Clear Sky Science · sv
Snabbsimmande biohybrid OstraBot med självtränade högstarka muskler
Muskeldrivna robotar tar språnget
Föreställ dig små simmande maskiner drivna inte av elektriska motorer utan av levande muskler odlade i labbet. Denna studie visar hur forskare lärde konstruerad muskel att själv träna sig till en mycket starkare ”motor” och sedan använde den för att driva en miniatyr fiskliknande robot som simmar snabbare än någon tidigare maskin driven av skelettmuskulatur. Arbetet pekar mot framtida mjuka robotar som är effektiva, anpassningsbara och delvis levande.
Varför biohybrida muskler är viktiga
Robotar förlitar sig vanligtvis på styva motorer eller luftdrivna cylindrar. Dessa fungerar väl, men kan vara tunga, bullriga och dåligt anpassade till mjuka, flexibla rörelser hos levande varelser. Konstruerade muskler drivs däremot av enkla näringsämnen, kan reparera sig till viss del och anpassa sig när de används—likt våra egna kroppar efter träning. Problemet har varit kraften: labbodlade skelettmuskler, särskilt de som framställs från de vanliga C2C12‑cellerna, producerar oftast för lite kraft för att snabbt förflytta robotar eller bära större laster. De flesta tidigare enheter har krupit eller simmat långsamt eftersom deras muskel”motorer” helt enkelt var för svaga.
Ett självtränande gym för levande vävnad
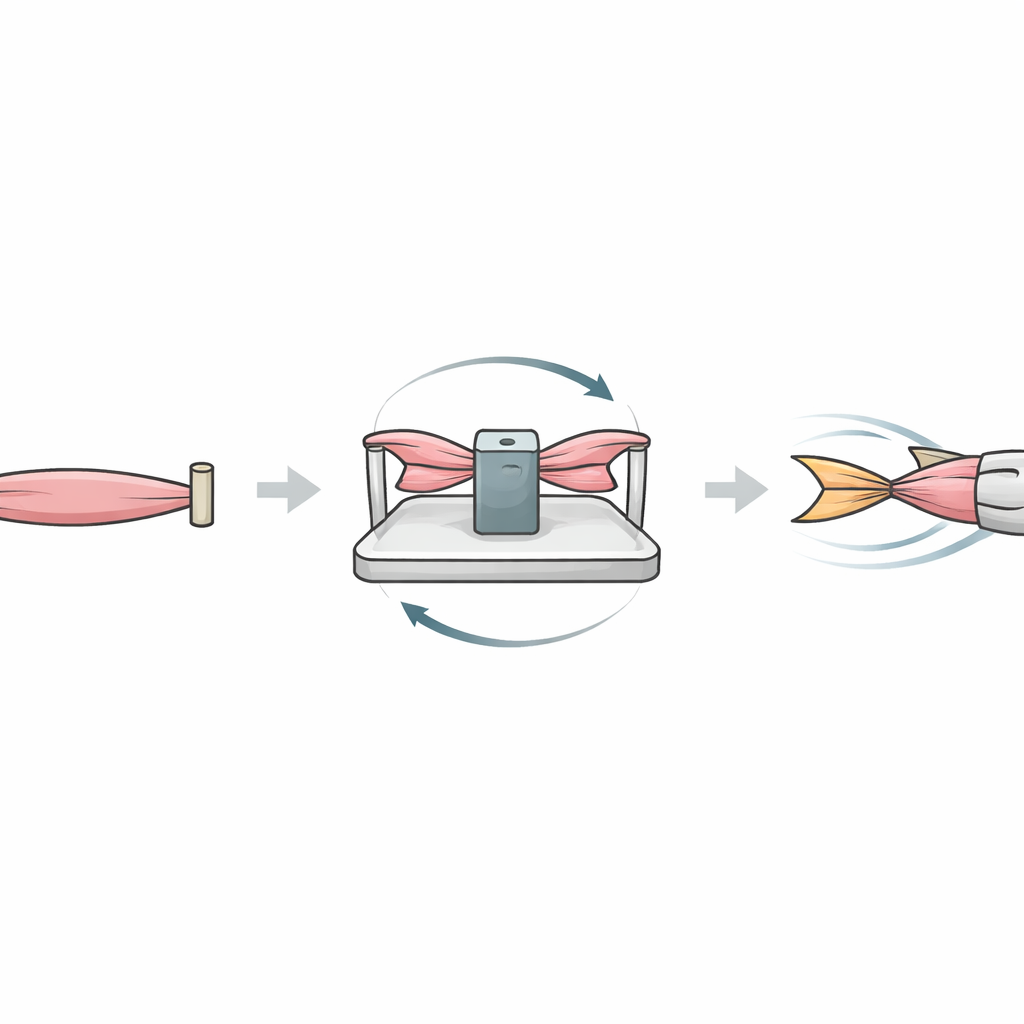
Forskarna löste detta genom att ge muskelvävnaden ett inbyggt träningsprogram. De formade ringformade muskelkonstruktioner av C2C12‑celler inbäddade i en mjuk gel och flyttade sedan par av dessa ringar till en specialanordning inspirerad av armbrytning. Varje muskelring var förankrad i ena änden och kopplad i andra änden till en gemensam glidblock, så att när en muskel kontraherade stretchade den sin partner, varefter rollerna vände. Avgörande var att dessa vävnader tidigt i sin utveckling naturligt ryckte till av sig själva, även utan elektrisk stimulans. Enheten omvandlade denna spontana ryckning till kontinuerliga fram‑och‑tillbaka träningscykler, vilket förlängde och förkortade båda musklerna tusentals gånger utan mänsklig inblandning eller extern mekanik.
Bygga starkare, mer hållbara muskelmotorer
För att avgöra om denna självträning verkligen spelade roll jämförde teamet tre sätt att mogna muskler: ett mycket mjukt stöd som tillät rörelse men gav liten motståndskraft, ett mycket styvt stöd som höll längden men knappt rörde sig, och deras parvisa självträningsplattform. Under mikroskopet utvecklade de självtränade musklerna tjockare, mer uppradade fibrer med tydliga inre bandningsmönster förknippade med mogen muskulatur. Kraftmätningar bekräftade den visuella skillnaden: självtränade vävnader genererade cirka sju millinewton kraft—flera gånger högre än muskler odlade på konventionella plattformar och det högsta som rapporterats hittills för denna celltyp i robotar. De bibehöll också starka kontraktioner i veckor, vilket tyder på att träningen inte bara ökade vävnadens massa utan också hjälpte den att förbli funktionell över tid.
Designa en snabb boxfisk‑inspirerad simmare
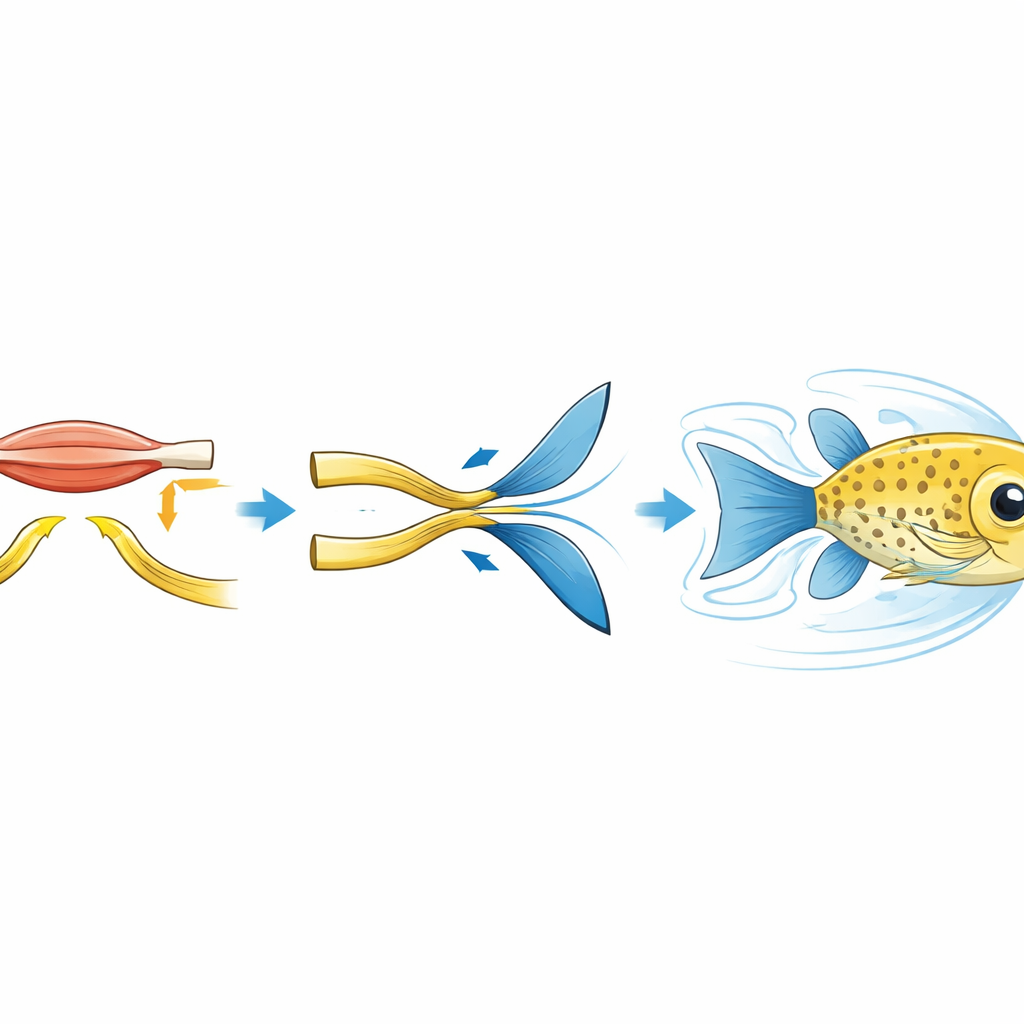
Med starkare muskel började forskarna bygga en liten simrobot de kallar OstraBot, modellerad på boxfisksliknande rörelsemönster. I detta simläge förblir kroppen i stort sett styv medan framdrivningen kommer från sid‑ eller bakre stjärtpartier som fladdrar fram och tillbaka. OstraBots kropp är en lätt 3D‑utskriven flottör, dess ”senor” är flexibla balkar som överför kraft och de dubbla stjärtarna fungerar som paddlar. När muskelremsan kontraherar under elektrisk stimulans böjer den senorna, vilka i sin tur viftar med stjärtarna och skjuter vattnet bakåt. För att få ut mesta möjliga av sin levande motor byggde teamet en matematisk modell som kopplade hur muskeln kontraherar till hur roboten rör sig. Genom att behandla senorna som fjädrar och det omgivande vattnet som en dämpningskraft, och genom att inkludera biologiskt realistiskt muskelbeteende, kunde de förutsäga vilka kombinationer av senstyvhet och stimulationsfrekvens som skulle ge mest mekaniskt arbete och därmed störst simhastighet.
Finjustera sweet spot för fart och kontroll
Modellen avslöjade en ”Guldlockszon”: senor som var för styva böjde sig knappt och slösade bort muskelns kraft, medan för mjuka senor flexade mycket men inte tryckte effektivt mot vattnet. Mellanstor styvhet, kombinerad med en måttlig slagfrekvens, tillät muskeln att utföra maximal nyttig arbete varje cykel. Experiment bekräftade dessa förutsägelser. Robotar med medelhårda senor simmade mycket snabbare än de med mjuka eller styva, och nådde hastigheter omkring 467 millimeter per minut, eller mer än femton kroppslängder per minut—ett rekord för biohybrida simmare drivna av skelettmuskulatur. Teamet kunde ytterligare finjustera hastigheten genom att justera antingen hur ofta de pulserade muskeln eller hur starkt det elektriska fältet var, och de demonstrerade till och med start‑ och stoppstyrning via en ljudutlösare. När roboten stördes eller trycktes bakåt återhämtade den sig snabbt och återupptog framåtrörelsen, tack vare sin starka muskelkraft och välmatchade mekanik.
Vad detta betyder för framtida levande maskiner
För icke‑specialister är huvudbudskapet att levande muskel nu kan tränas och engineeras för att konkurrera med, och potentiellt överträffa, många syntetiska mjuka aktuatorer i styrka och respons. Genom att låta vävnader själva träna via en smart mekanisk lösning, och genom att använda en realistisk modell för att styra robotens design, övervann forskarna ett stort prestandahinder inom biohybrid robotik. Deras angreppssätt kan appliceras på andra celltyper, större system och mer komplexa maskiner, och bana väg för mjuka robotar som är effektiva, anpassningsbara och djupt inspirerade av hur verkliga djur rör sig.
Citering: Chen, P., Wang, X., Zhou, J. et al. Fast-swimming biohybrid OstraBot with self-trained high-strength muscles. Nat Commun 17, 2246 (2026). https://doi.org/10.1038/s41467-026-70259-9
Nyckelord: biohybrida robotar, konstruerad muskel, mjuk robotik, simmande mikrorobotar, vävnadsteknik