Clear Sky Science · sv
Förklarlig AI med EDA för V2I-förlustprediktion
Varför smartare bil–väg-länkar spelar roll
Moderna bilar kommunicerar i allt högre grad med vägen runt dem och skickar och tar emot trådlösa meddelanden till trafikljus, väginstanser och annan infrastruktur. Dessa länkar hjälper till med säkerhetsvarningar, trafikstyrning och i framtiden autonom körning. Men stadsgator är röriga trådlösa miljöer: höga byggnader, träd, broar och lastbilar kan alla försvaga eller blockera signalen. Denna artikel visar hur man kan förutsäga den signalförsvagningen på ett sätt som inte bara är exakt utan även förståeligt för ingenjörer och tillsynsmyndigheter som måste lita på systemen.
Se på data innan du litar på modellen
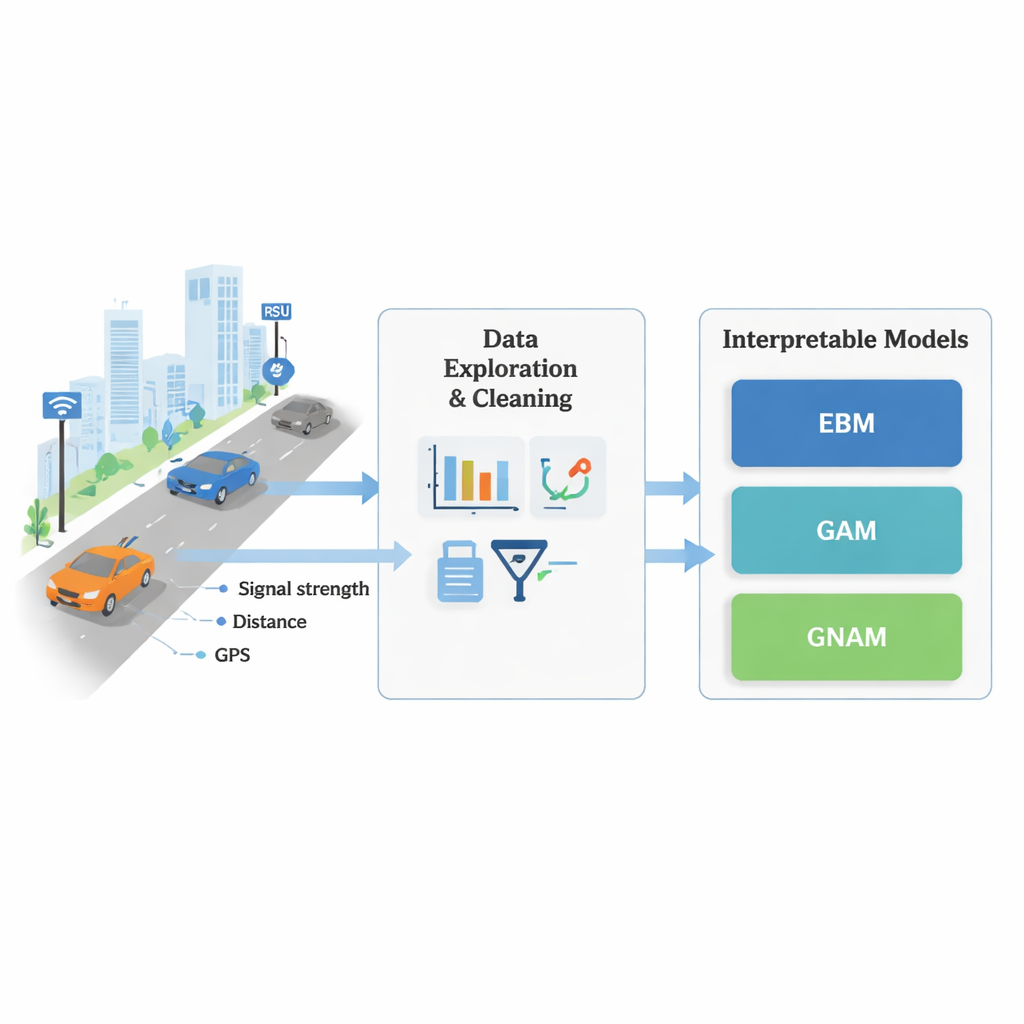
Författarna utgår från en omfattande mätkampanj i Bologna, Italien, där bilar utrustade med antenner körde genom 24 olika urbana scener — raka vägar, rondeller, trädalléer, broar och områden med tung trafik — samtidigt som de kommunicerade med vägmonterade sändare. Ur dessa mätningar härleder de ”path loss”, ett mått på hur mycket signalen dämpas när den färdas från väg till bil. Innan de bygger någon prediktiv modell genomför de noggrann explorativ dataanalys: de plottar fördelningar, kontrollerar korrelationer och delar upp data i sju representativa fallstudier såsom fri sikt, blockerade siktlinjer och vegetation. Det här steget avslöjar brus, uteliggare och dolda mönster som måste hanteras för att få förtroendefulla prediktioner.
Rensa upp i verklighetens trådlösa kaos
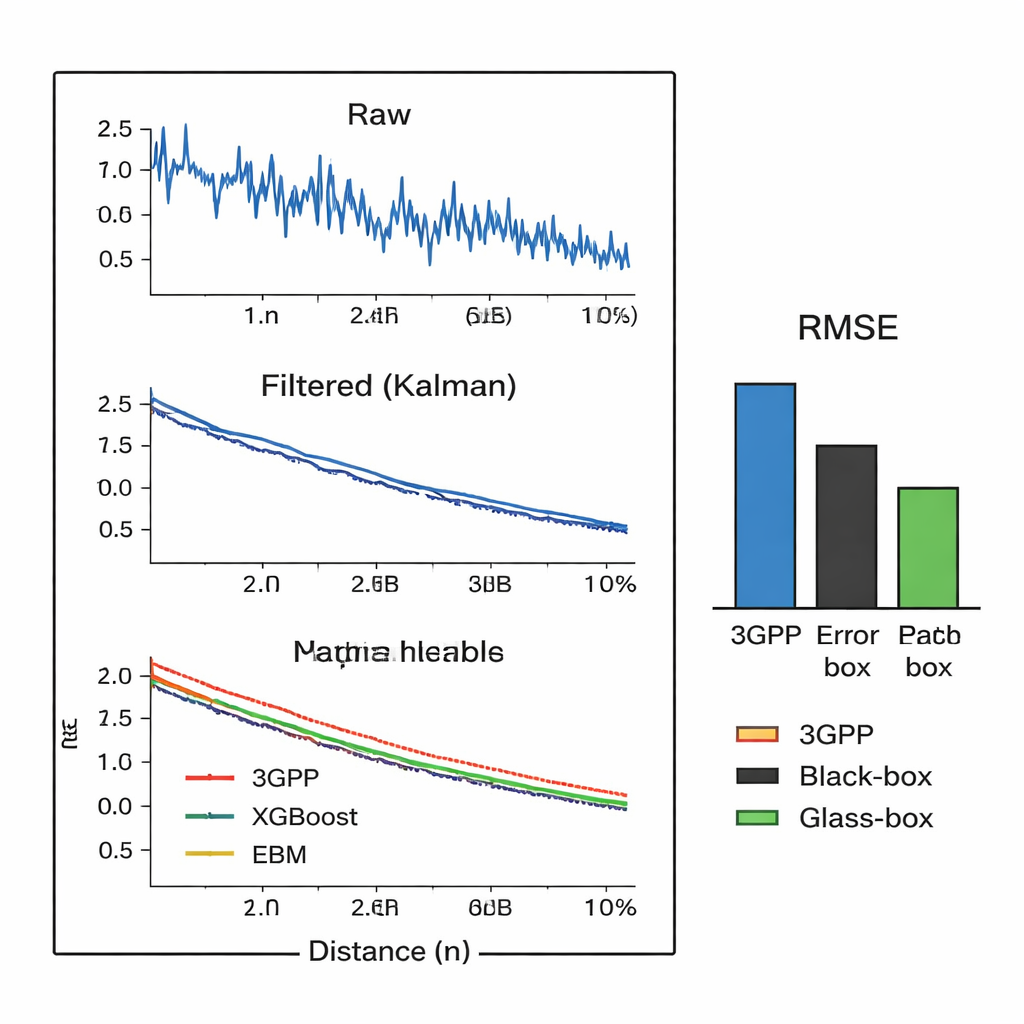
Verkliga trådlösa data är fulla av oregelbundenheter orsakade av mätfel, reflektioner från byggnader och plötsliga blockeringar av passerande fordon. Forskarna utformar en förbehandlingspipeline för att tygla detta kaos. Först skalas alla indatafunktioner — såsom avstånd, bilens position och hastighet — så att de blir jämförbara. Därefter tas uteliggare bort med en robust statistisk regel som trimrar extrema, inkonsistenta mätningar. Slutligen applicerar de ett optimerat Kalmanfilter, ett klassiskt verktyg från reglertekniken, för att jämna ut signalen över avstånd samtidigt som underliggande trender bevaras. Genom att ställa in filtret så att det maximerar prestandan hos efterföljande modeller visar de att denna rengöringsprocess kan reducera prediktionsfel med mer än hälften och avslöja stabila mönster som modeller kan lära sig från.
Öppna AI:s svarta låda
Traditionella formler för trådlös planering, som 3GPP- och dual-slope-modellerna, är enkla och transparenta men fångar ofta inte komplexiteten i täta stadsmiljöer. Å andra sidan uppnår populära maskininlärningsmetoder som random forests och XGBoost hög noggrannhet men fungerar som svarta lådor: de ger prediktioner utan mycket insikt i varför. Denna artikel fokuserar på en mittemellan-lösning: ”glasbox”-modeller som förblir matematiskt tillräckligt enkla för att tolkas samtidigt som de fångar icke-linjärt beteende. Författarna testar tre sådana modeller — Explainable Boosting Machines, Generalized Additive Models och Generalized Neural Additive Models — tillsammans med standardiserade svarta låda-algoritmer och klassiska formler, och använder strikta train–test-splitar och 5-fold cross-validation över alla scenarier.
Vad som driver signalförlust på verkliga vägar
Genom att kombinera sina rensade data med tolkbara modeller kan författarna precisera vad som betyder mest för path loss i städer. Avståndet mellan bil och vägstation dominerar föga förvånande, men bilens exakta GPS-koordinater och tid spelar också roll och reflekterar hur gatunät och trafikmönster formar kanalen. För komplexa scener — som NLOS-sträckor bakom byggnader, under broar, genom trädkronor eller bland tunga lastbilar — matchar glasbox-modellerna eller ligger något efter de bästa svarta låda-modellerna i noggrannhet, men de visar tydligt hur varje faktor skjuter prediktionen uppåt eller nedåt. Studien utvärderar också beräkningstid och energianvändning och drar slutsatsen att dessa tolkbara modeller är snabba och lätta nog för realtidsdrift i vägstationer och ombordenheter.
Bygga säkrare, mer transparenta fordonsnätverk
För en lekmannaläsare är huvudbudskapet att vi nu kan förutsäga hur väl en bil kommer att ”höra” vägen i trånga städer med både precision och tydlighet. Istället för att förlita sig på ogenomsiktig AI som ingen fullt ut förstår använder detta ramverk datautforskning, brusfiltrering och förklarliga modeller för att leverera nära toppmodern noggrannhet samtidigt som det visar exakt vilka faktorer som spelar roll. Denna transparens är avgörande för säkerhetskritiska Vehicle-to-Everything-system, där ingenjörer, tillsynsmyndigheter och till och med domstolar kan behöva granska beslut. Arbetet pekar mot en väg för framtida 5G/6G bil–väg-nätverk som inte bara är snabba och tillförlitliga utan också ansvarstagande och enklare att designa, testa och lita på.
Citering: Ameur, M.B., Chebil, J., Habaebi, M.H. et al. Explainable AI with EDA for V2I path loss prediction. Sci Rep 16, 4954 (2026). https://doi.org/10.1038/s41598-026-34987-8
Nyckelord: fordon-till-infrastruktur, prediktion av förlust i signalstyrka, förklarlig AI, trådlösa kanaler, 5G V2X