Clear Sky Science · sv
Jämförelse av klinostatstyrningsstrategier för att uppnå simulerad mikrogravitation med enhetlig fördelning av gravitationsvektorn
Varför jordbaserade forskare bryr sig om viktlöshet
Rymden förändrar levande organismer på överraskande sätt, från att försvaga ben och muskler till att påverka immunceller. För att förstå dessa effekter behöver forskare utsätta celler, växter och smådjur för viktlöshet i timmar, dagar eller till och med veckor. Men verkliga rymdfärder är dyra och sällsynta. Denna artikel undersöker hur man kan förbättra en bordsmodell kallad klinostat för att bättre efterlikna mikrogravitation här på jorden, så att laboratorieexperiment mer troget kan stå för de som görs på Internationella rymdstationen.
Vi snurrar oss fram till fejkad viktlöshet
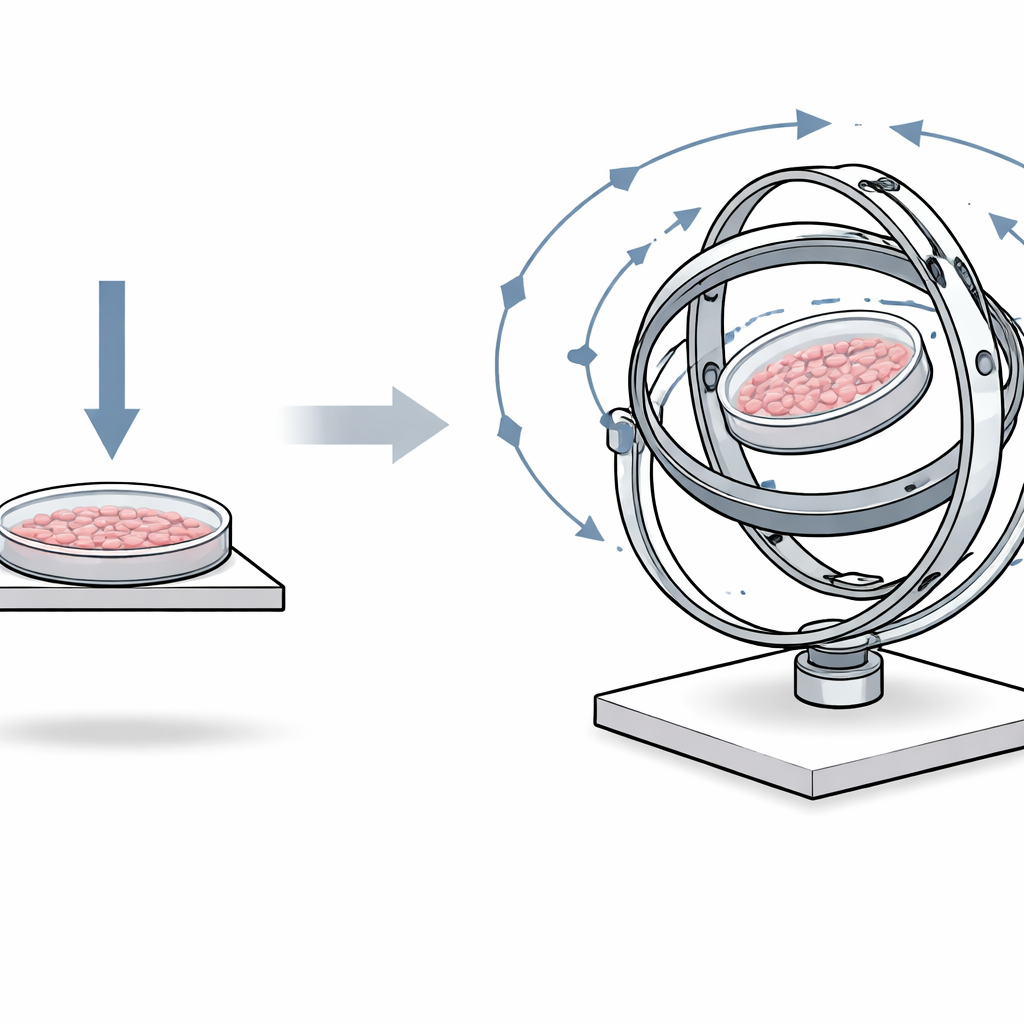
En klinostat försöker att ”stänga av” tyngdkraften inte genom att ta bort den, utan genom att ständigt ändra riktningen den drar åt. Prover monteras på en liten inre plattform som drivs av två vinkelräta motorer. När plattformen tippar och vrider sig sveper gravitationsriktningen, sedd från provets perspektiv, över alla möjliga vinklar. Med tiden kan dessa änderliga dragningar i genomsnitt bli nära noll i nettoeffekt, ett tillstånd som kallas tidsmedelvärdessimulerad mikrogravitation. Tidigare arbete har visat att celler och växter i sådana förhållanden kan bete sig mycket likt hur de gör i verklig rymdfärd, vilket gör klinostater till värdefulla verktyg för rymdbiologi.
Det dolda problemet med gravitations‑hotspots
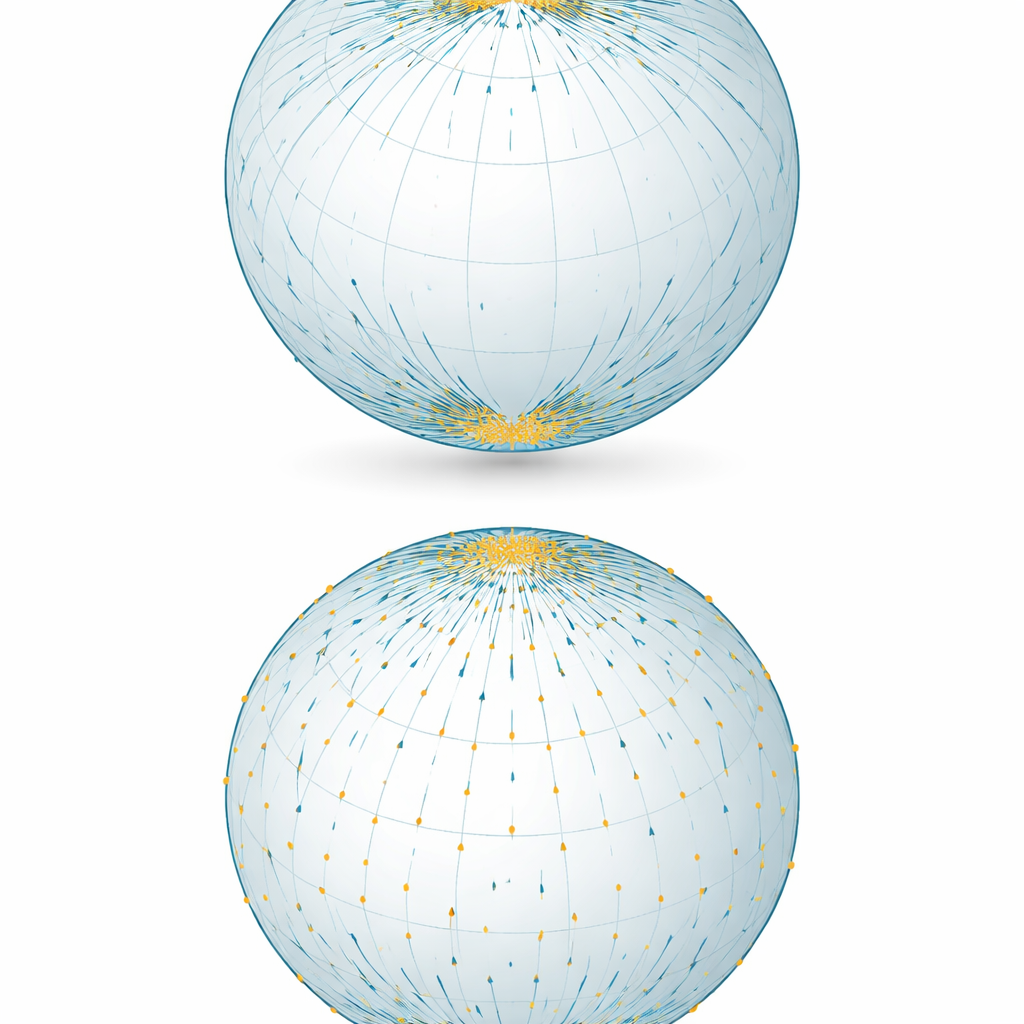
Det finns dock en hake. På grund av geometrin i de roterande ramarna sprider sig den upplevda gravitationsriktningen inte jämnt över alla vinklar. När den yttre motorn snurrar med konstant hastighet tenderar gravitationsriktningen att tillbringa för mycket tid nära två motsatta regioner på den imaginära sfären som representerar alla orienteringar. Dessa ”poler” blir gravitationshotspots. Även om genomsnittskraften över många timmar är nära noll känner provet upprepade gånger gravitationen komma oftare från bara två riktningar istället för från alla riktningar lika mycket. Många klinostatstudier förbisedde antingen detta problem eller försökte lösa det genom att slumpmässigt variera rotationshastigheten, men författarna visar att slumpmässighet i sig inte botar problemet.
Att utforma ett smartare snurrmönster
Gruppen jämförde fyra sätt att styra klinostatens yttre motor: konstant hastighet, hastigheter slumpmässigt valda inom ett intervall, ett enkelt sinusmönster där hastigheten ökar och minskar med vinkeln, och ett särskilt utformat ”reciprokt sinusmönster” baserat på hur yta förändras över en sfär. Med datorbaserade simuleringar spårade de var gravitationsriktningen landade över tid och definierade två numeriska mått: hur koncentrerad den var inom polregionerna och hur jämnt den spreds över olika ”latitudband” på sfären. De mätte också hur lång tid varje strategi tog för att sänka tidsmedelvärdesgravitationen under en tusendel av jordens gravitation, en vanlig standard för experiment i simulerad mikrogravitation.
Utplåna polerna utan att förlora mikrogravitation
Resultaten var tydliga. Både strategin med konstant hastighet och den med slumpmässig hastighet gav starka poler: gravitationsriktningen var upp till ungefär femton gånger tätare nära polerna än i genomsnitt. Den slumpmässiga metoden bröt upp enkla upprepande banor men lämnade den övergripande ojämnheten nästan oförändrad. Det enkla sinusmönstret hjälpte något, men när skillnaden mellan dess min- och maxhastighet ökades för att minska polerna pressade det gravitationsfördelningen för långt åt andra hållet, så att vissa mellanlatitudregioner underrepresenterades och områden nära latitud nedsampling skedde och låg-latitudregioner överrepresenterades. I kontrast krympte det reciproka sinusmönstret — där motorn rör sig snabbare nära polerna och långsammare nära ekvatorn på ett exakt matematiskt sätt — polkoncentrationen till nästan uniforma nivåer när kvoten mellan max- och minhastighet var tillräckligt hög. Även om denna strategi gjorde tiden att nå mycket låg genomsnittlig gravitation något längre (runt sex timmar och inte snabbare) är den fördröjningen försumbar för typiska experiment som pågår tolv timmar eller mer.
Att testa teorin i verkliga världen
För att se om dessa vinster höll utanför datorn byggde författarna en tvåaxlig klinostat med handelsmässiga servomotorer och sensorer. De drev den yttre motorn med det reciproka sinusmönstret vid flera hastighetskvoter och registrerade systemets rörelse på två oberoende sätt: genom att läsa motorernas kodare och genom att mäta orientering med en tröghetssensor monterad på det snurrande inre stadiet. Båda metoderna överensstämde väl med simuleringarna, med bara några procents avvikelse. När kvoten mellan max- och minimihastighet ökade försvagades de observerade gravitationspolerna precis som förutsagts. Den tidsmedelvärdessatta gravitationen i den verkliga apparaten nådde inte riktigt det strikta målet på en tusendel av jordens gravitation på grund av små mekaniska obalanser, men beteendet under de första timmarna speglade ändå den teoretiska trenden.
Vad detta betyder för framtida rymdbiologi på jorden
För forskare som förlitar sig på jordbaserade ersättare för rymdflygning är budskapet enkelt: hur du snurrar en klinostat är lika viktigt som hur snabbt du snurrar den. Att bara rotera med konstant hastighet eller skaka hastigheten slumpmässigt lämnar dolda gravitationshotspots som kan påverka hur celler och vävnader reagerar. Genom att noggrant forma rotationen så att plattformen snabbt passerar polregionerna och dröjer där ytan är större kan experimentutförarna ge sina prover en mycket jämnare upplevelse av alla möjliga ”ner”-riktningar. Studien tyder på att antagandet av denna reciproka sinusstyrstrategi kommer att göra klinostatexperiment mer trogna ersättare för liv i omloppsbana, utan att tillföra extra mekanisk komplexitet eller avsevärt förlänga experimenttiderna.
Citering: Kim, Y.J., Park, S. & Kim, S. Comparison of clinostat control strategies to achieve simulated microgravity with uniform gravity vector distribution. npj Microgravity 12, 21 (2026). https://doi.org/10.1038/s41526-026-00570-8
Nyckelord: simulerad mikrogravitation, klinostat, fördelning av gravitationsvektorn, rymdbiologi, styralgoritmer