att hantera drönarsvärmar: den håller drönarna effektivt grupperade, fördelar arbetet rättvist bland ledarna och reagerar smidigt när förhållandena förändras. För en lekman betyder detta att framtida flottor av räddnings-, jordbruks‑ eller övervakningsdrönare kan vara längre uppkopplade, slösa mindre batteri och svara mer tillförlitligt, helt enkelt genom att organisera sig bättre. Författarna noterar att verkliga faktorer—som vindbyar, GPS‑fel och radiointerferens—fortfarande behöver testas, och de föreslår att lägga till inlärningsbaserad rörelseprediktion och smartare routning nästa steg. Men som ett steg mot robusta luftburna nätverk visar SBOA att studier av hur naturen jagar på savannen kan hjälpa våra robotassistenter att bli betydligt mer kapabla i luften.
Citering: Aslam, Z., Rahman, T., Husnain, G. et al. An intelligent bio-inspired multi-objective and scalable UAV-assisted clustering algorithm in flying ad hoc networks. Sci Rep 16, 4870 (2026). https://doi.org/10.1038/s41598-026-35196-z
Nyckelord: drönar-svärmar, trådlös kommunikation, bioinspirerade algoritmer, energieffektiv nätverksteknik, flygande ad hoc-nätverk