Clear Sky Science · sv
Handliknande autonom flygande robot för luftburna grip- och interaktionsuppgifter
Flygande hjälpare du nästan kan skaka hand med
Föreställ dig en liten flygande robot som inte bara kan filma omgivningen utan också öppna en dörr, ge dig en dryck eller plocka ett paket från en svåråtkomlig hylla. Denna studie presenterar precis den typen av apparat: en kompakt drönare där kroppen samtidigt fungerar som en hand. Genom att blanda idéer från fågelflygning och mänskligt grepp visar forskarna hur luftburna robotar kan gå från att bara observera till att bli aktiva hjälpare i hem, fabriker och räddningsinsatser.
Från flygande kameror till flygande händer
De flesta drönare idag är ”flygande ögon” som används för fotografering, kartläggning eller inspektion. När ingenjörer försöker lägga till robotarmar så att drönare kan gripa eller trycka på saker blir maskinerna snabbt klumpiga, tunga, energikrävande och svåra att styra—särskilt inomhus eller nära människor. Författarna angriper problemet genom att ompröva drönarens kropp i sig. Istället för att skruva fast en separat arm utformar de hela ramen för att fungera som en hand som kan sluta sig kring objekt, slå sig ned på stolpar eller träd och ändå flyga smidigt genom trånga utrymmen.
En handformad flygande kropp
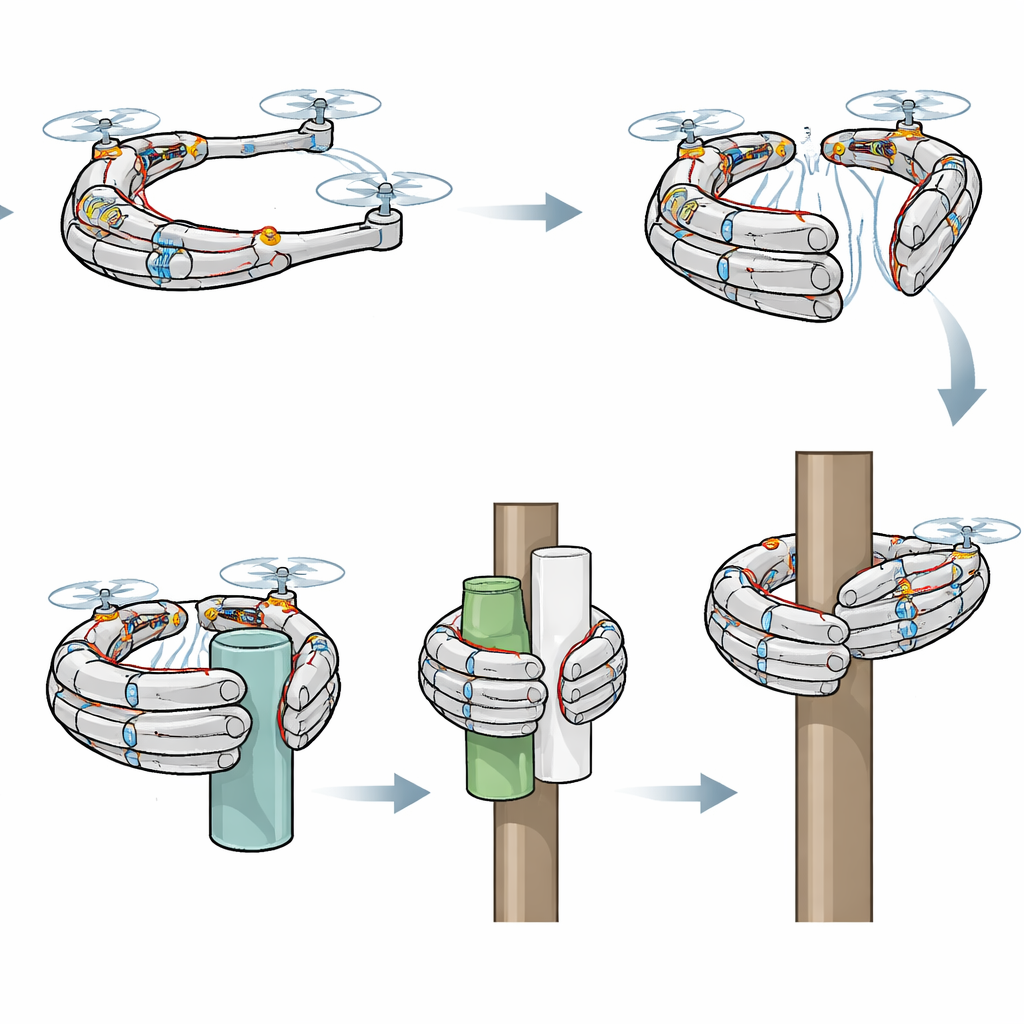
Den nya roboten, kallad HI‑ARM, är ungefär i storlek och vikt som en vuxen hand. Dess ram bildar en öppen C‑form som påminner om en böjd handflata med fingrar. Inuti denna ring finns teleskopiska segment och vridbara leder, drivna inte av många motorer utan av en enda sena‑liknande kabel som dras av en servo. Fjädrar tillåter strukturen att böjas och sedan fjädra tillbaka till sin ursprungliga form, vilket lagrar och frigör energi liknande muskler och senor. Denna underaktuaterade design låter roboten anpassa sig runt okända objekt: när kabeln dras åt komprimeras och vrids olika delar tills de naturligt formar sig efter det som greppas.
Hur roboten tänker och flyger
För att göra denna formbara kropp användbar bygger teamet en flerskiktad ”hjärna” för roboten. En del planerar var drönaren ska flyga och när den ska gripa, öppna eller slå sig ned, baserat på ett bibliotek av grundläggande handlingar som ”grip”, ”släpp” eller ”sätt sig på stolpe”. En annan del översätter dessa planer till mjuka banor i rummet som drönaren kan följa i realtid. Ett snabbt styrsystem uppskattar kontinuerligt robotens position, den förskjutna tyngdpunkten när kroppen deformeras, och de extra krafter som uppstår när den plockar upp eller trycker mot objekt. Adaptiva algoritmer känner av dessa störningar och ökar eller ombalanserar automatiskt draget från de fyra propellrarna så att flygningen förblir stabil även när kroppen klämmer en flaska eller trycker upp en dörr.
Vad denna flygande hand kan göra
I inomhustester utför HI‑ARM välkända människoliknande handlingar. Den använder sin ”handflata” för att greppa och bära en full vattenflaska längs en precis flygbana, och sina ”finger-toppar” för att nypa och lyfta en tunn servett—en särskilt ömtålig uppgift för en maskin. Samma mekanism anpassar sig till leksaker, kartonger, påsar och udda formade block utan att behöva känna till deras form i förväg. Robotens kan flyga fram till en trädstam eller stolpe, klämma sig runt den, stänga av propellrarna och helt enkelt hänga kvar där, vilket använder betydligt mindre energi än att hovra. Den kan också närma sig en dörr, slå sig runt handtaget och dra upp dörren medan den håller balansen trots motkraften.
Hjälpa människor och arbeta utomhus
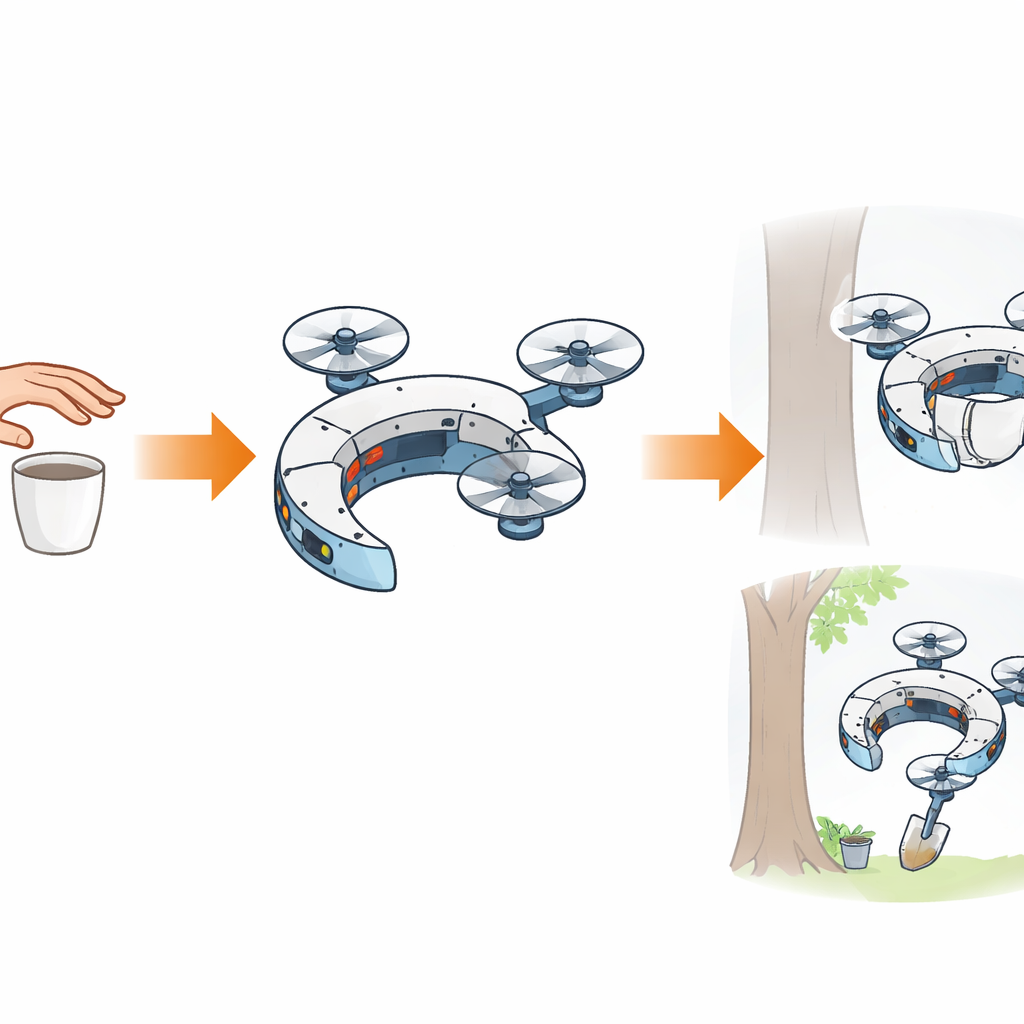
Forskarna utforskar också hur en sådan enhet kan interagera med människor. I en hemmaliknande scen tar drönaren ett paket ur en persons hand, lägger undan det, hämtar en dryck från ett bord, räcker över den, samlar senare in den tomma flaskan och slutligen sätter sig på en hatt- eller klädhängare för att vänta på nästa uppgift—allt i en kontinuerlig, mjuk sekvens. Med videoglasögon och en enkel enhandskontroll styr en person med begränsad rörlighet fjärrstyrt roboten för att plocka upp en kopp kaffe utomhus och föra tillbaka den över avstånd på tiotals meter. I utomhusprovningar sätter sig drönaren på bambu och stolpar, pressar sig igenom en smal klipppassage genom att krympa sin kropp och bär en dryck över en flod, vilket antyder roller inom leverans, inspektion och räddning.
Vad detta innebär för vardagen
Arbetet visar att en liten, handformad flygande robot kan kombinera smidigt flygande med förvånansvärt människoliknande sätt att greppa, slå sig ner och interagera med föremål och människor. Genom att tätt integrera kroppsdesign, rörelseplanering och adaptiv kontroll övervinner författarna många av de storleks- och stabilitetsproblem som hållit tillbaka tidigare luftmanipulatorer. Medan framtida versioner kommer att behöva bättre ombordvision och smartare beslutsfattande för att fungera helt autonomt, pekar denna studie mot en framtid där ”flygande händer” kan hjälpa till att leverera paket, assistera personer med funktionsnedsättningar, underhålla infrastruktur och utföra ömtåliga uppgifter på platser som är besvärliga eller farliga för människor att nå.
Citering: Wu, Y., Yang, F., Jin, R. et al. Hand-like autonomous flying robot for airborne grasping and interaction. Nat Commun 17, 2200 (2026). https://doi.org/10.1038/s41467-026-68967-3
Nyckelord: luftmanipulation, flygande robothand, droner, människa-robot-interaktion, biomimetisk robotik