Clear Sky Science · sv
SPICE-HL3: Dataset med enstaka fotoner, inertiala data och stereokamera för utforskning av högbreddsländers månlandskap
Varför månens skuggor spelar roll för robotar
Framtida uppdrag till månens polarområden hoppas kunna utnyttja fruset vatten och andra resurser, men dessa områden är också några av de mest visuellt vilseledande platserna i solsystemet. Långa, rörliga skuggor, bländande reflexer och nästan total mörker kan lätt lura en robots kameror. Denna artikel presenterar SPICE‑HL3, ett nytt öppet dataset skapat i en inomhus"bit av månen" som låter forskare världen över testa hur robotar ser och navigerar i dessa krävande polära förhållanden, inklusive med en banbrytande enstaka‑fotonkamera som bokstavligen kan se i mörkret.
Att bygga en bit av månens poler på jorden
Eftersom verkliga data från månens poler är sällsynta och dyra att skaffa byggde teamet en kontrollerad testmiljö kallad LunaLab vid universitetet i Luxemburg. Det är ett 11×8 meter stort inomhuslandskap fyllt med grovt basaltgrus, stenar och kratrar, omgivet av svarta väggar och tak för att efterlikna månens ljusabsorberande, luftlösa miljö. En kraftfull, rörlig strålkastare imiterar solen lågt vid horisonten och skapar långa, skarpa skuggor och enorma ljusskillnader mellan solbelysta sluttningar och kolsvarta kraterinre. Genom att ändra lampans position och styrka reproducerade forskarna fyra olika belysningsregimer—referens, middag, gryning/skymning och natt—liknande vad en rover skulle uppleva under en hel måndag nära polerna. 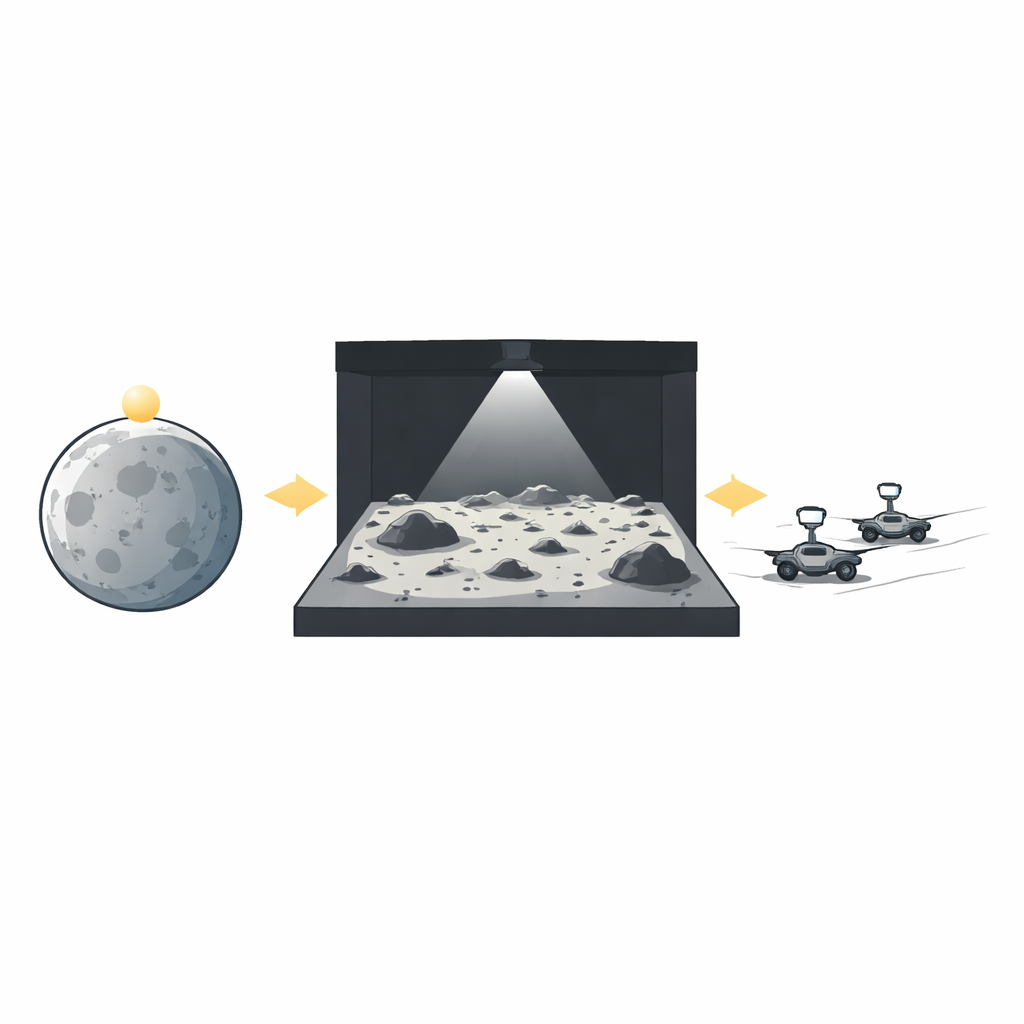
Roverar, sensorer och en kamera som räknar enstaka fotoner
Datasetet samlades in med två små hjuldrivna roverar som bar olika kombinationer av kameror och rörelsesensorer. En rover hade en konventionell monokrom kamera och en ny enstaka‑foton avalanche diode (SPAD)‑kamera; den andra bar en stereokamera med färg och djup samt en inbyggd rörelsesensor. Båda roverarna loggade hjulrotation och inertialdata, medan ett överliggande rörelsefångstsystem spårade deras verkliga positioner med submillimeterprecision. SPAD‑kameran är den utmärkande teknologin: i stället för att mäta ljus som ett kontinuerligt intensitetsvärde rapporterar varje pixel om den detekterade individuella fotoner, med extremt hög hastighet och känslighet. Genom att kombinera många av dessa ultra‑snabba binära ögonblicksbilder kan systemet rekonstruera bilder som behåller detalj även i mycket svaga eller extremt högkontrastiga scener där vanliga kameror tenderar att sudda ut eller mätta bilden.
Att fånga månlika körningar i många varianter
För att ge forskare ett rikt testfält designade författarna sju typer av roverbanor, från långa, stop‑and‑go‑sträckor som imiterar försiktig planetkörning till korta, kontinuerliga körningar i olika riktningar i förhållande till den artificiella solen (mot den, bort från den och sidledes) samt snäva på‑plats‑svängar. De upprepade dessa banor i långsam gångfart och i tio gånger snabbare körningar, under flera belysningsförhållanden, ibland med roverarnas strålkastare på och ibland av. Totalt innehåller SPICE‑HL3 88 tids‑synkroniserade sekvenser, nästan 1,3 miljoner bilder och matchande rörelse‑ och referensdata. Bilderna täcker både statiska scener som lämpar sig för noggrann analys och snabba sekvenser som utsätter system för rörelseoskärpa och exponeringstest. Allt är paketerat i en tydligt organiserad filstruktur, med kalibreringsfiler som beskriver exakt hur varje kamera och sensor är orienterad och hur deras klockor är synkroniserade i tid.
Att sätta enstaka‑fotonseendet på prov
Bortom att bara publicera data kontrollerade teamet kvaliteten och användbarheten i de inspelade bilderna. De jämförde hur SPAD, monokromkameran och stereokameran hanterade några av de svåraste visuella situationerna: skymnings‑ och nattkörningar samt körningar där rovern tittade direkt mot "solen". Med enkla bildkvalitetsmått och visuell inspektion fann de att enstaka‑fotonkameran konsekvent bevarade struktur i både ljusa och skuggade regioner, bibehöll ett brett dynamiskt omfång och var stabil över en mängd olika förhållanden. Konventionella kameror presterade väl när scenen var väl upplyst, men de förlorade antingen detaljer i mycket mörka områden eller överskattade höjdpunkter nära ljuskällan. Författarna verifierade också att vanliga kartläggnings‑ och lokalisationsprogram framgångsrikt kunde bearbeta datasetet, vilket bekräftar att tidsstämplar, kalibreringar och format är robusta nog för verklig robotikforskning. 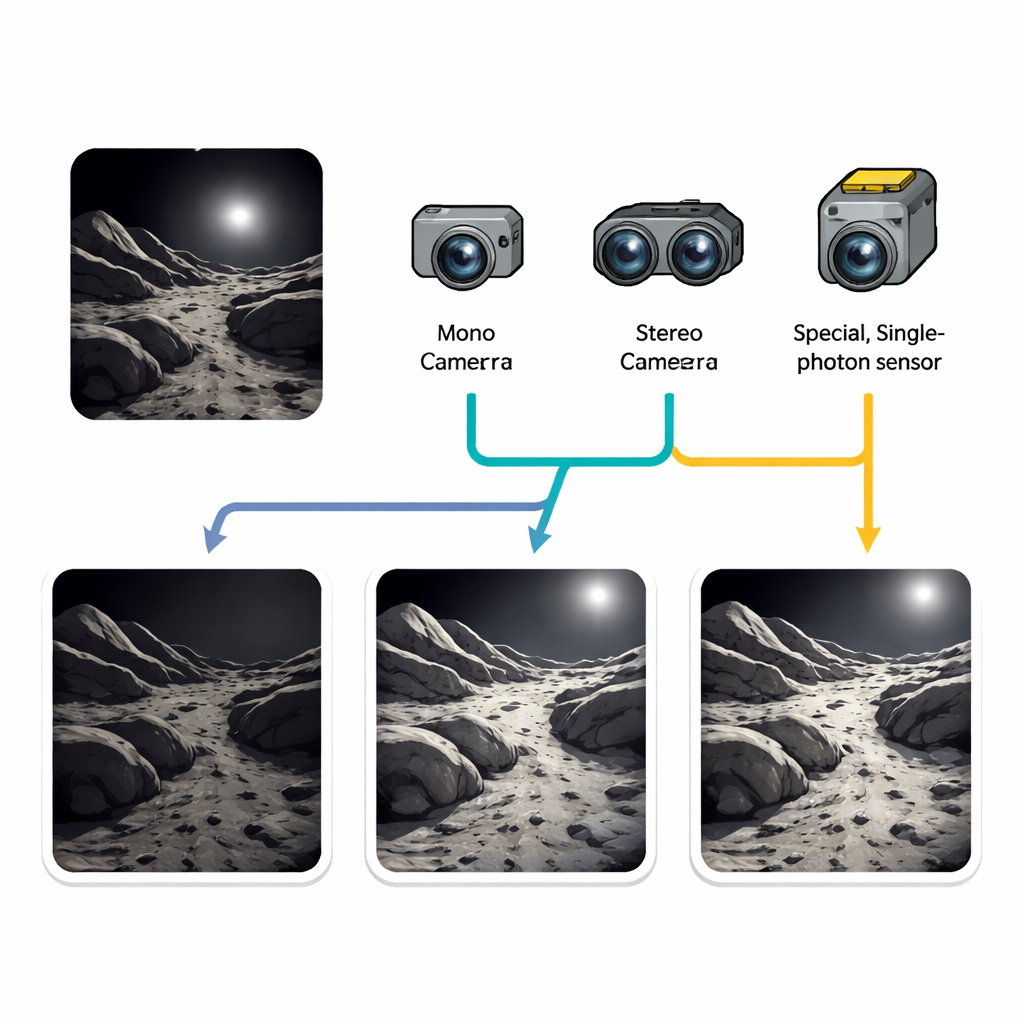
Begränsningar, förbehåll och varför detta är viktigt
Även om LunaLab inte kan återskapa de mycket små dammpartiklarna och de subtila ljusspridningseffekterna i verklig månjord fullständigt, och viss oavsiktlig infraröd glöd från rörelsefångstsystemet smög sig in i de mörkaste scenerna, menar författarna att SPICE‑HL3 ändå representerar en krävande "worst‑case" optisk miljö för roverseende. För ingenjörer och forskare som förbereder uppdrag till månens poler—eller som designar robotar för vilken dämpad, högkontrastmiljö som helst—erbjuder datasetet en sällsynt, offentligt tillgänglig referenspunkt. Det gör det möjligt att rättvist jämföra ny kamerateknik som SPAD‑sensorer mot traditionella system, förbättra navigations‑ och kartläggningsalgoritmer och i slutändan bidra till att framtida roverar kan fortsätta röra sig säkert genom månens föränderligt skuggiga landskap i stället för att bli strandsatta i mörkret.
Citering: Rodríguez-Martínez, D., van der Meer, D., Song, J. et al. SPICE-HL3: Single-Photon, Inertial, and Stereo Camera dataset for Exploration of High-Latitude Lunar Landscapes. Sci Data 13, 374 (2026). https://doi.org/10.1038/s41597-026-06668-8
Nyckelord: måne‑robotik, planetär navigering, enstaka‑fotonavbildning, robotseende-dataset, extrem belysning