Clear Sky Science · sv
En långdistansmetod för LiDAR–kameras extrinsiska kalibrering för spårtrafik
Hålla tågen säkra på långt håll
Moderna förarlösa tåg förlitar sig på elektroniska ”ögon” för att bevaka spåren efter hinder långt innan en människa skulle kunna se dem. Två av de viktigaste ögonen är kameror och laserskannrar kallade LiDAR, som vardera uppfattar världen på olika sätt. För att samarbeta måste de vara inriktade med stor precision, en uppgift som blir förvånansvärt svår när man bevakar spår hundratals meter bort. Den här studien presenterar ett nytt sätt att justera dessa sensorer så att de pålitligt kan skydda järnvägssystem på lång räckvidd.
Varför sensorinriktning spelar roll
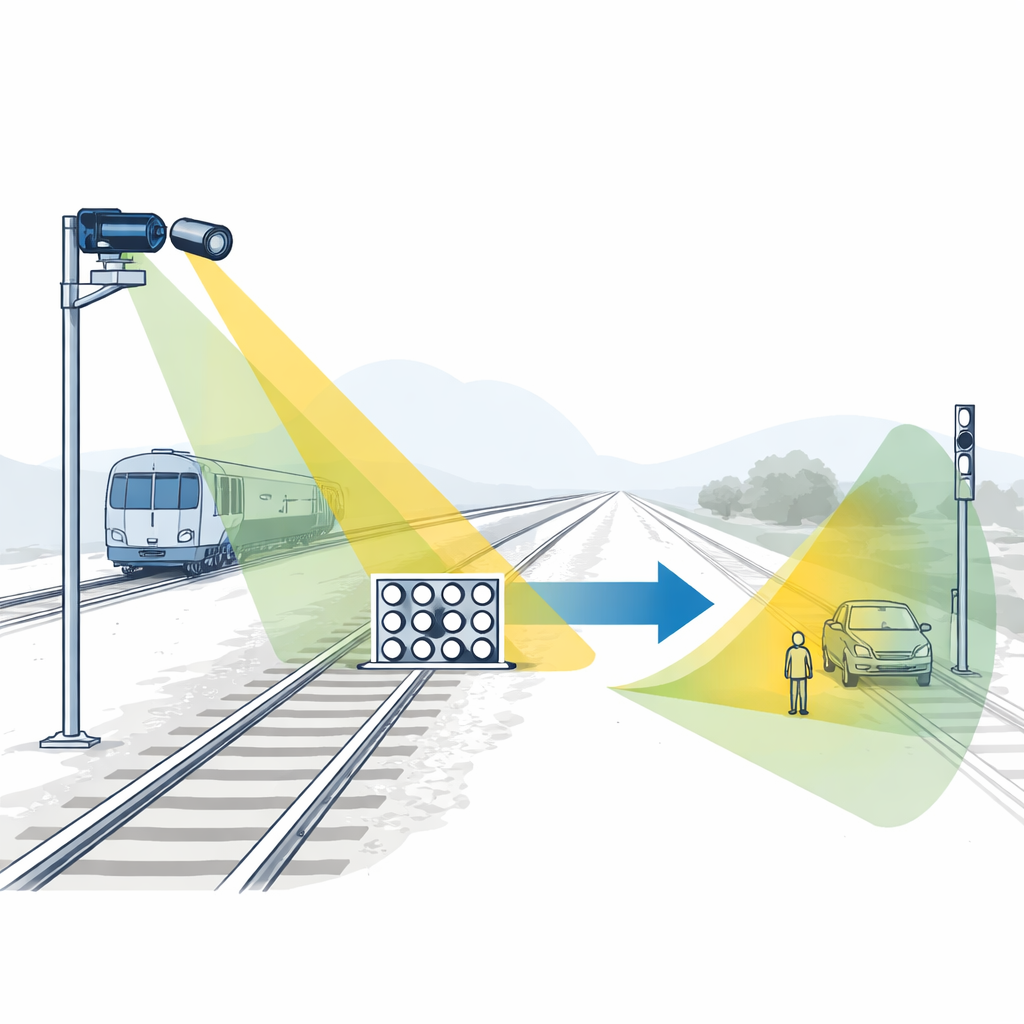
På ett autonomt tåg fångar kameror detaljerade färgbilder medan LiDAR mäter avstånd genom att skjuta ut ljuspulser och mäta tiden tills de kommer tillbaka. Att förena dessa två perspektiv gör det möjligt för systemet att upptäcka och spåra föremål som kan tränga in på spårområdet, från en strandad bil vid en övergång till skräp på rälsen. Men fusion fungerar bara om systemet exakt vet hur kameran och LiDAR är placerade i förhållande till varandra. En liten felinriktning kan förskjuta ett upptäckt hinder med många centimeter—eller till och med meter—på långa avstånd, vilket kan göra automatiska skyddssystem långsammare eller mindre pålitliga.
Utmaningen att se långt längs spåret
För spårapplikationer använder ingenjörer ofta teleobjektiv så att kameran tydligt kan se objekt hundratals meter bort. På sådana avstånd blir dock LiDAR-återkomsterna från ett kalibreringsmål mycket glesa: bara några få laserpunkter träffar brädan som används för att justera sensorerna. De flesta befintliga inriktningsmetoder antar ett tätt punktsmoln eller rika kanter i scenen, förutsättningar som helt enkelt inte gäller på lång räckvidd. Som en följd blir det svårt att hitta matchande funktioner mellan 2D-bilden och den 3D-punktmolnet med tillräcklig noggrannhet för att stödja säker tågstyrning.
En smartare kalibreringsbräda
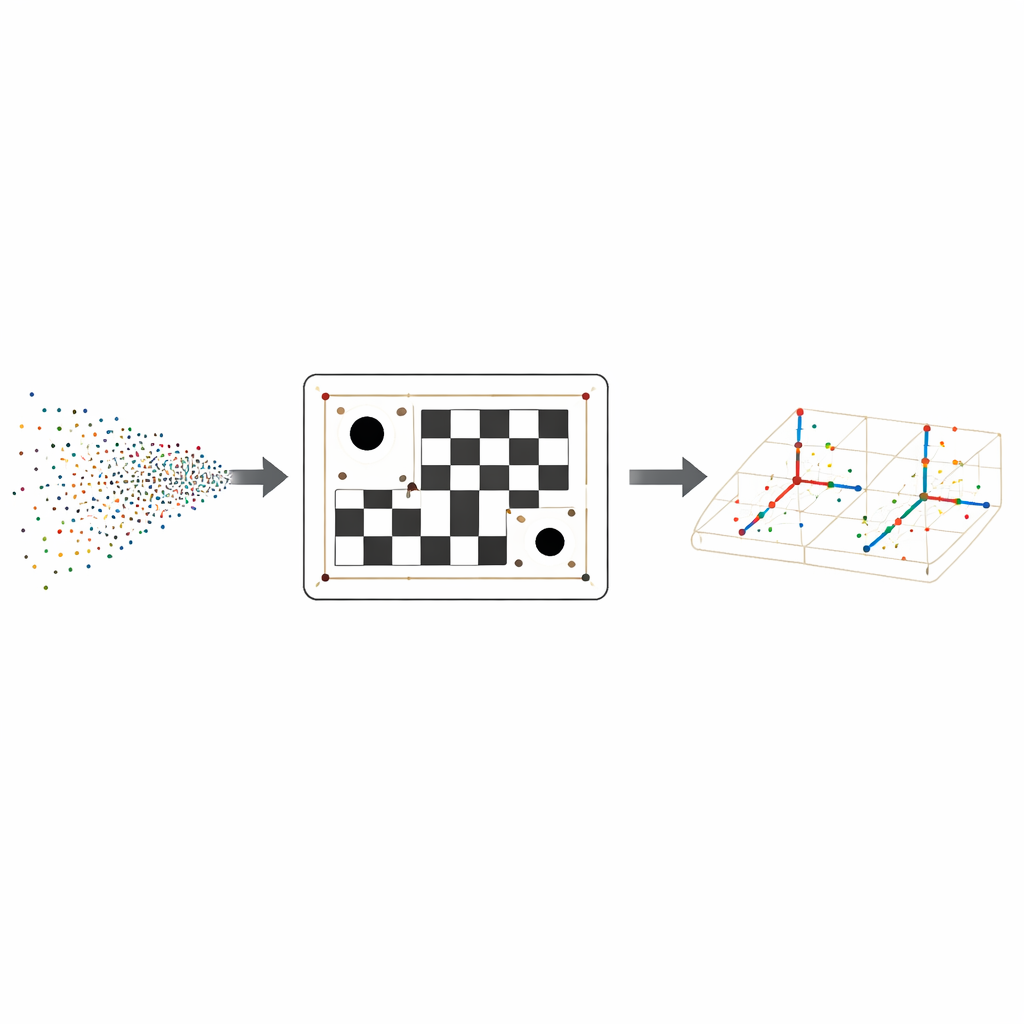
För att övervinna detta designar författarna en speciell kalibreringsbräda som kombinerar ett bekant svart–vitt schackmönster med tre cirkulära hål vars centra bildar en oregelbunden triangel. Schackmönstret ger många precisa hörnpunkter i kamerabilden, medan hålen skapar starka geometriska ledtrådar för LiDAR, som lätt kan upptäcka deras runda kanter även från långt håll. Eftersom de tre hålen är placerade i en asymmetrisk triangel kan brädans orientering i rummet bestämmas entydigt, vilket undviker förväxling genom spegelvända eller roterade vyer.
Att förvandla glesa prickar till tillförlitliga matchningar
På LiDAR-sidan rengör metoden först punktmolnet och anpassar ett plant plan som representerar brädan. Den projicerar sedan punkterna på detta plan och använder en robust cirkelfitningsprocedur för att hitta varje håls centrum, och förfinar deras positioner genom att upprätthålla de kända fysiska avstånden mellan hålen. Med triangeln av hålcentra etablerad bygger algoritmen ett lokalt koordinatnät över brädan, förutspår var varje schackhörn borde ligga i 3D och kontrollerar närliggande LiDAR-punkter efter rätt ljusstyrke- eller reflektivitetsvärden. Denna kombination av geometri och reflektivitet förvandlar en handfull utspridda återkomster till en pålitlig uppsättning 3D-hörnpositioner som matchar kamerans 2D-hörn.
Finputsning av sensorrelationen
När samma fysiska hörn identifierats både i kamerabilden och i LiDAR-molnet löser författarna för den exakta rotationen och translationen som binder ihop de två sensorerna. De använder en iterativ optimeringsteknik som upprepade gånger justerar denna relation för att minska gapet mellan var LiDAR-punkterna projiceras i bilden och var kameran faktiskt ser hörnen. Tester på en riktig järnvägsplattform, med olika kameralinser från måttliga till kraftiga teleobjektiv, visar att den nya metoden konsekvent håller projektionsfelen till ungefär en pixel eller mindre, och den överträffar flera välkända alternativ särskilt vid de längsta brännvidderna där data är mest knappa.
Vad detta betyder för spårsäkerheten
I vardagliga termer erbjuder studien ett mer pålitligt sätt att tala om för kameran och LiDAR på ett autonomt tåg: ”du är här och tittar exakt i den här riktningen.” Genom att omforma kalibreringsbrädan och lägga till smart bearbetning av glesa LiDAR-data bibehåller metoden hög noggrannhet även när sensorerna bevakar scener hundratals meter bort. Denna tätare inriktning gör att det sammansmälta systemet kan placera hinder mer exakt i 3D-utrymme, vilket stärker den tekniska grunden för säkrare spårtrafik och mer trovärdig multisensoruppfattning i verkligheten.
Citering: Liu, X., Wang, H., Ruan, S. et al. A long-range LiDAR–camera extrinsic calibration method for rail transit. Sci Rep 16, 8018 (2026). https://doi.org/10.1038/s41598-025-34547-6
Nyckelord: spårtrafiksäkerhet, LiDAR-kamerafusion, sensorkalibrering, autonoma tåg, långdistansuppfattning