Clear Sky Science · sv
Skalbar in situ-tillverkning av multimodal elektronisk hud för intelligenta robotar och interaktiva system
Att ge robotar och leksaker känsel
Tänk dig en robot som varsamt kan plocka upp en skiva varm rostat bröd utan att krossa den eller bränna din hand, eller en leksak som reagerar olika när du kramar den, böjer dess öra eller värmer den med din handflata. Den här forskningen beskriver en ny typ av ”elektronisk hud” som för dessa idéer närmare verkligheten genom att ge maskiner en rikare, mer människoliknande känsel och förmåga att uppfatta omgivningen i närheten.
Varför maskiner behöver bättre känsel
Dagens robotar och prylar är fortfarande klumpiga när de hanterar den verkliga världen. Många kan endast uppfatta en enda sak, till exempel tryck, och förlitar sig ofta på skrymmande, handmonterade komponenter som är svåra att skala upp. Men människohud blandar konstant många signaler samtidigt: lätt beröring, fast tryck, töjning, värme och till och med en känsla av hur nära objekt är innan kontakt. Författarna till denna studie ville bygga en elektronisk version av hud som kan fånga flera av dessa sensationer samtidigt, samtidigt som den är tunn, flexibel och lätt att anpassa för olika uppgifter.
Att bygga en tunn, flexibel känsel
Timmade ett lågprofils ”e-hud” med en renrumfri process som kan skalas och snabbt anpassas. I dess kärna finns en flexibel kopparbana mönstrad med ultraviolett laser, som fungerar som ledningar i ett kretskort men kan böjas och lindas runt kurvor. Ovanpå och under denna krets lade de ett mjukt silikonlager fullt av små luftporer, ungefär som en svamp. Ytorna är belagda med en tunn film av kolnanorör, som bildar ett ledande skal som både skyddar enheten från elektriskt brus och fungerar som ett gemensamt referenslager för mätningar. Denna stapling låter varje sensorplatta fungera som en liten elektrisk kondensator vars värde skiftar när materialet trycks, böjs, värms eller förs nära ett objekt. Ytterligare små chip monterade på samma flexibla krets mäter temperatur och avstånd utan kontakt, så hela arket efterliknar inte bara hudens tryck- och töjningsreceptorer utan även känslan av värme och nära syn. 
Hur sensorerna känner tryck och rörelse
Tryck- och böjdelarna av e-huden är utformade för att reagera kraftigt på små förändringar samtidigt som de förblir hållbara. När något trycker ner komprimeras porerna i det mjuka lagret, vilket för de inre metallagren närmare varandra och ersätter luft med mer silikon. Båda effekterna höjer den elektriska signalen, särskilt vid låga tryck där materialet är lättast att klämma ihop. Tester visade att e-huden kan upptäcka mycket försiktiga beröringar, ner till några tiotals pascal, med snabb respons och liten drift även efter tiotusen tryck-och-frisläpp-cykler. När arket böjs viker det sig runt den inre ledningen och minskar återigen gapet mellan lagren på ena sidan, vilket förstärker signalen. Responsen blir tydligare vid större böjvinklar, vilket stämmer överens med hur verkliga böjningar tenderar att lokalisera sig till ett område snarare än att spridas jämnt. Sammantaget balanserar designen mjukhet, stabilitet och känslighet utan de komplexa staplade strukturer som används i många tidigare enheter. 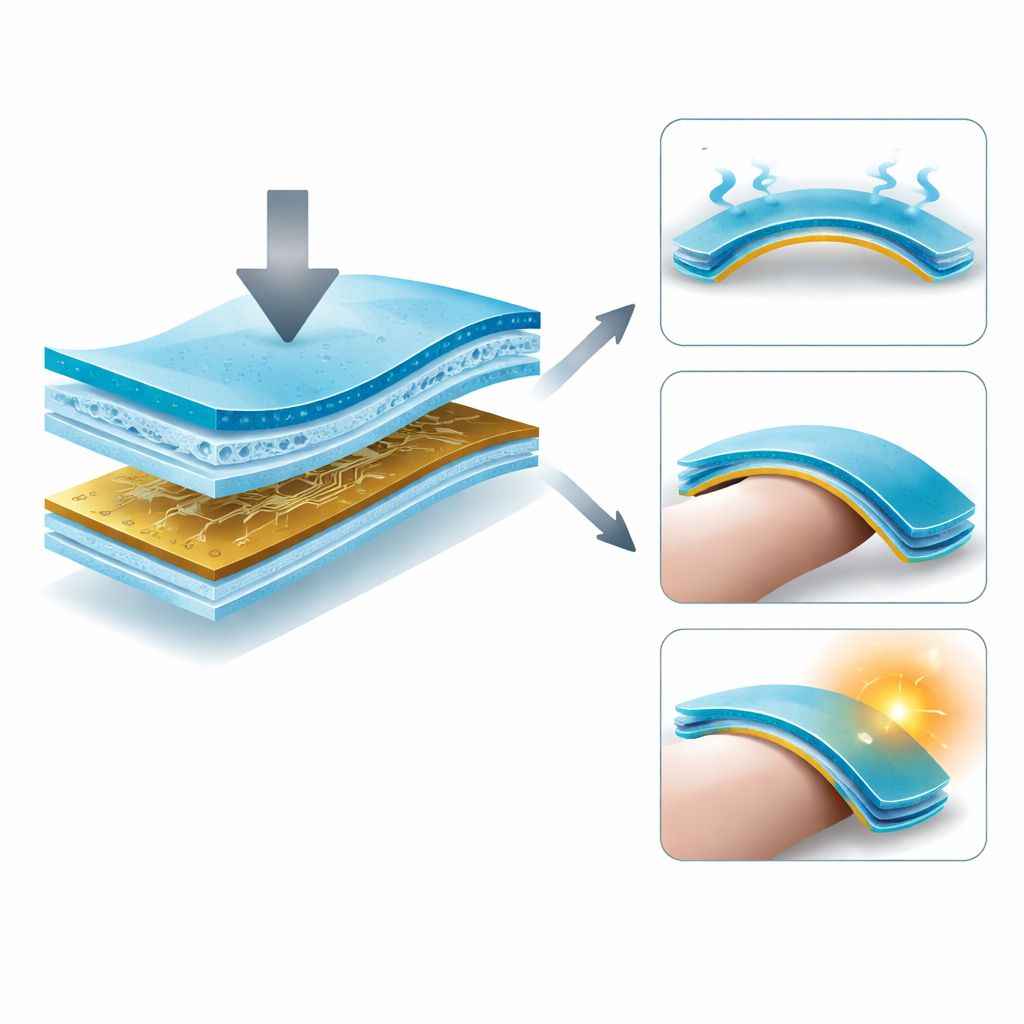
Från köksrobotar till lekfulla följeslagare
För att visa vad denna e-hud kan göra svepte forskarna den runt en robotisk gripare och gav roboten en uppgift i köksstil. När griparen rör sig mot en het brödskiva kartlägger en liten inbäddad djupsensormodul först hur långt objektet är, vilket hjälper roboten att rikta in sina fingrar innan kontakt. När kontakt väl är uppnådd styr tryck- och böjsensorerna hur hårt den klämmer, för att förhindra att brödet glider eller krossas. En temperatursensor på samma ark kontrollerar när brödet svalnat tillräckligt för att säkert lämnas över till en person. I ett annat exempel byggde teamet en mjuk elefantleksak täckt med e-hud. Att trycka på bröstet ändrar rytmen hos en dold vibrationsmotor så att det känns som ett hjärtslag, att böja ett öra triggar ljud och värmen från en hand kan få leksakens kinder att lysa upp — vilket förvandlar beröring till en lekfull, emotionell interaktion.
Att se mönster av tryck över en yta
Bortom enskilda punkter kan samma tillverkningsmetod forma stora trycksensorfält som avläser var och hur kraftigt en yta berörs. Teamet demonstrerade ett 8 gånger 15-rutnät som fungerar som en tryckkamera: när fingrar, vikter eller stämplade former trycks ner rekonstruerar systemet kraftmönstret och identifierar till och med konturer som bokstäver. Denna förmåga att fånga tryckkartor och masscentrum kan hjälpa robotar att balansera laster, känna igen föremål eller fungera som smarta vågplattformar och interaktiva ytor. Eftersom den underliggande processen är snabb och modulär kan designers justera storlek, avstånd och mjukhet hos sensornas pixlar för olika användningsområden, från smarta möbler till hållningsövervakande mattor.
Vad detta betyder för vardagsteknik
Genom att kombinera flera senslägen — tryck, böjning, värme och närhet — i ett enda, tunt och lätt anpassningsbart ark, för detta arbete den elektroniska huden mycket närmare människohudens subtila förmågor. Även om det finns utrymme att förbättra prestanda vid mycket höga tryck och att automatisera vissa monteringssteg, visar tillvägagångssättet redan att rik taktil förmåga kan läggas till robotar, leksaker och andra enheter utan tunga, handbyggda komponenter. I praktiken kan detta leda till hemrobotar som hanterar ömtåliga föremål säkrare, medicinska bärbara enheter som spårar kroppskontakt bekvämare och interaktiva produkter som svarar på vår beröring på betydligt mer naturliga sätt.
Citering: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
Nyckelord: elektronisk hud, taktil sensing, flexibla sensorer, robotisk gripare, interaktiva enheter