Clear Sky Science · sv
Bioinspirerad spikande arkitektur möjliggör beröringskodning med energibegränsningar
Varför smartare känsel är viktigt för robotar
Våra fingertoppar låter oss känna ett sandkorn, ett glas som glider eller en lätt knackning på en bråkdels sekund, allt medan de använder förvånansvärt lite energi. När robotar flyttar ut från fabriker och in i hem, sjukhus och trånga arbetsmiljöer behöver de en liknande känsel för att interagera säkert med människor och ömtåliga föremål. Denna studie presenterar en ny konstgjord hud och en hjärninspirerad bearbetningsmetod som gör det möjligt för maskiner att upptäcka var de berörs med hög precision, samtidigt som energianvändningen hålls extremt låg — ett nyckelkrav för framtida mobila och samverkande robotar.
En flexibel hud som känns som vår
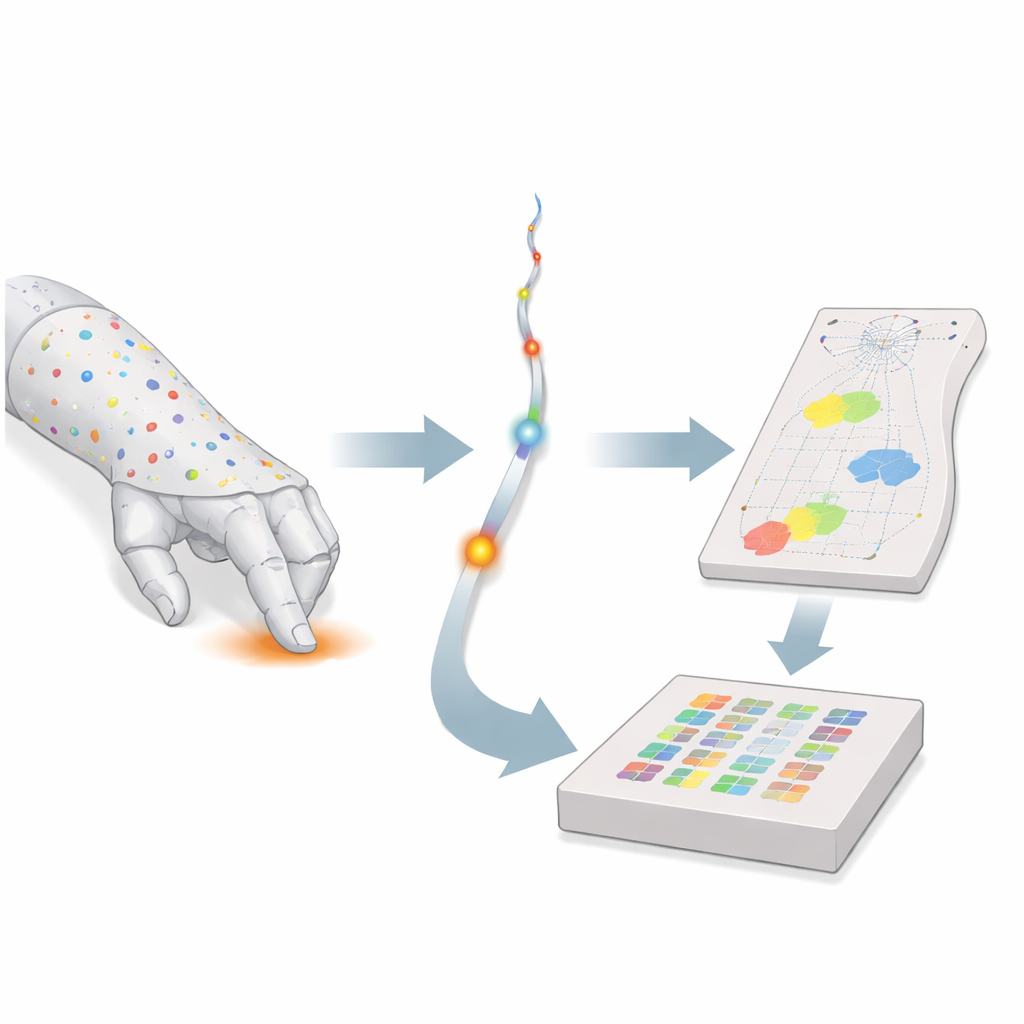
Forskarna byggde en mjuk, silikonbaserad “e-hud” formad som en mänsklig underarm och försåg den med 21 små optiska sensorer längs en enda hårfin fiber. Dessa sensorer, kallade Fiber Bragg Gratings, reagerar på töjning och böjning av huden genom att skifta färgen på det ljus som reflekteras i fibern. Eftersom fibern slingrar sig under ytan är varje sensor känslig inte bara för en enda punkt utan för en liten region, mycket likt hur verkliga känselreceptorer är fördelade i vår hud. Några av dessa artificiella receptorer reagerar starkt på mycket lokal tryckning, medan andra svarar mer brett på deformationer, vilket speglar hur olika nervändar i mänsklig hud fångar både fina detaljer och den övergripande formen.
Att omvandla beröring till elektriska spikar
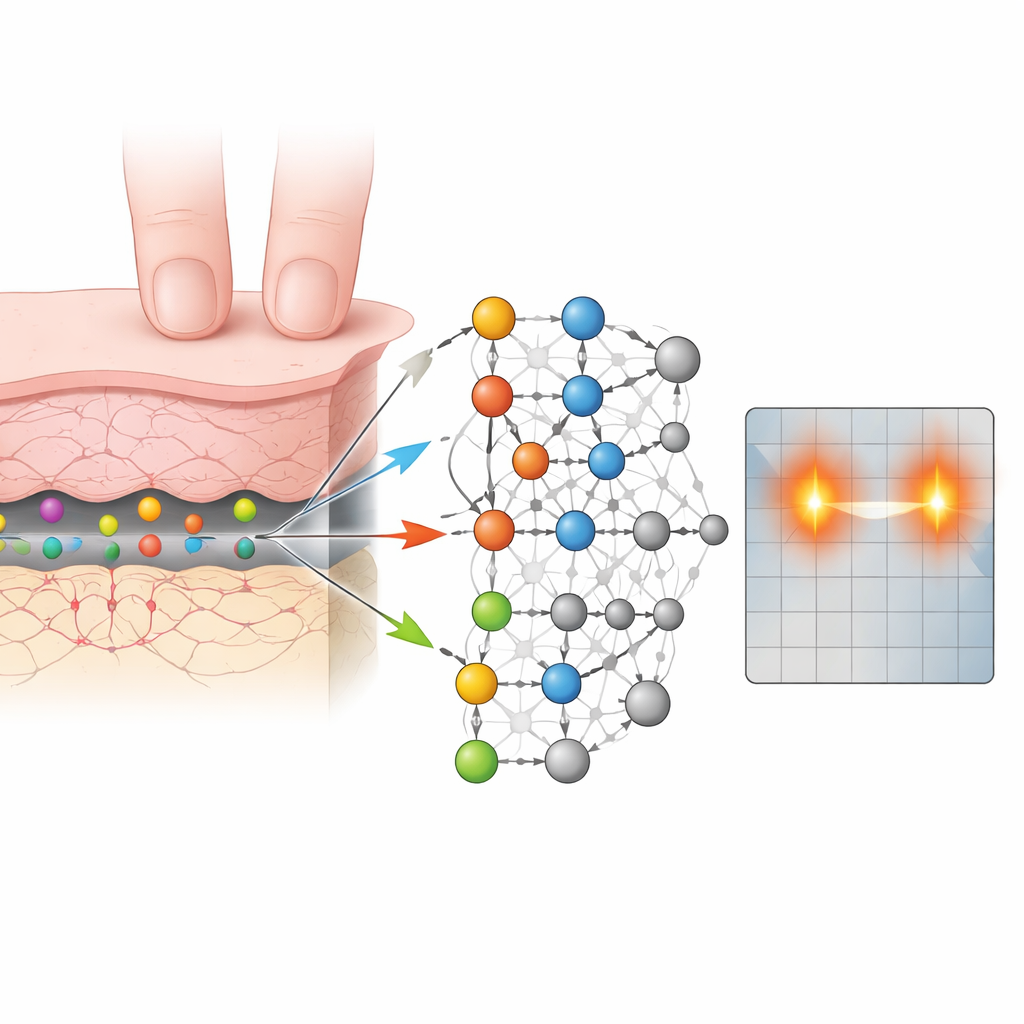
För att tolka detta rika flöde av data förlitade sig teamet inte på konventionella djupa inlärningsmodeller som bearbetar ramar av talvärden. Istället efterliknade de biologin närmare genom att använda ett spikande neuralt nätverk, där information färdas som korta elektriska pulser, eller ”spikar”, liknande nervimpulser. De optiska signalerna från e-huden omvandlas till strömmar av spikar och skickas in i nätverket. Varje utgångsneuron i detta nät representerar en specifik punkt på huden och bildar en tvådimensionell intern karta över ytan. När något berör e-huden spikar en kluster av neuroner i ett mönster som avslöjar var kontakten inträffade, och systemet beräknar beröringspunkten från centrum i denna aktivitet.
Skarpare känsel med färre resurser
Med denna design lokaliserar systemet enstaka tryckpunkter på den konstgjorda underarmen med ett typiskt fel på cirka tre millimeter, vilket överträffar en stark deep learning-baslinje med ungefär en tredjedel och uppnår ungefär tio gånger bättre rumslig upplösning än vad sensoravståndet ensamt skulle förväntas ge. Det fungerar också när flera punkter trycks samtidigt — upp till fyra samtidiga kontakter — och när tryck appliceras manuellt med varierande kraft och riktning. Forskarna undersökte olika interna kopplingsmönster i nätverket och fann att en layout inspirerad av tidiga beröringsbanor i ryggmärgen — där excitatoriska celler matar in i inhibitoriska interneuroner som undertrycker närliggande utgångar — är avgörande för att skärpa rumsliga detaljer. Denna ”laterala inhibering” hjälper till att hålla representationen skarp och förhindrar oskärpa när kontakter ligger nära varandra.
Byggd för låg energi, inte bara noggrannhet
Ett centralt mål med arbetet är att hålla energiförbrukningen i schack, en fråga som blir kritisk om en hel robotkropp ska täckas av sensorer. Teamet tränade nätverket under ökande press att avge färre spikar, vilket efterliknar evolutionens behov av att byta bort rå prestanda mot metaboliska kostnader. Under okonstlade förhållanden presterade en mer flexibel, mindre biologiskt realistisk arkitektur något bättre. Men när spikaktiviteten reducerades till energieffektiva nivåer vann den bioinspirerade designen faktiskt, och gav högre noggrannhet för samma aktivitetsbudget. Forskarna portade sedan detta nätverk till en mixed-signal neuromorfisk krets som implementerar neuroner och synapser direkt i analog elektronik. På denna hårdvara körde det taktila systemet på sub-milliwatt-effekt under beröring och endast några mikrowatt i viloläge, samtidigt som precisionen endast minskade marginellt.
Från laboratorieunderarmar till framtida robotkroppar
Sammanfattningsvis visar detta arbete att en väl avvägd kombination av mjuk, distribuerad sensning och hjärnliknande spikande beräkning kan ge maskiner en precis och snabb känsel utan hög energikostnad. Genom att matcha inte bara prestanda utan också kopplingsprinciperna hos tidiga beröringsbanor i nervsystemet antyder systemet varför evolutionen kan ha favoriserat vissa kretsmotiv: de levererar tillräckligt god noggrannhet under strikta energigränser. I större skala skulle liknande e-hudar och neuromorfiska processorer kunna göra det möjligt för robotar och proteser att känna kontakt över sina ytor, reagera snabbt på oväntade stötar och interagera säkrare och mer naturligt i de komplexa, dynamiska miljöer där människor lever och arbetar.
Citering: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
Nyckelord: konstgjord hud, taktil sensing, spikande neurala nätverk, neuromorf hårdvara, robotsäkerhet