Clear Sky Science · sv
Biomimetisk ställdon tillverkat av en relaxor ferroelectric polymernanokomposit
Små robotar som rör sig som riktiga insekter
Föreställ dig en robot i storlek med en larv som kan krypa över ojämn terräng, eller en fjärilsliknande anordning som flaxar med vingarna och lyfter från marken — men som ändå är gjord av ett enda pappers tunt plaststycke och använder mindre energi än en nattlampa med LED. Denna artikel beskriver en ny sorts mjukt material som kan fungera som artificiell muskel, vilket gör sådana insektsstora robotar enklare, lättare och mer energieffektiva än tidigare.
Varför små, mjuka maskiner spelar roll
Miniatyrrobotar inspirerade av insekter skulle kunna krypa in i kollapsade byggnader för att söka efter överlevande, slingra sig genom rör för att inspektera infrastruktur eller tyst övervaka grödor och skogar. För att fungera i dessa trånga och oförutsägbara miljöer måste de vara små, flexibla och tåliga, samtidigt som de förbrukar mycket lite energi. Många nuvarande konstruktioner förlitar sig på komplicerade sammanställningar av kugghjul, gångjärn och flera material, vilket ökar vikten, slösar energi och är svårt att krympa ytterligare. Författarna menar att den idealiska lösningen är ett enda material som både kan skapa rörelse och överföra den direkt, likt verklig muskel i djur.
En smart plast konstruerad från insidan och ut
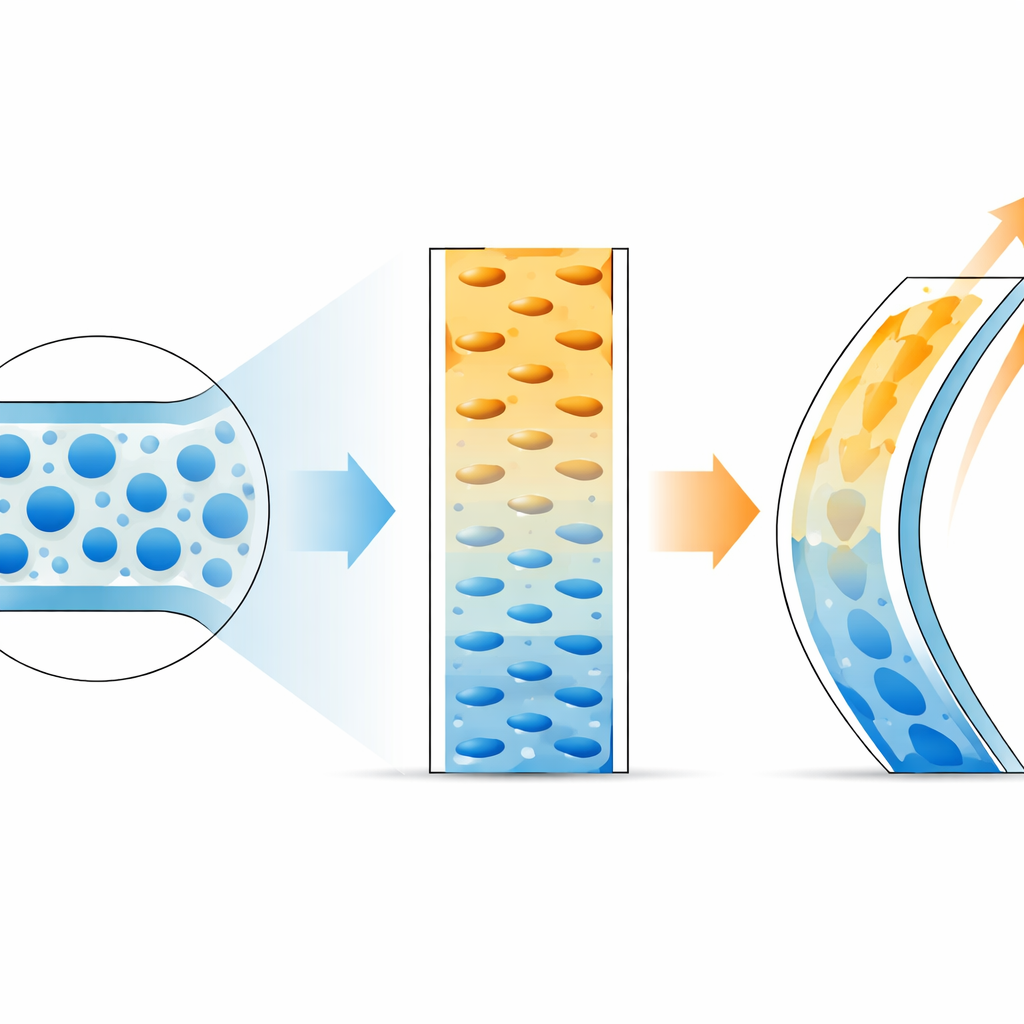
I centrum för detta arbete finns en tunn plastfilm baserad på en välkänd familj av material kallad PVDF, redan uppskattad för sin förmåga att deformeras när den utsätts för ett elektriskt fält. Forskarna blandar denna plast med små "polymerprickar", nanopartiklar täckta av kemiska grupper som kan bilda vätebindningar. När blandningen gjuts till en film och försiktigt värms i kontrollerad takt avdunstar lösningsmedlet snabbare från toppen än från botten. Denna ojämna torkning, tillsammans med vätebindningarna, uppmuntrar plastkedjorna nära bottenytan att rada upp sig i en högordnad, polariserad struktur, medan toppen förblir mindre ordnad. Resultatet är en inbyggd intern gradient genom tjockleken av ett enda skikt.
Från dold struktur till kraftfull rörelse
Denna subtila strukturella gradient ger stor mekanisk utdelning. När ett elektriskt fält appliceras över filmen reagerar den mer ordnade, starkt polariska bottenregionen mer än toppen, så en sida av remsan expanderar mer än den andra. Den obalansen får hela remsan att böja sig, påminnande om en klassisk bimetallremsa i en termostat, men här sker det i en helt organisk, flexibel film endast flera tiotals mikrometer tjock. Noggranna mätningar visar att filmen kan förändra längd med upp till cirka 14 procent och lagra mekanisk energitäthet som närmar sig den hos hårda keramiska ställdon — ändå förblir den mjuk och lätt. Jämfört med en annars identisk film utan polymerprickar eller gradientbearbetning ger det nya materialet flera gånger större töjning och omvandlar elektrisk energi till rörelse betydligt mer effektivt.
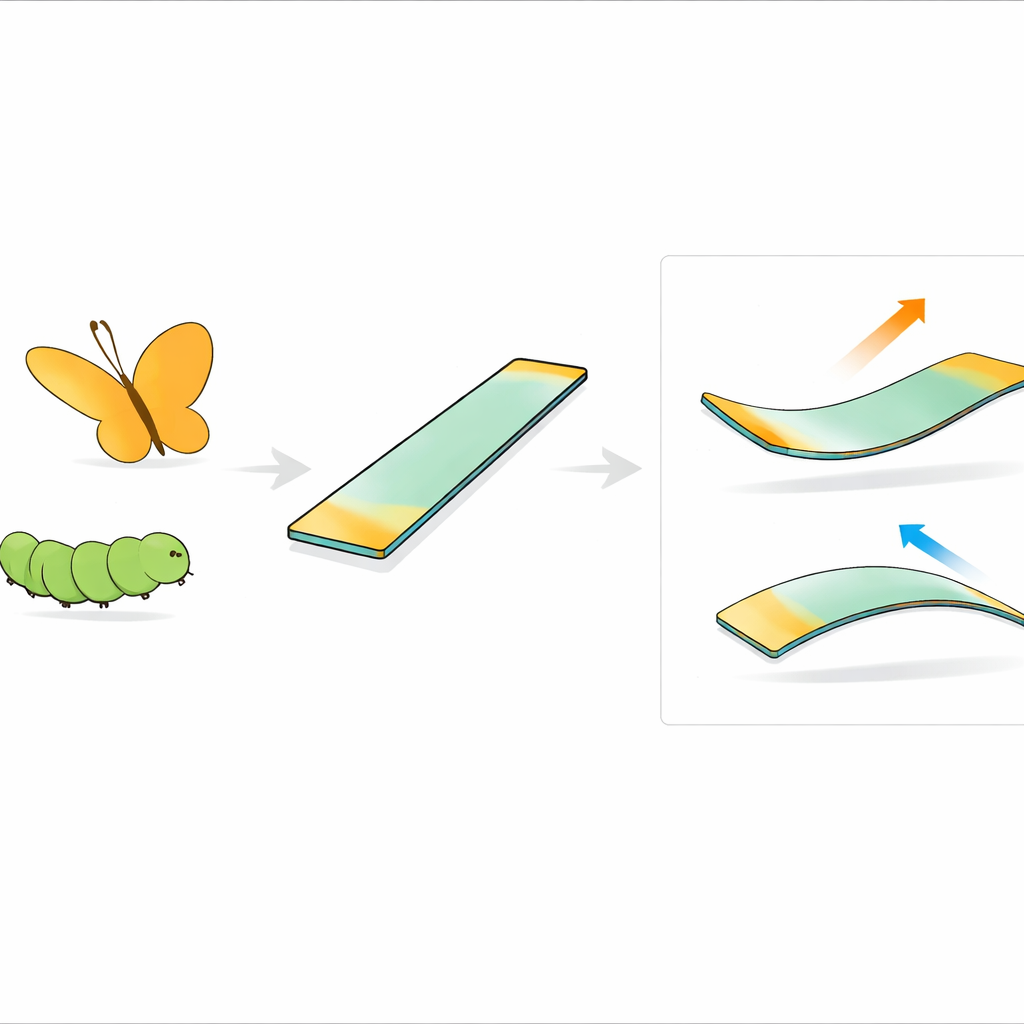
Bygga en krypande larv och en flygande fjäril
För att visa vad detta material kan åstadkomma i praktiken klipper teamet filmen i insektlika former och lägger till enkla kolbaserade elektroder och tunna kopparstöd. En konstruktion liknar en liten larv med en bredare mitt och smalnande ändar; när ett växelrikt elektriskt fält appliceras böjer remsan sig i ett rytmiskt mönster och kryper längs ett räfflat spår i hastigheter på flera kroppslängder per sekund, med en effektförbrukning på bara några milliwatt. En annan design efterliknar en fjäril, med en aktiv central region och flexibla vingar. Drivna av liknande elektriska signaler flaxar vingarna snabbt och kan lyfta enheten några millimeter från en plattform, till och med bära laster upp till tjugo gånger sin egen vikt — allt med en total aktuatormassa på ungefär 50 milligram.
Vad detta innebär för framtidens små robotar
Denna studie visar att genom att noggrant konstruera hur ett plastmaterial är organiserat från ena sidan till den andra går det att skapa ett enda, ultratunt skikt som böjer sig kraftigt under ett elektriskt fält och kan driva komplexa, livlika rörelser. Även om de nuvarande enheterna fortfarande kräver relativt höga spänningar, gör deras extremt låga energiförbrukning och fjäderlätta konstruktion dem till lovande byggstenar för framtida insektsstora robotar och smarta apparater. Med ytterligare förbättringar för att sänka driftspänningen skulle liknande filmer en dag kunna möjliggöra flottor av små, autonoma maskiner som kryper, flaxar och utforskar världen med artificiella muskler bara ett hårstrås tjocklek.
Citering: Chi, H., Bai, P., Zhou, Z. et al. Biomimetic actuator crafted from a relaxor ferroelectric polymer nanocomposite. Nat Commun 17, 2155 (2026). https://doi.org/10.1038/s41467-026-70165-0
Nyckelord: mjukrobotik, artificiella muskler, polymeraktuatorer, insektsskaliga robotar, elektroaktiva material