Clear Sky Science · sv
3D-rekonstruktion av grunda havsstrukturer med direkt systemkalibrering och extraktion av svag laserradie
Att göra dolda undervattensvärldar synliga
Många av de mest fascinerande spåren av vårt förflutna ligger nu under vatten—vrak, översvämmade städer och kustruiner. För att utforska och bevara dessa platser digitalt behöver forskare noggranna 3D-kartor över vad som ligger på havsbotten. I grunda vatten försvårar dock starkt solljus, virvlande sand och själva vattnet precisa mätningar. Denna artikel presenterar ett nytt sätt att skanna och rekonstruera detaljerade 3D-modeller av undervattensstrukturer med en lågkraftig blå laser, även i solbelysta, brusiga förhållanden där befintliga metoder till stor del misslyckas.
Varför skanning i grunda hav är så svårt
Att skapa en digital 3D-modell av en scen innebär vanligtvis att sätta ihop miljontals punkter i rummet—det som forskare kallar ett punktmoln. På land gör lasrar och kameror detta pålitligt. Under vatten blir det emellertid rörigt. Vattnet böjer och sprider ljus, sveper in scener i ett blågrönt dis och suddar ut kanter. Solljus som lyser genom vågor skapar starka, rörliga mönster kallade kaskader (caustics) som kan överrösta den tunna linjen från en lågkraftig laser. Mikroskopiska partiklar lägger ett dimmigt slöja och ger fladdrande reflektioner. Som en följd fungerar många nuvarande undervattenssystem bara på natten, i mycket svagt ljus eller under noggrant kontrollerade förhållanden—vilket inte är hur riktiga hav beter sig.
En roterande blå laser som en 3D-målarpensel
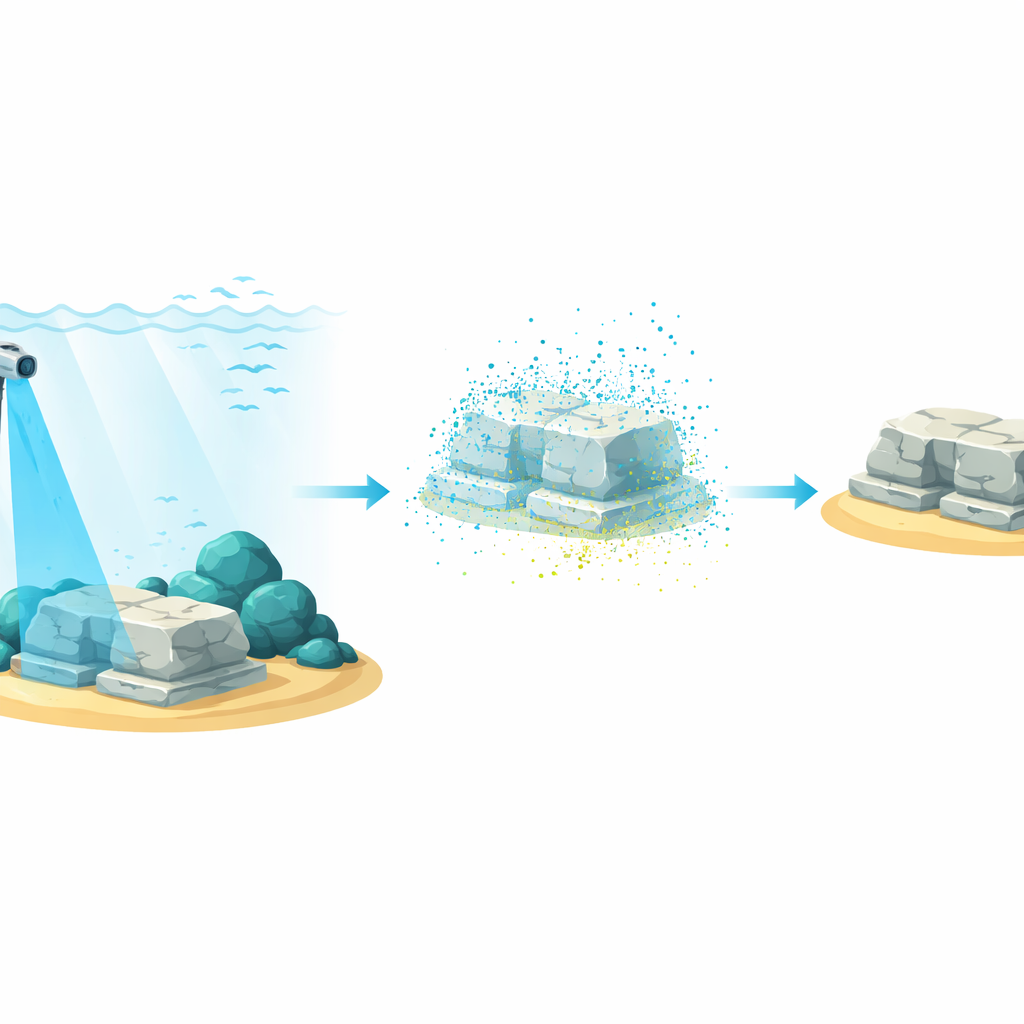
Författarna byggde en kompakt, vattentät skanner som fungerar som en 3D-målarpensel. Den projicerar ett tunt vertikalt ark av blått laserljus som sveper runt när en arm på enheten långsamt roterar. Varhelst detta ark träffar en sten, vägg eller artefakt ritar det ut en lysande kurva. En kamera monterad bredvid lasern fångar bilder vid varje litet rotationssteg. Genom att kombinera alla dessa vyer kan systemet återskapa ett tätt 3D-punktmoln av omgivningen, komplett med ungefärlig färg, som senare kan omvandlas till ett ytnät för visualisering eller virtuell verklighet.
Lära systemet var varje pixel hör hemma i rummet
En central utmaning i sådana system är kalibrering: att ta reda på hur varje kamerapixel linjer upp med verkliga koordinater. Traditionella tillvägagångssätt bygger på detaljerade matematiska modeller av kamera och vatten, med dussintals parametrar som måste ställas in, vilket gör dem ömtåliga och känsliga för fel. Här tar forskarna en datacentrerad väg. De lär direkt en avbildning från bildpixlar till 3D-positioner genom att skanna en vägg täckt av ett känt rutnät. Endast några hundra noggrant valda provpunkter behövs. När denna karta lagrats i en uppslagstabell kan skannern omvandla vilken upptäckt laserpixel som helst till en 3D-punkt utan att någonsin uttryckligen lösa komplicerade kameraparametrar.
Reta ut och förstärka ett svagt blått spår
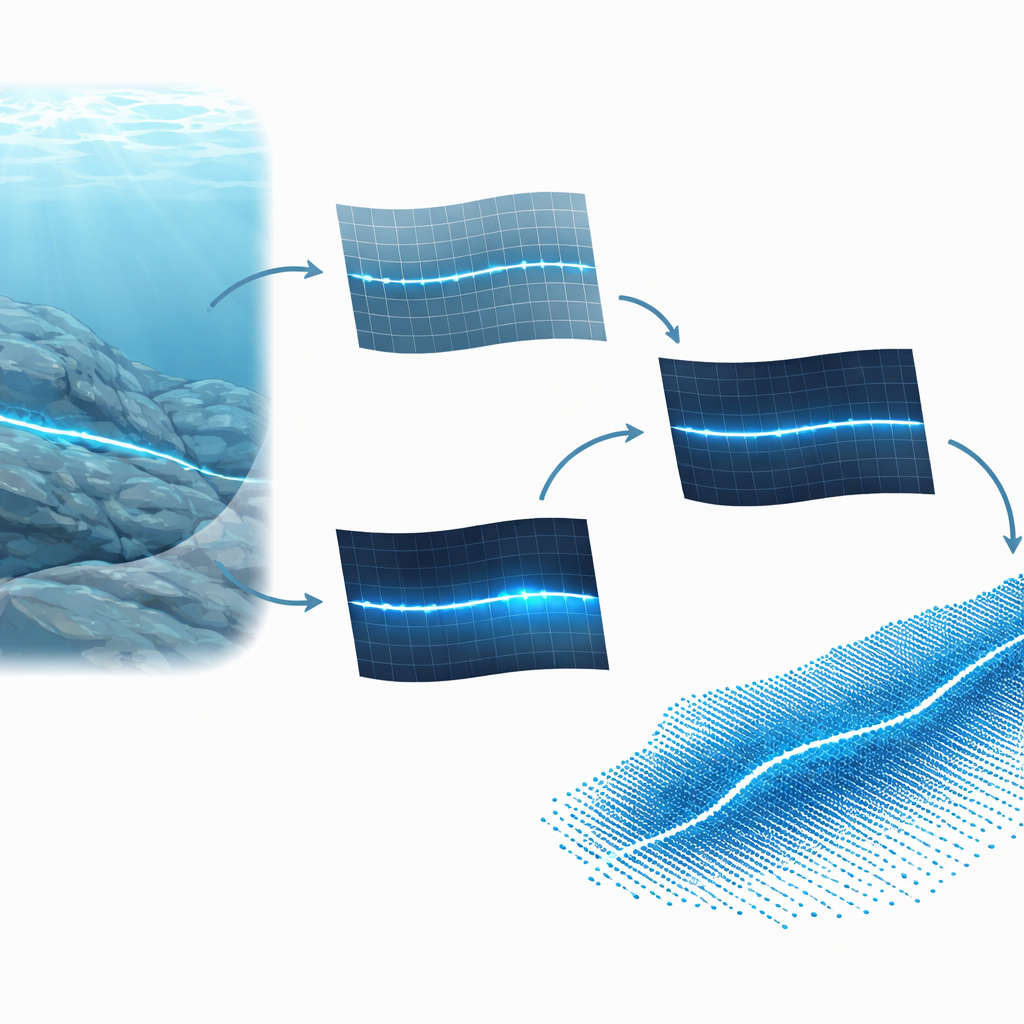
Eftersom kalibreringen görs i luft måste undervattenmaterial först ”rätas ut” för att åtgärda den böjning som orsakas av brytning vid vattenytan. Teamet mäter denna deformation med bilder av ett rutnät som går över luft och vatten och beräknar sedan hur varje undervattenpixel skulle förskjutas om den sågs i luft. Efter denna avböjning börjar den verkliga knepigheten: att hitta en svag, ofta bruten blå linje i en brusig bild. Metoden räknar först fram ett ”blåhets”-värde för varje pixel, justerat så att ljus nära laserens blå nyans framträder. Därefter undersöks hur mycket blåare varje pixel är än sina grannar och en maskininlärningsklassificerare används för att skapa en grov svartvit karta över sannolika laserpixlar.
Från brusiga prickar till rena 3D-former
Den första kartan innehåller fortfarande många falska träffar från sand, reflektioner och kaskader. För att rensa upp den söker systemet efter raka linjemönster med en klassisk teknik som röstar på möjliga linjer baserat på pixelpositioner. Det behåller bara de linjer som matchar laserns förväntade orientering. En slät kurva anpassas sedan genom de återstående punkterna, och varje pixels ”konfidens” höjs om den ligger nära denna kurva och har stark blåhet. För varje rad i bilden väljs den pixel med högst konfidens som en del av det slutliga laser-spåret. Genom att mata dessa rengjorda spår, steg för steg, in i kalibreringstabellen produceras ett 3D-punktmoln färgat från den ursprungliga kamerabilden.
Hur väl fungerar det i verkligt vatten?
Författarna testade sitt system i tankar och i ett grunt hav på cirka fem meters djup, under belysning som sträckte sig från dämpad inomhusbelysning till kraftig middagssol med tiotusentals lux. De skannade objekt med exakt kända mått—en boll och en specialtillverkad akrylform—och jämförde uppmätta storlekar med referensvärden. På avstånd upp till ungefär en halvmeter höll det typiska felet sig under en bråkdel av en millimeter även under starkt ljus, och höll sig inom några tiondelar av en millimeter på större avstånd tills laserlinjen blev nästan osynlig för ögat. Befintliga metoder avsedda för mörka förhållanden kunde inte rekonstruera scener vid dessa högre ljusnivåer alls.
Vad detta betyder för utforskning av undervattensplatser
I grunden visar detta arbete att noggrann 3D-kartläggning av grunda undervattensstrukturer inte kräver otympliga högkraftslasrar eller perfekt kontrollerat mörker. Genom att noggrant korrigera för vattnets ljusbrytning, framhäva laserfärgen och använda en direkt kalibrering som knyter pixlar till verkliga positioner, kan systemet pålitligt dra fram ett svagt blått spår ur brusiga, solbelysta scener. Även om prestandan sjunker i extremt starkt ljus och med vissa objektfärger öppnar tillvägagångssättet vägen för mer rutinmässig, lågkostnadsskanning av rev, hamnmurar och nedsänkta ruiner, och hjälper forskare och konservatorer att bygga trovärdiga digitala kopior av undervattensvärldar.
Citering: Garai, A., Kumar, S. 3D reconstruction of shallow sea structures using direct system calibration and faint laser line extraction. Sci Rep 16, 9321 (2026). https://doi.org/10.1038/s41598-025-25736-4
Nyckelord: undervatten 3D-skanning, laserlinje-rekonstruktion, kartläggning av grunda hav, punktmolnsavbildning, underwater archaeology