Clear Sky Science · sv
Trådformade formminneslegeringsaktuatorer: modellering, konstruktion och styrning
Metalltrådar som "kommer ihåg" sin form
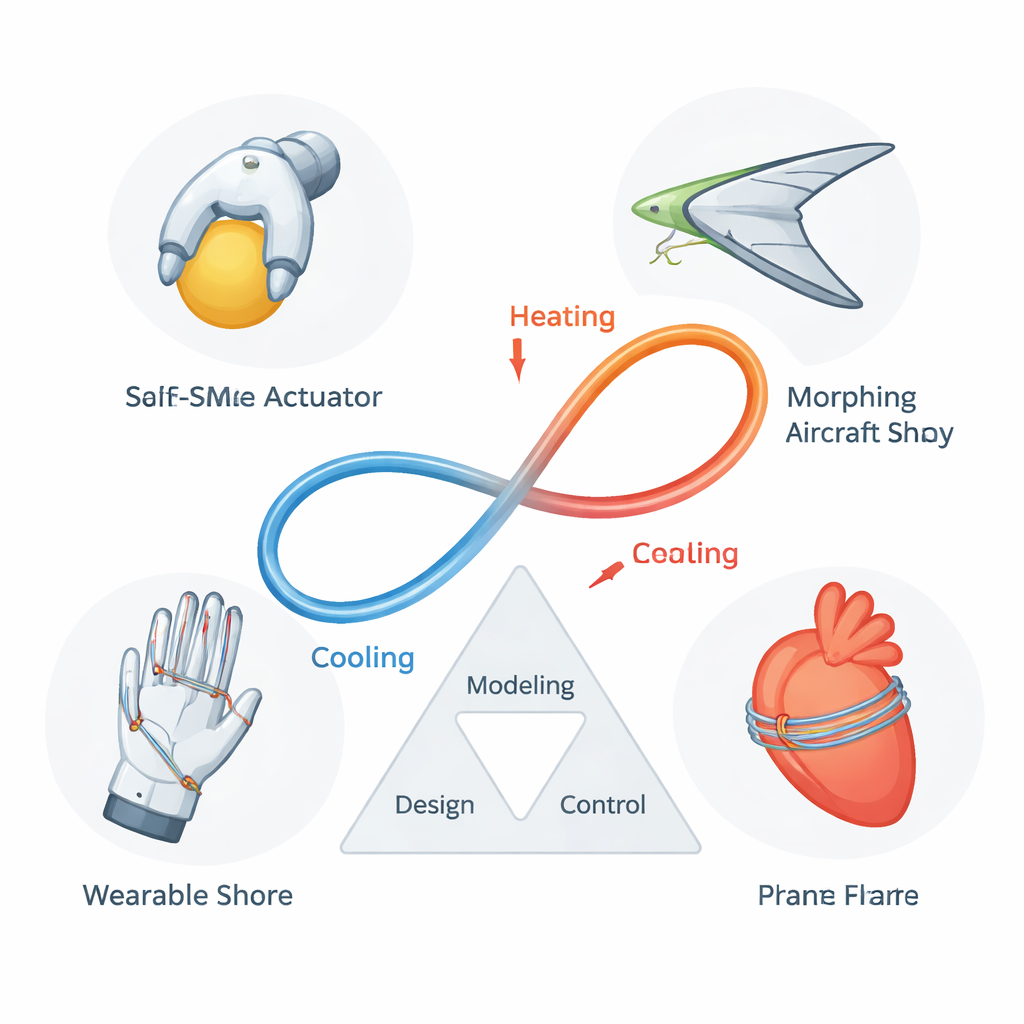
Föreställ dig en tunn metalltråd som kan dra som en muskel, föra en robots finger att böja sig tyst, omforma en flygplansvinge under flygning eller varsamt klämma om ett sviktande hjärta – allt genom att bara värma upp och kyla ner den. Denna översiktsartikel granskar sådana trådar, gjorda av formminneslegeringar (FML), och förklarar hur de fungerar, hur ingenjörer konstruerar och styr dem samt var de redan används i praktiken inom robotik, flyg, medicinteknik och bärbar teknik.
Hur smarta metalltrådar blir levande
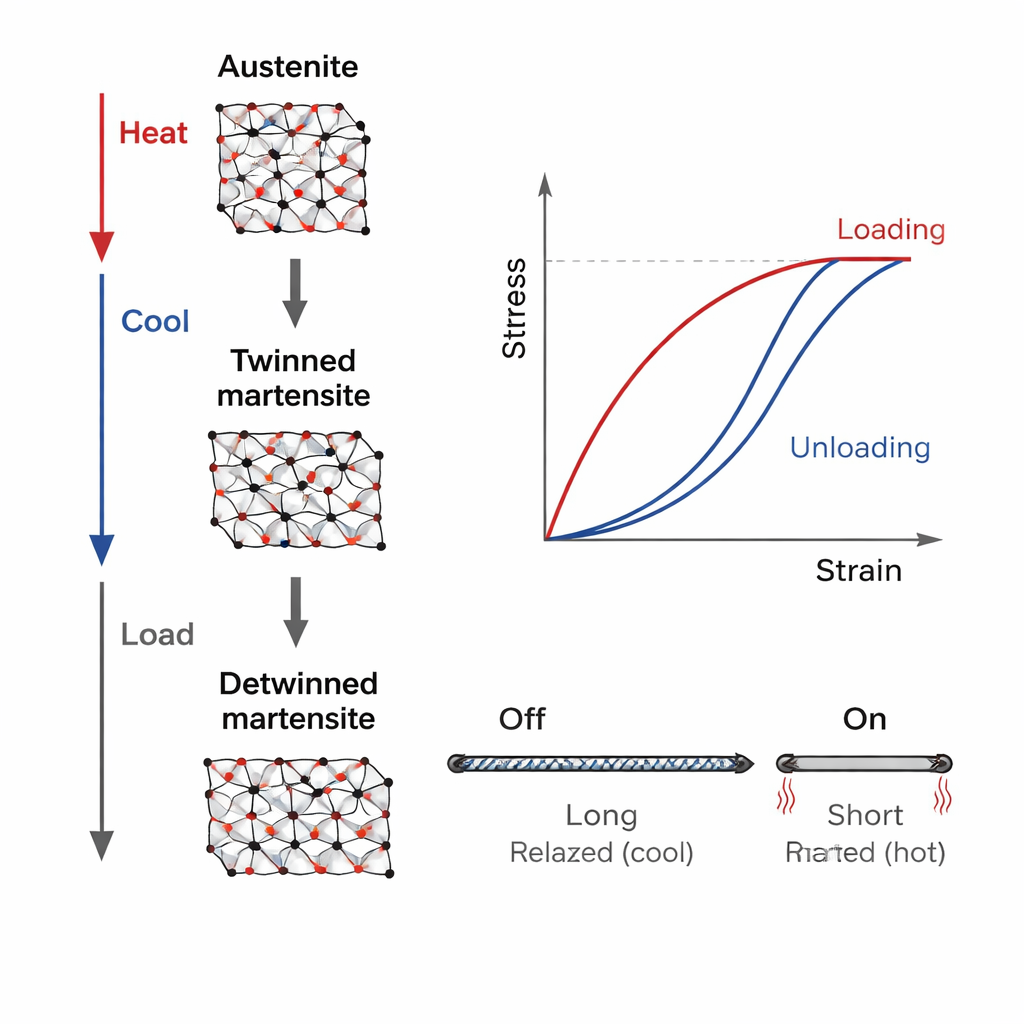
Formminneslegeringar är speciella metaller som kan deformeras för att sedan återgå till en förinställd form när temperaturen ändras. I ett läge, kallat formminneseffekten, kan du böja tråden när den är kall och relativt mjuk; när den värms upp återtar den sin ursprungliga form. I ett annat läge, superelastiskitet, kan legeringen sträckas under belastning för att sedan fjädra tillbaka när belastningen tas bort. Inuti metallen härrör detta beteende från fast–fast fasövergångar mellan olika kristallstrukturer, vilket gör dess respons starkt icke-linjär och något svår att förutsäga. Eftersom FML-trådar är tunna kan ingenjörer vanligtvis behandla dem som endimensionella element, vilket förenklar de matematiska modeller som beskriver hur temperatur, spänning, töjning och elektrisk ström hänger ihop.
Från ekvationer till datadrivna modeller
För att använda dessa smarta trådar pålitligt behöver konstruktörer modeller som förutser hur hårt de kan dra, hur långt de rör sig, hur varma de blir och hur deras elektriska resistans förändras. Klassiska ”konstitutiva” modeller behandlar tråden som ett bulkmaterial och spårar hur dess interna faser förändras med spänning och temperatur. Dessa modeller är effektiva men förlitar sig på förenklande antaganden. Parallellt använder forskare i högre utsträckning maskininlärning och neurala nätverk för att lära sig trådens beteende direkt från experimentdata, vilket fångar subtil hysteres och historieseffekter. En annan viktig inriktning undersöker hur trådens elektriska resistans och temperatur utvecklas vid strömdriven uppvärmning, vilket möjliggör självdetektering – förmågan att uppskatta kraft eller rörelse enbart genom att mäta resistans istället för att lägga till separata sensorer.
Bygga rörelse: enkla belastningar, mjuka strukturer och artificiella muskler
På hårdvarusidan organiserar artikeln trådbaserade FML-aktuatorer efter hur de belastas. I de enklaste ”linjära belastnings”-uppläggen drar en tråd mot en fjäder eller vikt för att driva gripdon eller rymdförsläppsmekanismer. Mer avancerade ”icke-linjära belastnings”-system inbäddar trådar i flexibla balkar, mjuka polymerer, textilier eller origamiliknande strukturer för att åstadkomma stora böjrörelser, krypande robotar och vävda exoskelettshandskar. Differentialkonfigurationer använder två eller fler motverkande trådar, efterliknande muskler i par som biceps och triceps, för att ge snabba, reversibla rörelser i leder som konstgjorda armbågar och vrister. Eftersom en FML-tråd endast kan förkortas med ungefär 8 % är ett viktigt konstruktionstema slagförstärkning: att linda långa trådar runt remskivor, arrangera dem i kurvade banor, använda modulära glid- eller roterande stadier eller anta FML-fjädrar för att uppnå större rörelser på begränsade ytor.
Lära smarta trådar att lyda
Att styra dessa aktuatorer är utmanande eftersom deras respons beror både på temperatur och mekanisk historia. Artikeln sammanfattar ett spektrum av styrstrategier, från klassiska PID-regulatorer till mer sofistikerade system. Modellbaserade tillvägagångssätt använder fysikbaserade ekvationer eller hysteresmodeller för att utforma sliding-mode-regulatorer och framåtriktade kompensatorer som motverkar icke-linjäritet. Neurala nätverks- och reinforcement-learning-regulatorer går längre och lär sig hur tråden ska drivas för att uppnå exakt rörelse utan att vara beroende av perfekta modeller. Samtidigt använder självdetekterande styrmetoder trådens förändrade resistans som inbyggd återkopplingssignal, ibland i kombination med neurala nätverk, för att uppskatta position eller kraft utan stora externa sensorer.
Verkliga användningsområden och framtida riktningar
Trådformade FML-aktuatorer driver redan mjuka robotgripdon, små krypande robotar, morfande flygplansvingar, satellitfrigöringsanordningar, implanterbara pumpar och stentar, hjälpande hjärtomslag, kompressionsplagg, exoskelettdräkter och rehabiliteringshandskar. I alla dessa fält kvarstår gemensamma hinder: långsam kylning och värmeuppbyggnad, utmattning över många cykler, komplexitet i styrningen och tillverkningskostnader. Författarna menar att framsteg kommer att bero på integration av tre trådar: bättre multiskaliga och dataförstärkta modeller, smartare strukturella designer som kombinerar FML med flexibel elektronik och multifunktionella material, samt intelligenta styrstrategier som anpassar sig online. De föreställer sig enhetliga ”modellering–konstruktion–styrning”-ramverk, stödda av digitala tvillingar och maskininlärning, som kan samoptimera dessa aspekter tillsammans. För en lekman är budskapet att dessa formskiftande trådar mognar från labbcuriositeter till praktiska artificiella muskler, med potential att tyst omforma maskiner, medicintekniska produkter och bärbara system under de kommande åren.
Citering: Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
Nyckelord: formminneslegering, mjuk robotik, intelligenta aktuatorer, morfande strukturer, bärbar teknik