Clear Sky Science · sv
En parallellbent insektsstor robot baserad på ett aktiverings‑ och strukturintegrerat origamimekanism
Små robotar för trånga utrymmen
Föreställ dig en räddningsrobot så liten och lätt att den kan glida genom en sprucken vägg, krypa längs ett smalt rör eller till och med simma över en vattenpöl. Denna artikel presenterar just en sådan maskin: en handflatesstor, insektsliknande robot kallad PLioBot som är framställd från ett enda vikt ark, rör sig mycket snabbt för sin storlek och hanterar många typer av ojämn terräng. Forskarna visar hur smart vikning kombinerad med små vibrationsmotorer kan förvandla plana material till rörliga utforskare för trånga, svåråtkomliga platser.
Från platt ark till fyrbent krypare
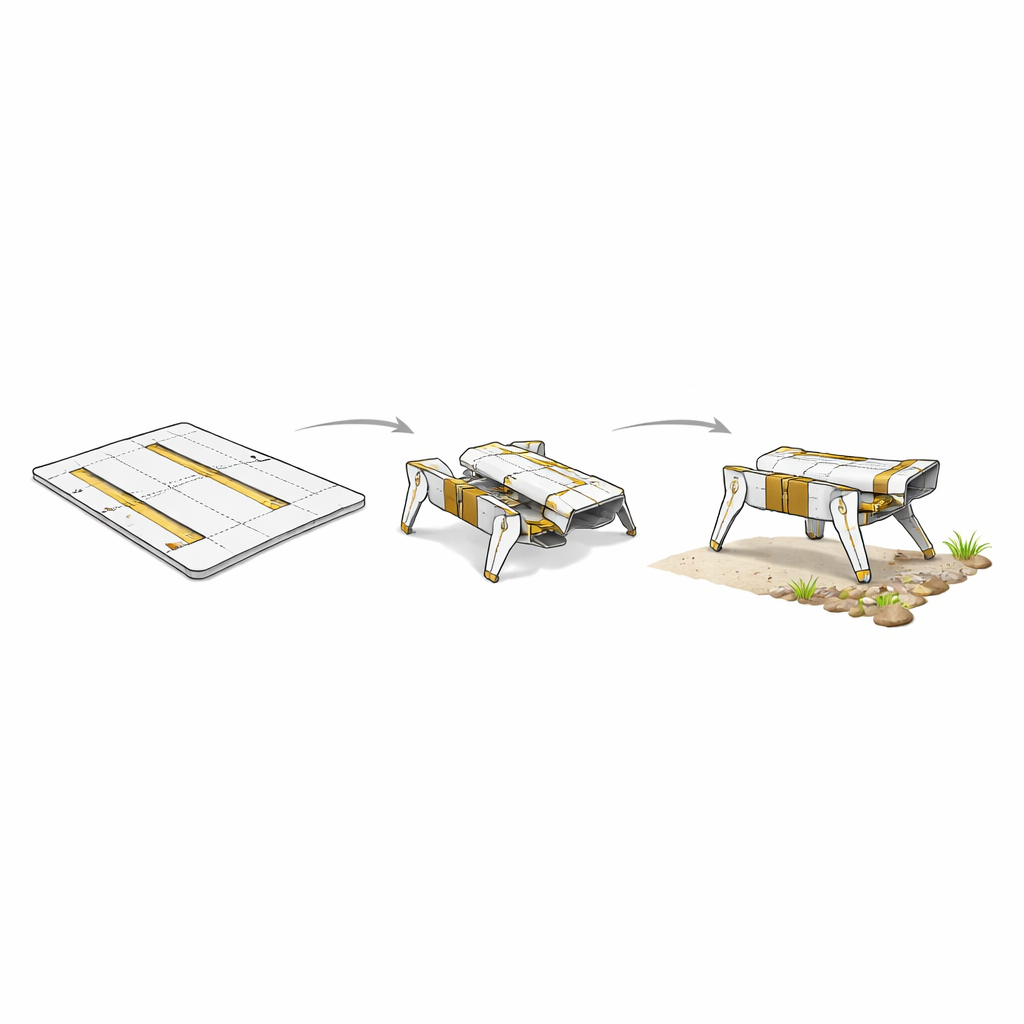
PLioBot börjar som ett platt mönster, ungefär som en vik‑och‑klipp pappersleksak. Istället för papper är mönstret en femlagerssmörgås av glasfiber, kolfiber, en flexibel plastfilm och remsor av piezoelektriskt keramik som fungerar som muskler. Precis placerade tunna områden i plastlagret fungerar som gångjärn. Efter laserskärning viks hela strukturen i en koreograferad sekvens så att kroppen, de fyra benen och alla åtta ställdon framträder ur ett kontinuerligt stycke. Inga skruvar, inga separata motorer och ingen manuell inpassning behövs—enbart vikning ger en komplett robot på cirka 2,5 centimeter och med en vikt på bara 1,2 gram.
Hur de små benen tar stora kliv
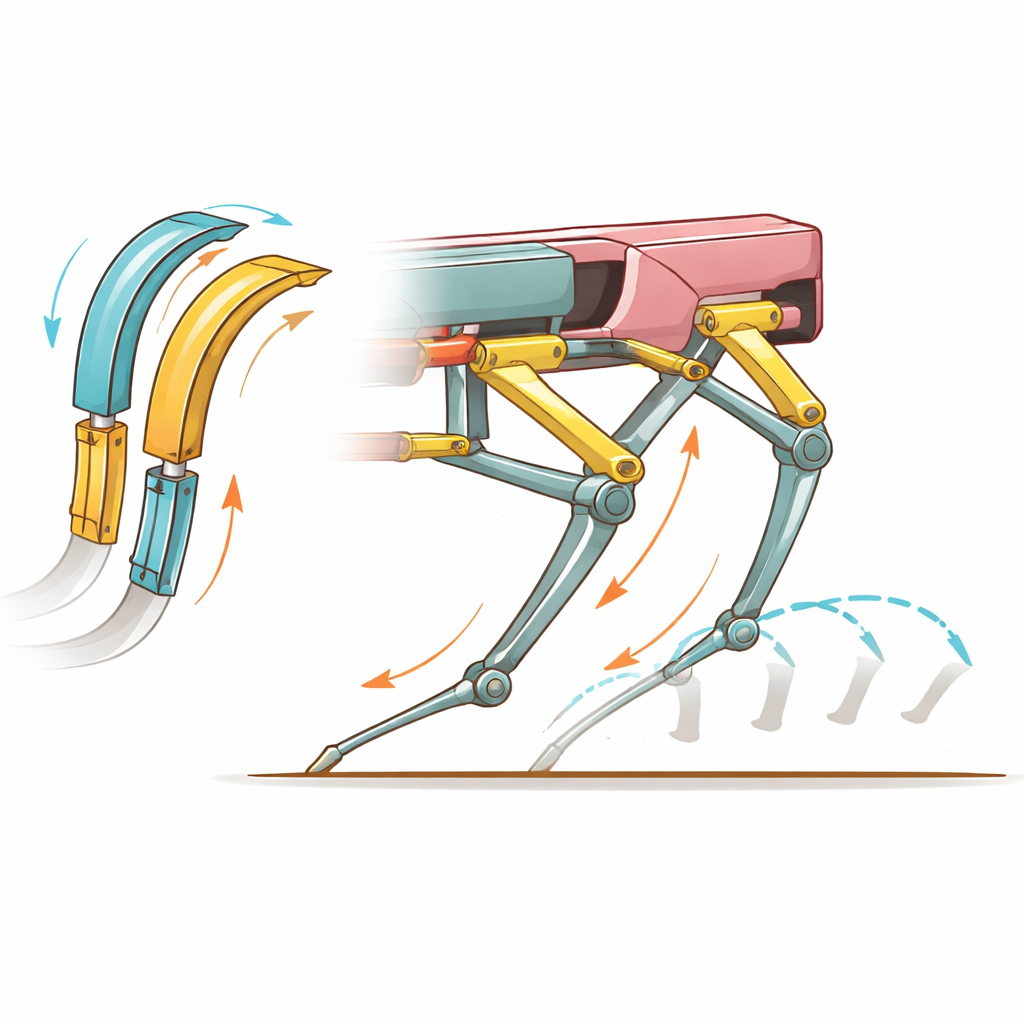
Robotens rörelse kommer från piezoelektrisk keramik—material som böjer sig något när en elektrisk spänning appliceras. Varje sida av PLioBot bär ett par "tvilling" remställdon. När alternerande spänningar får dessa remsor att böja sig fram och tillbaka förs deras rörelse genom ett set av gångjärnsförbundna länkar som fungerar som en miniatyr parallellbenmekanism. Genom att tajma signalerna noggrant kan varje ben röra sig upp och ner såväl som fram och tillbaka och spåra en loopande bana med sin fot. Genom att koordinera alla fyra benen i ett trotliknande mönster kan roboten trycka effektivt mot underlaget och skjuta framåt. Vid optimala inställningar når PLioBot 44,6 centimeter per sekund—ungefär 18 kroppslängder per sekund—vilket gör den till en av de snabbaste benburna robotarna i denna skala.
Inbyggda muskler, färre monteringsbekymmer
De flesta insektsstora robotar monteras noggrant av många små delar: separata motorer eller ställdon, ramar och länkar som alla måste justeras för hand. Det ökar kostnaden, begränsar precisionen och gör massproduktion svår. Författarna angriper detta genom att fullt ut integrera struktur och aktivering i en enda "origamimekanism." De använder en förfinad lamineringsteknik där alla lager—styva glasfiberskikt, ortogonala kolfiberledare, den flexibla gångjärnsfilmen och keramiska remsor—skärs, staplas, inpassas med stift‑hål och pressas ihop under värme innan den slutliga konturen frigörs med laser. Resultatet är ett robust platt blank som redan innehåller robotens skelett, leder och muskler i sina slutliga positioner, redo att vikas till form.
Går, klättrar och simmar i verklig terräng
För att testa om deras design är användbar utanför laboratoriebänken pressade teamet PLioBot genom en rad vardagliga hinder. På slät glasriskerar den att slira, men den rör sig ändå snabbt; på svamp och akryl får den bättre grepp på bekostnad av lite hastighet. Den klättrar ramper upp till 12 grader och kan bära laster tyngre än sig själv—upp till 1,7 gram, med särskilt god prestanda under cirka 0,8 gram. I trånga tunnlar bara 3 centimeter breda och under 3 centimeter höga bär roboten en last på 1,4 gram samtidigt som den håller flera kroppslängder per sekund. Genom att byta till halvsfäriska fotkuddar eller fenliknande paddlar korsar PLioBot grus och gräs, tar sig över rörlig sand utan att sjunka, går längs botten av en tank och simmar till och med på vattenytan med enbart sina simfötter som drivkraft.
Vad detta betyder för framtidens små underrättelsevarelser
Enkelt uttryckt visar detta arbete att man kan trycka ut och vika en mycket liten robot vars kropp och muskler är ett enda stycke, och att denna robot kan röra sig snabbt och hantera många röriga, verkliga ytor. PLioBot är fortfarande beroende av externa strömkablar, så den är inte ännu helt självständig. Men den integrerade origamidesignen och tillverkningsmetoden pekar mot en framtid där stora antal billiga, insektsstora robotar kan produceras som plana delar, vikas till form och utrustas med miniatyrbatterier och styrkretsar. Sådana svärmar skulle en dag kunna spana i skadade byggnader, inspektera industriella rörledningar eller utforska andra planeter—allting med utgångspunkt i något som vid första anblick ser ut som ett smart utskuret ark.
Citering: Zhu, Q., Jiang, T., Luo, Z. et al. A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism. Microsyst Nanoeng 12, 92 (2026). https://doi.org/10.1038/s41378-026-01205-4
Nyckelord: insektsstora robotar, origamirobotik, piezoelektriska ställdon, terränganpassad locomotion, mikrorobotfabrication