Clear Sky Science · sv
En öppen referensdatamängd för maskininlärning och intelligent banaoptimering i fasta vingars obemannade flygsystem
Varför smartare drönarflygningar spelar roll
Från grödinspektioner till sök‑och‑räddning utför fasta‑vingade drönare tyst en växande mängd arbete högt över våra huvuden. Att göra dessa luftfarkoster mer pålitliga och mindre beroende av mänskliga piloter kan öppna för säkrare leveranser, skarpare miljöövervakning och mer motståndskraftiga insatser vid nödsituationer eller konfliktzoner. Men framstegen begränsas i allt högre grad inte av brist på idéer, utan av brist på verkliga data. Denna artikel presenterar en ny öppen datamängd med hundratals autonoma drönarflygningar, utformad så att ingenjörer och studenter var som helst kan utveckla och testa smartare flygalgoritmer på samma rika, delade grund.
Ett flygande laboratorium för verkliga uppdrag
Författarna byggde sin datamängd med ett robust, motor‑glidarflygplan av typen Volantex Ranger 2400. Med sitt två och en halv meters vingspann, effektiva vingprofil och rymliga luftkropp kan flygplanet bära modern elektronik samtidigt som det håller sig uppe för långa, stabila uppdrag. Det drivs av en bakmonterad elmotor och ett anpassat litium‑jon‑batteripaket optimerat för uthållighet snarare än korta effektutbrott. Teamet flög denna plattform i helt autonomt läge, med förplanerade rutter som täckte nyckelfaser av flygningen: start, raka kryssningsben, skarpa svängar, dynamiska manövrar och automatiska landningar. Denna kontrollerade men realistiska uppställning förvandlar Ranger till ett flygande laboratorium som beter sig som små operativa drönare som används i civila och försvarsrelaterade sammanhang.
Två hjärnor, ett flygplan
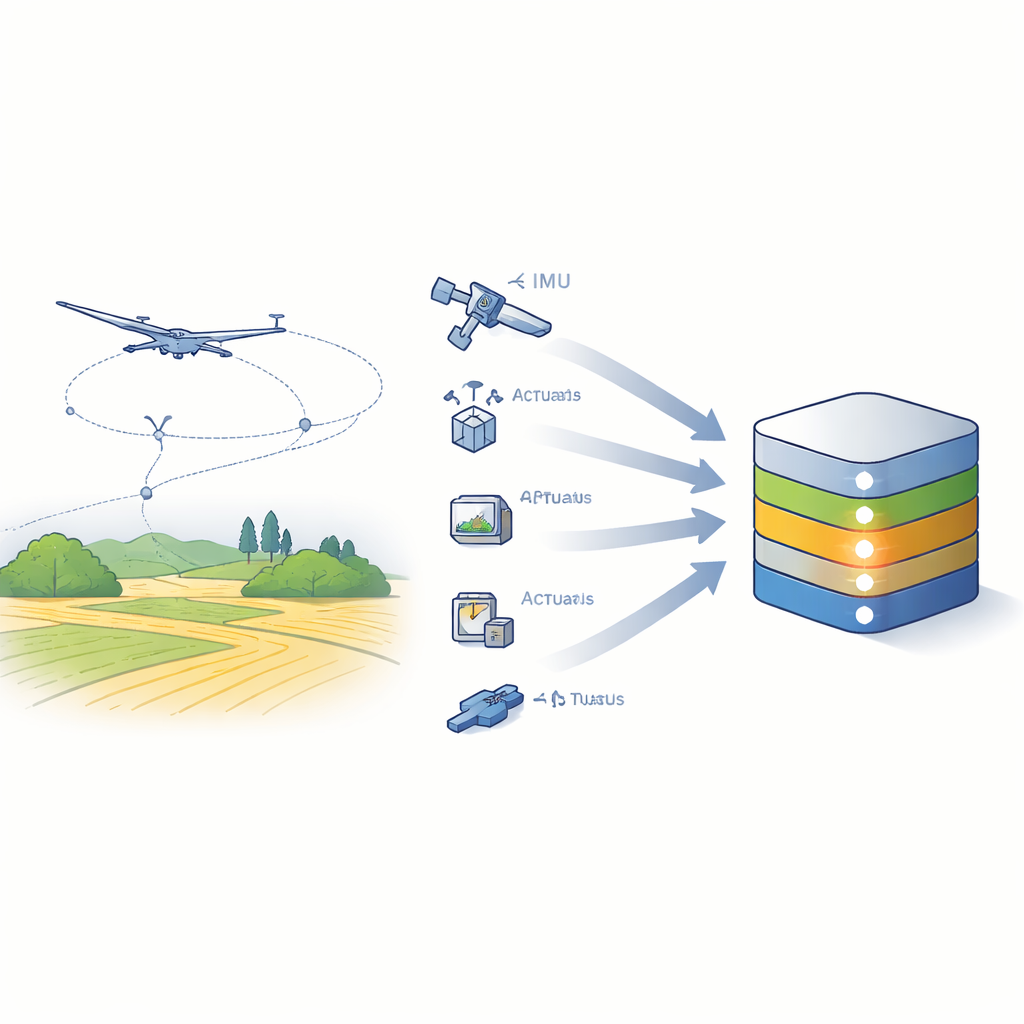
För att fånga ett brett spektrum av användningsfall utrustade forskarna samma flygkropp med två mycket olika ”hjärnor.” En konfiguration använder en kompakt, prisvärd SpeedyBee F405‑flygkontroller, liknande den elektronik hobbyister kan montera på en hemmabyggd drönare. Den andra kombinerar en professionell Pixhawk 6X‑autopilot med en kraftfull Jetson Orin NX‑dator, kapabel att köra krävande artificiell intelligens‑programvara ombord. Båda systemen loggar detaljerad telemetri, inklusive rörelsedata från tröghetssensorer, GPS‑position och hastighet, höjd, lufthastighet, styrspaks‑kommandon, batteristatus och flygläge, med frekvenser tillräckligt höga för att återskapa flygplanets rörelser i fin detalj. Genom att hålla luftkroppen konstant samtidigt som elektroniken byts kan datamängden låta forskare studera hur olika nivåer av ombordberäkning och sensorer påverkar flygbeteendet.
Vad som finns i datamängden
Den resulterande IDF‑DS‑samlingen består av 240 autonoma flygningar, ungefär 32 timmars flygtid och tiotals miljoner inspelade prover. Varje flygning lagras med en konsekvent mappstruktur så att användare snabbt kan hitta huvudloggen, uppdragsplanen, styrparametrar och en färdig‑att‑visa GPS‑bana. En familj av uppdrag följer ett zigzagmönster över ett rektangulärt fält, idealiskt för upprepade jämförelser eller träning av prediktiva modeller. En annan följer en banliknande loop inspirerad av en berömd MotoGP‑bana, med skarpa böjar, svepande kurvor och raka sektioner som utmanar autopiloten. För varje konfiguration och uppdrag fångar loggarna hur flygplanet faktiskt flög, inte bara hur det var tänkt att flyga.
Att omvandla råa flygningar till insikter
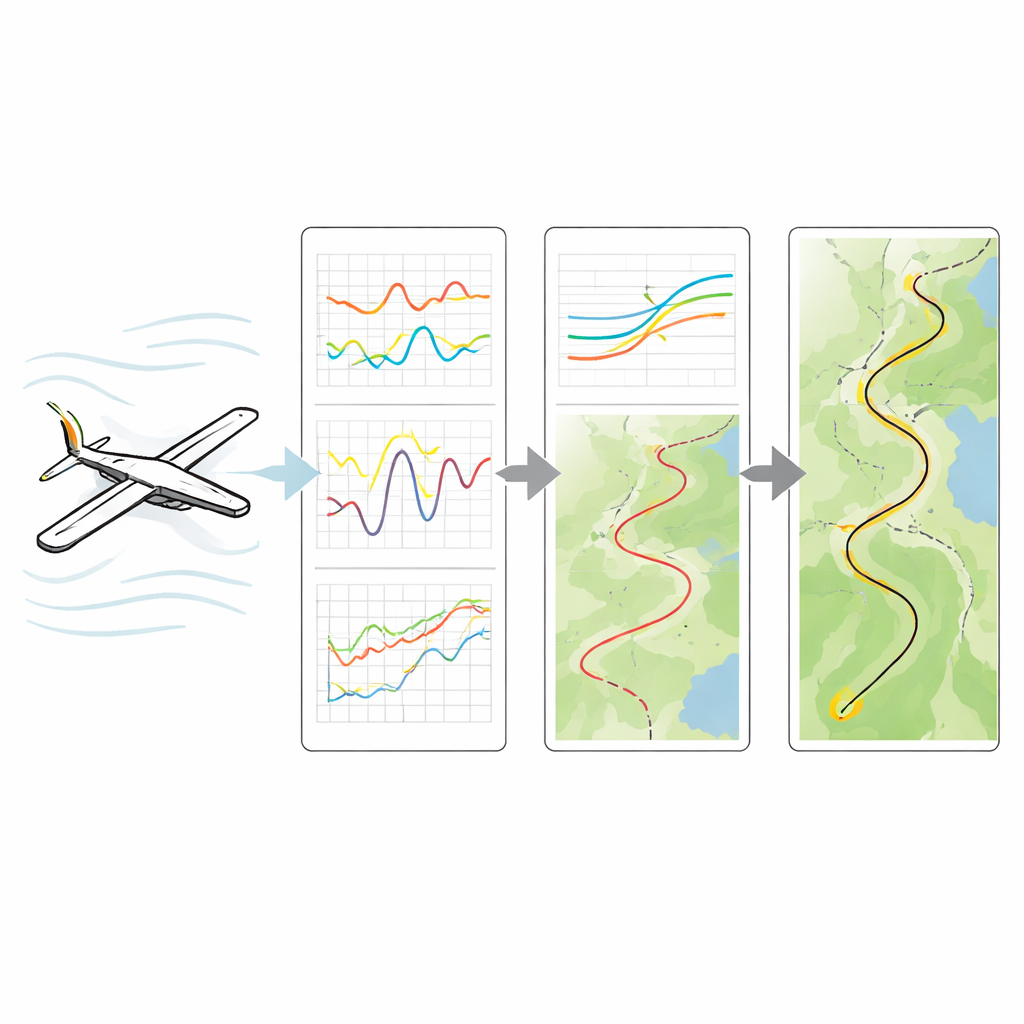
För att visa vad som kan göras med denna skattgruva går författarna igenom flera exempelanalyser. De kontrollerar kvaliteten på de ombordmonterade rörelsesensorerna genom att jämföra dem med accelerationer och rotationer härledda från GPS‑baserad bana, och bekräftar att mätningarna är tillförlitliga nog att fungera som ”sanningsdata” för träning av modeller. De studerar hur väl autopiloten uppskattar hastighet i tre riktningar, hur noggrant flygplanet följer sin planerade bana och hur mycket elektrisk effekt det drar under stigningar, svängar och jämn kryssning. Genom att kombinera lufthastighet, markhastighet och attityd rekonstruerar de till och med vinden som planet upplevde längs sin rutt, och bygger en bild av byar och sidvindar enbart från ombordläsningar. Ett annat användningsfall skisserar hur samma dataströmmar skulle kunna träna en artificiell intelligens‑modell att uppskatta position när satellitnavigering inte är tillgänglig.
Hur denna resurs hjälper framtida flygningar
I vardagliga termer handlar detta arbete om att ge communityn en delad ”svart låda” från hundratals flygningar som vem som helst kan öppna. Istället för att varje team måste samla in sina egna dyra testdata—och hålla dem privata—kan forskare och studenter ladda ner denna öppna datamängd och omedelbart börja utforska nya sätt att hålla drönare på kurs när GPS sviker, upptäcka fel innan de blir farliga eller förlänga batterilivslängd genom att välja mer effektiva rutter. Själva artikeln bygger inte dessa smarta system; den bygger den grund de kräver. För läsaren är slutsatsen att framsteg inom luftburen autonomi nu beror lika mycket på öppna, noggrant dokumenterade flygloggar som på smarta algoritmer—och denna datamängd är ett betydande steg mot den framtiden.
Citering: García-Gascón, C., Bas-Bolufer, J., Castelló-Pedrero, P. et al. An open benchmark dataset for machine learning and intelligent trajectory optimization in fixed-wing unmanned aerial systems. Sci Data 13, 364 (2026). https://doi.org/10.1038/s41597-026-06716-3
Nyckelord: fasta-vingade drönare, flygtelemetri, autonom navigation, maskininlärningsdatamängd, trajektorieroptimering