Clear Sky Science · sv
Robotiska hopp förbättrade av dragkraftsinducerad hypogravitation, uppnår precisa, förutsägbara och förlängda hopp
Robotar som kan hoppa som om de var på månen
Föreställ dig en räddningsrobot som kan hoppa över murar, kasta sig över bäckar eller dyka genom ett rörligt fönster utan att missa landningsplatsen med mer än en centimeter. Denna artikel beskriver en ny typ av hoppande maskin som gör just det genom att kortvarigt ge sig själv ”låg gravitation”, ungefär som att befinna sig på månen eller Pluto, samtidigt som den håller sina hopp precisa och förutsägbara.
Varför hoppande robotar har problem idag
Djur som torghoppor eller grodor kan hoppa långt, landa på smala percher och korrigera sig i luften när något förändras. De flesta robotar kan inte det. Traditionella hoppande robotar möter ett kompromiss: de kan antingen hoppa mycket långt med starka fjädrar eller motorer, eller landa precist och säkert, men sällan båda. Fjäderladdade ”katapult”-designer lagrar mycket energi men är långsamma att ladda om och svåra att styra när de väl är i luften. Direkt drivna motorben är lättare att kontrollera men saknar den kraftiga stöt som krävs för mycket höga hopp. Tillägg som vingar eller rotorer kan förlänga flygtiden, men de gör ofta flygbanan rörig och oförutsägbar, vilket är ett problem om du måste träffa ett litet mål eller undvika rörliga hinder.
Att simulera låg gravitation med luftdrag
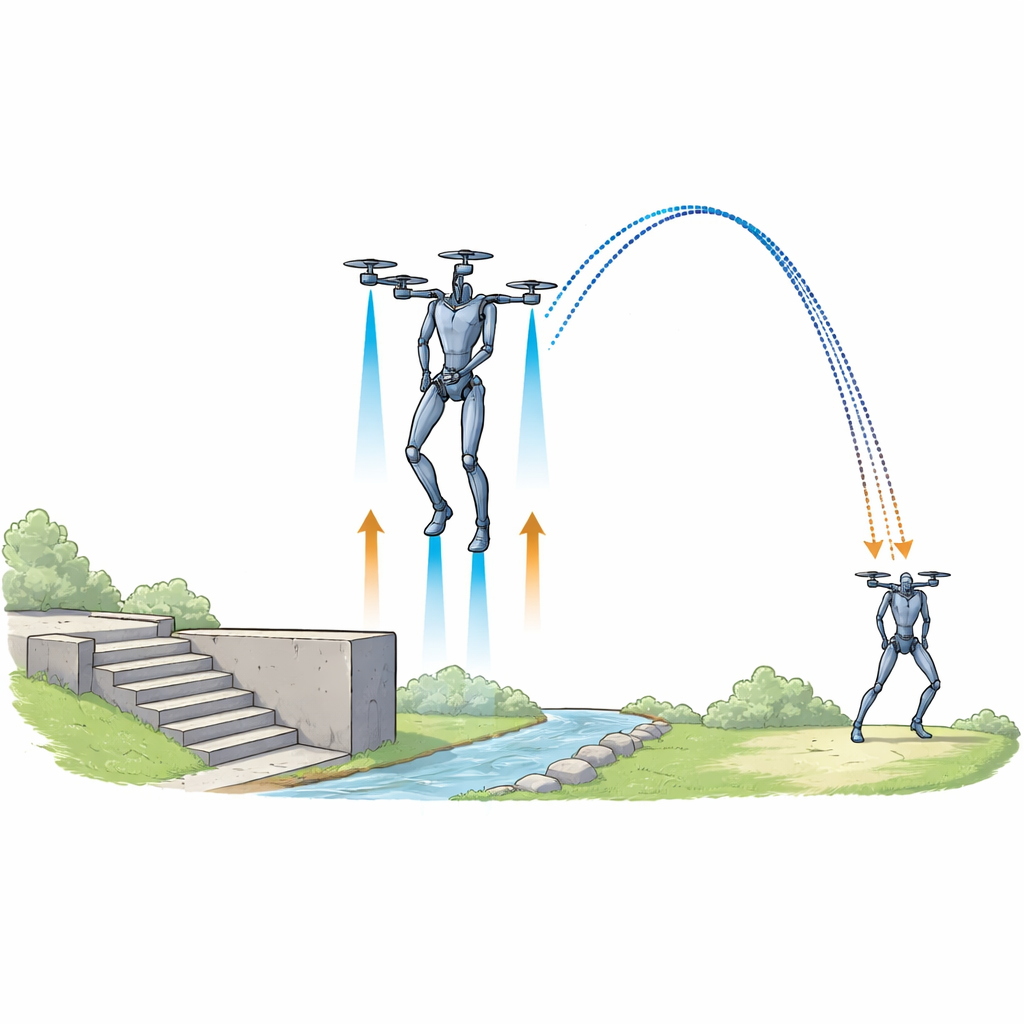
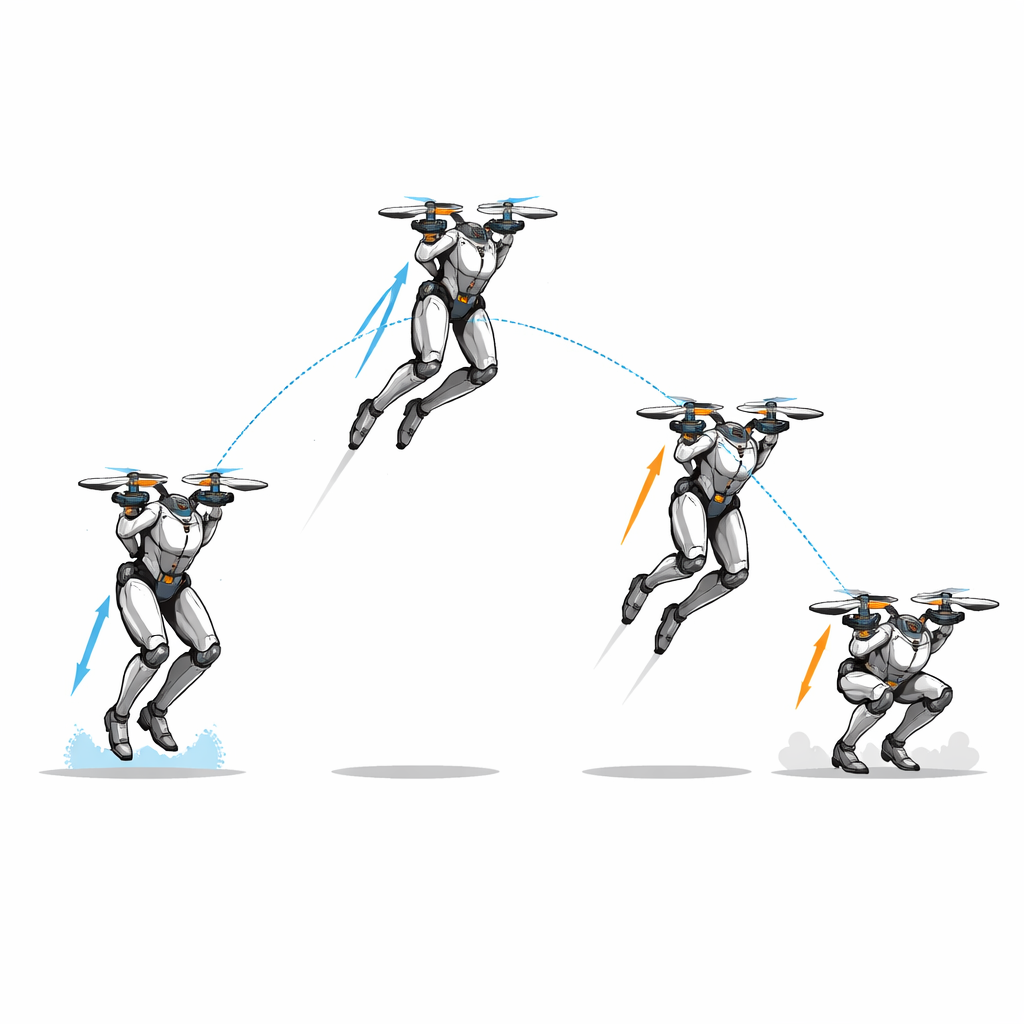
Forskarna byggde en 370-gram bipedal robot kallad GravOff som kringgår denna kompromiss genom att skapa sin egen låggravitationsmiljö. Roboten har ett par långa, insektliknande ben drivna direkt av motorer, samt fyra små propellrar monterade på en bred ram. Under ett hopp ger benen en snabb stötkraft från marken för att nå hög avkastningshastighet. Samtidigt trycker propellrarna uppåt precis tillräckligt för att delvis kompensera jordens gravitation, ett tillstånd författarna kallar dragkraftsinducerad hypogravitation. Eftersom den ”effektiva gravitationen” är lägre skickar samma benkraft roboten längs en mycket högre och längre båge — upp till 6,9 meter i höjd, ungefär 46 gånger dess kroppshöjd — jämförbart med de bästa rekordhållande hoppmaskinerna men med mjukare upp- och nedstigningshastigheter.
Rita och styra den perfekta bågen
Det som gör GravOff särskilt ovanlig är inte bara hur långt den hoppar, utan hur precist den följer en vald bana. Teamet behandlar varje hopp som en tidsstämplad båge, där position och tid är låsta tillsammans som punkter på en ritad parabel. Med sensorer och en prediktiv styralgoritm jämför roboten sin faktiska rörelse i luften med denna referenskurva dussintals gånger per sekund och lutar försiktigt sina rotorer för att knuffa sig tillbaka på kurs. Avgörande är att propellrarna kan svänga oberoende av robotens kroppsbankning, så roboten kan rikta sitt drag utan att behöva luta hela ramen, vilket håller balans och styrning separata. Denna dubbla kontroll låter GravOff landa inom en kvadrat på bara 25 centimeter per sida med millimeternivåns repeterbarhet, även när avfyrningsvinkeln är fel med så mycket som 15 grader eller när en stark fläkt blåser med 3,5 meter per sekund under flygningen.
Mjuka, stabila landningar utan studs
Höga hopp innebär vanligtvis hårda landningar, vilket kan skada hårdvara eller få en robot att välta. GravOff hanterar detta med två landningslägen. För särskilt hårda stötar hjälper en mjuk 3D-utskriven stötdämpare i varje ben att absorbera energi. För precisa landningar på små eller rörliga mål drar roboten aktivt in sina ben och sträcker sedan ut dem igen i precis rätt ögonblick, vilket förlänger kontakttiden med marken. Denna ”aktiva dämpning” minskar påverkningskrafterna med en faktor fyra jämfört med passiv landning och nästan upphäver den inkommande rörelsemängden, så roboten stannar vid sin första fotisättning istället för att studsa bort.
Från laboratoriehopp till verkliga uppdrag
Bortom kontrollerade inomhustester visar författarna att GravOff kan kombinera hopp med krypning och rullning för att klara verklig terräng. Den kan krypa långsamt över gräs, sand, kullersten och räfflad asfalt för att ställa in en säker avfyrningsposition, och sedan använda hypogravitetssteg för att ta sig över hinder som trappsteg, en 2,35 meter hög mur eller en tre meter bred bäck. Den låggravitativa hoppstrategin visar sig också vara avsevärt mer energieffektiv än ren flygning för att rensa medelstora hinder: i vissa tester använde hoppen mindre än en tiondel av den totala energi som krävdes för att hovra eller flyga över samma barriär.
Vad detta betyder för framtidens robotar
Enkelt uttryckt visar detta arbete att robotar kan hoppa längre, mer exakt och säkrare genom att låtsas att gravitationen är svagare och genom att justera sin flygbana efter avstamp. GravOffs design antyder framtida utforskare som skulle kunna hoppa över rasmassor vid katastrofinsatser eller korsa klippor och kratrar på andra planeter, samtidigt som de exakt kan förutse var och när de kommer att landa. Samma idéer — att motverka gravitation med dragkraft och styra bågen under flykten — kan läggas till många andra hoppande robotar, vilket potentiellt förvandlar hoppande till ett tillförlitligt, planerat färdsätt snarare än en riskfylld sista utväg.
Citering: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
Nyckelord: hoppande robotar, hypogravitation, dragkraftsvektorer, benbaserad lokomotion, trajektoriestyrning