Clear Sky Science · sv
En konstgjord bionisk sammansatt öga i insektsskala
Robotögon och -näsor i ett litet paket
Föreställ dig en robotinsekt som inte bara kan se vart den är på väg utan också “lukta” farliga gaser i luften — allt med en enhet inte större än en riktig flugögonkula. Denna artikel beskriver just en sådan konstruktion: ett miniatyrartificiellt sammansatt öga som kombinerar syn och lukt i en enda, ultralätt sensor. Genom att låna lösningar från bananflugor och andra insekter visar forskarna hur framtida drönare och små robotar snabbt och säkert kan navigera i trånga, farliga miljöer samtidigt som de använder mycket lite energi.

Vad naturen lärde ingenjörerna
Insekter som bananflugor förlitar sig på sammansatta ögon — kupoler fyllda med hundratals små linser — för att upptäcka rörelse över ett brett synfält, vilket hjälper dem att undvika rovdjur och hinder. Samtidigt ger deras antenner en fin känsla för lukt, så att de kan upptäcka föda, partners eller hot i luften. Båda informationsströmmarna kombineras i insektens hjärna för att styra snabba beslut. Författarna satte uppgiften att återskapa detta dubbla sinne i hårdvara: en enda, insektsskalaenhet som efterliknar flugans öga för vidvinkelrörelsedetektion och integrerar en kemisk “näsa” för att läsa av omgivande luft, för att sedan slå samman båda signalerna för smartare beteende.
Bygga ett litet krökt öga som verkligen fungerar
Teamet byggde ett cylindriskt konstgjort öga ungefär i storlek som ett litet insekthuvud och packade 1 027 små linser i en kvadrat bara 1,5 millimeter över. Med en ultrasäker 3D-utskriftsteknik printade de direkt en krökt mikrolinsmatris på ett flexibelt lager av organiska ljusdetektorer. Varje lins är i linje med en enskild detektor och bildar en individuell “pixel” som tittar i sin egen riktning, mycket likt en insektens ommatidium. Linserna är utformade med en smal acceptansvinkel så att ljus från en riktning inte läcker över till intilliggande pixlar, och efterliknar därmed den naturliga optiska isoleringen i riktiga sammansatta ögon. För att hantera dimma och fukt tillsatte forskarna mikroskopiska hårliknande strukturer mellan linserna som hjälper till att förhindra att droppar kondenserar på ytan, liknande de självrenande hår som omger riktiga insektögon.
Se rörelse och känna luften i realtid
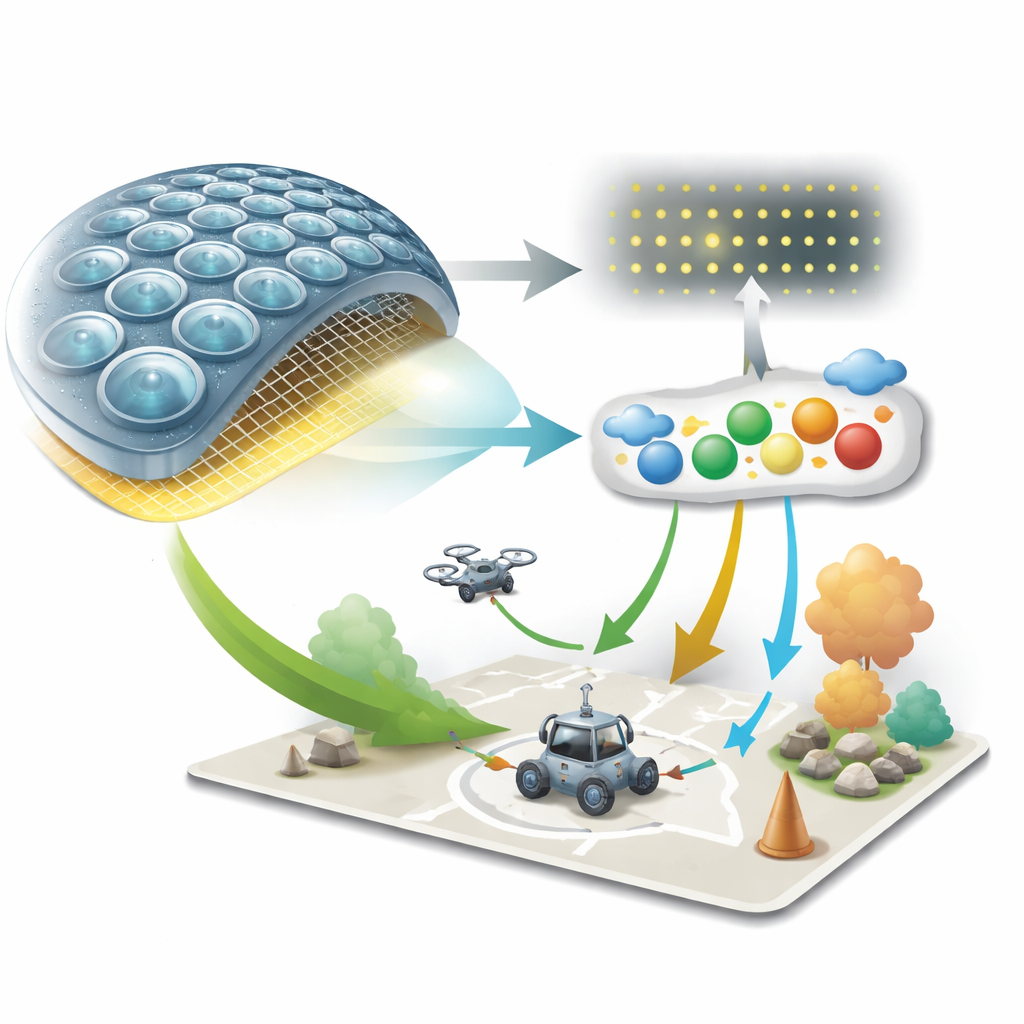
Under linserna ligger ett specialkonstruerat ljuskänsligt lager gjort av en blandning av organiska halvledare och blysvavelskvantprickar. Denna kombination gör att enheten kan detektera ljus från ultraviolett genom synligt till nära-infrarött spektrum samtidigt som den reagerar på ungefär en tiotusendels sekund — tillräckligt snabbt för en flimmerfusionshastighet på cirka 1 000 bilder per sekund. Istället för att skapa skarpa, detaljerade bilder registrerar enheten föränderliga ljusa fläckar över sitt vida synfält, vilket en enkel matematisk modell omvandlar till information om var objekt är, hur långt bort de kan vara och hur de rör sig. Parallellt fungerar en bläckstråleprintad kolorimetrisk matris som en artificiell näsa: små fläckar innehållande metallkomplex och pH-känsliga färgämnen ändrar färg vid exponering för specifika farliga gaser. En lättviktsalgoritm inspirerad av flugor omvandlar sedan dessa färgförändringar till gasidentitet och ungefärlig koncentration, med cirka 93 % noggrannhet över tio vanliga giftiga ångor.
Från labb-bänk till rullande robotar och drönare
För att bevisa att detta insektsskala “öga-och-näsa” är användbart utanför labbet monterade forskarna det på två små obemannade plattformar. På en omnidirektionell hjulrobot tillät det krökta ögat systemet att övervaka ett 180-graders horisontellt fält och upptäcka rörelse tillräckligt snabbt för att undvika inkommande hinder, även i dimmiga förhållanden. Enkla, hårdvaruimplementerade regler — återigen inspirerade av insektens flyktbeteende — lät roboten backa från inkommande objekt eller styra runt dem medan den körde. På en liten drönare spårade samma enhet positionen för rörliga ljuskällor i tre dimensioner och, tillsammans med gassensorn, guidade autonom utforskning genom en testmiljö innehållande ljuskällor och plymer av farliga kemikalier. Visuell och luktinformation kombinerades så att drönaren både kunde följa mål och kartlägga farliga gaser i rummet.
Varför detta spelar roll för framtida små maskiner
Detta arbete visar att det är möjligt att packa både vidvinkel-, höghastighetsvision och kemisk sensning i en sensor ungefär lika stor som ett riktigt insektöga. Enheten offrar fin bilddetalj till förmån för rörelsekänslighet, brett spektralt omfång och energieffektivitet — exakt de avvägningar som är viktiga för små drönare och robotar med begränsad kraft och beräkningsresurser. Genom att förena “ögon” och “näsa” i ett kompakt system och låna sammanslagningsstrategier från insektshjärnor pekar studien mot framtida svärmar av små, lågkostnadsautonoma maskiner som kan undvika hinder, känna igen riskfyllda gaser och utforska komplexa miljöer med samma smidighet som flygande insekter.
Citering: Wang, J., Wei, S., Qin, N. et al. An insect-scale artificial visual-olfactory bionic compound eye. Nat Commun 17, 2259 (2026). https://doi.org/10.1038/s41467-026-68940-0
Nyckelord: bioniskt sammansatt öga, bioinspirerad robotik, multimodal sensning, mikrovisionssystem, detektion av farliga gaser