Clear Sky Science · ru
Вероятностное картографирование заполненности, вдохновлённое мозгом, с использованием векторных символьных архитектур
Роботы, которые видят мир как лоскутное покрывало
Каждому автономному автомобилю, складскому роботу или домашнему пылесосу нужна быстрая мысленная карта окружения: что твёрдое, что пусто, а что ещё неизвестно. В этой статье предложен новый способ построения такой карты — называемой картой заполненности — заимствующий идеи того, как мозг может представлять информацию, с целью сохранить точность карт, одновременно существенно ускорив и сделав более экономичным процесс вычислений.
Превращение сырых сигналов датчиков в карту мира
Роботы часто используют лазерные сканеры или другие датчики расстояния, чтобы исследовать мир по ходу движения, собирая облака точек о том, где находятся объекты и где пространство свободно. Классическая техника — картирование заполненности — делит окружение на крошечные ячейки, как пиксели на экране, и присваивает каждой вероятность быть занятой. Традиционные методы рассматривают это как тяжёлую статистическую задачу, тщательно учитывая неопределённость, но требуя много времени и памяти. Новые нейросетевые подходы работают быстрее и могут заполнять пробелы, но они ведут себя как «чёрные ящики», их трудно доверять в критичных с точки зрения безопасности приложениях, и обычно их приходится дообучать для каждой новой среды.
Средний путь, вдохновлённый мозгом
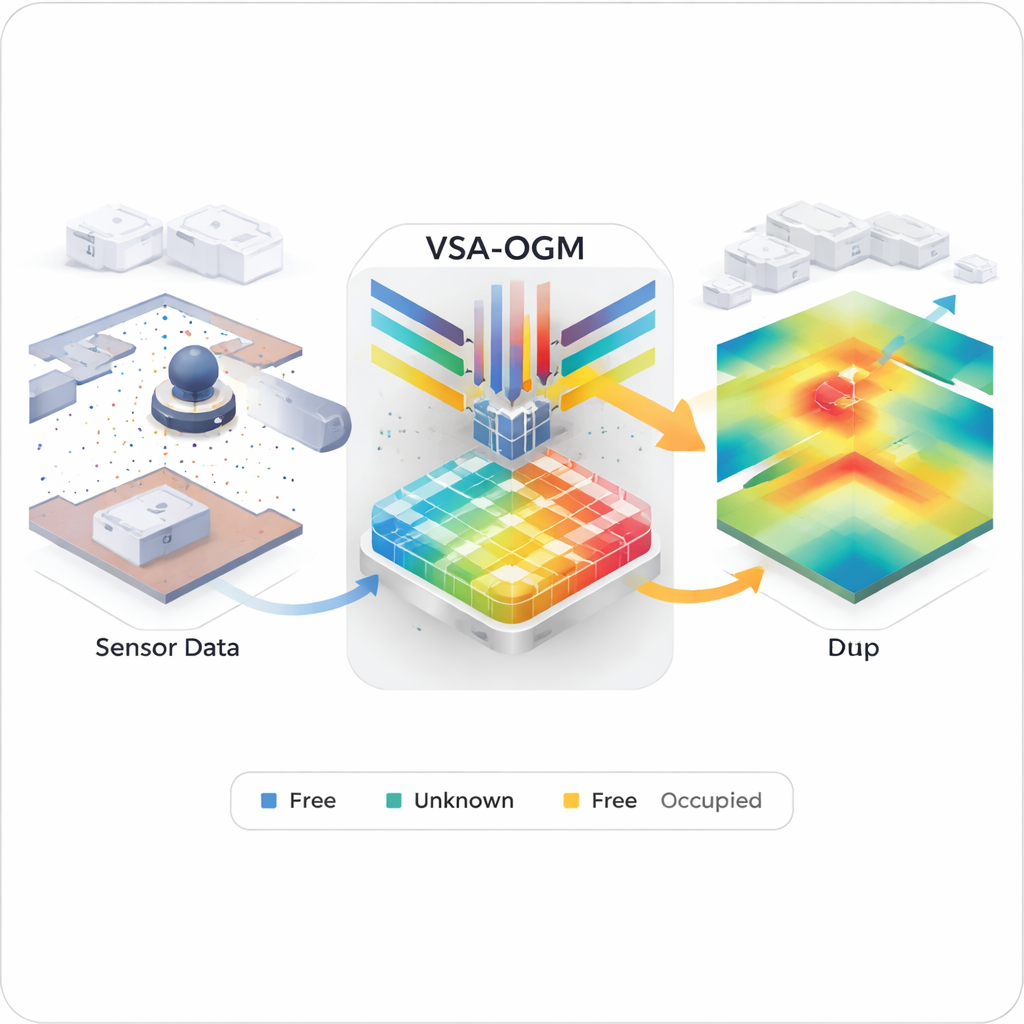
Авторы предлагают «нейро-символический» компромисс под названием VSA-OGM — Vector Symbolic Architecture Occupancy Grid Mapping. Вместо хранения каждой детали в плотной сетке или сокрытия структуры в миллионах весов нейросети, метод кодирует показания датчиков в очень длинные векторы в пространстве высокой размерности — математическая идея, вдохновлённая теориями о том, как группы нейронов могут представлять понятия и положения. Окружение делится на плитки, и у каждой плитки есть векторные памяти для доказательств «занятости» и «пустоты». По мере того как робот движется и собирает облака точек, каждое наблюдение преобразуется в один из этих гиперразмерных векторов и аккумулируется в памяти соответствующей плитки, эффективно накапливая информацию с течением времени.
От шумных векторов к чётким картам
Разумеется, объединение множества сигналов в одну память высокой размерности рискует породить шумное, трудночитаемое «комковатое» представление. VSA-OGM решает эту проблему с помощью тщательно продуманного декодирующего конвейера. Сначала он сравнивает памяти плиток с векторами, представляющими позиции в пространстве, получая грубые «квази-вероятности» заполнения. Затем применяется серия нелинейных шагов и инструмент теории информации — энтропия Шеннона — чтобы выявить, где данные однозначно поддерживают один класс по сравнению с другим. Наконец, используется функция softmax для преобразования этих сигналов в истинные вероятности, которые комбинируются в итоговую карту, показывающую знаковую разницу между «занято» и «пусто». В результате получается плавная карта заполненности, интерполирующая недостающие области измерений и при этом остающаяся полностью вероятностной и интерпретируемой.
Быстрее карты для одного робота — или для многих
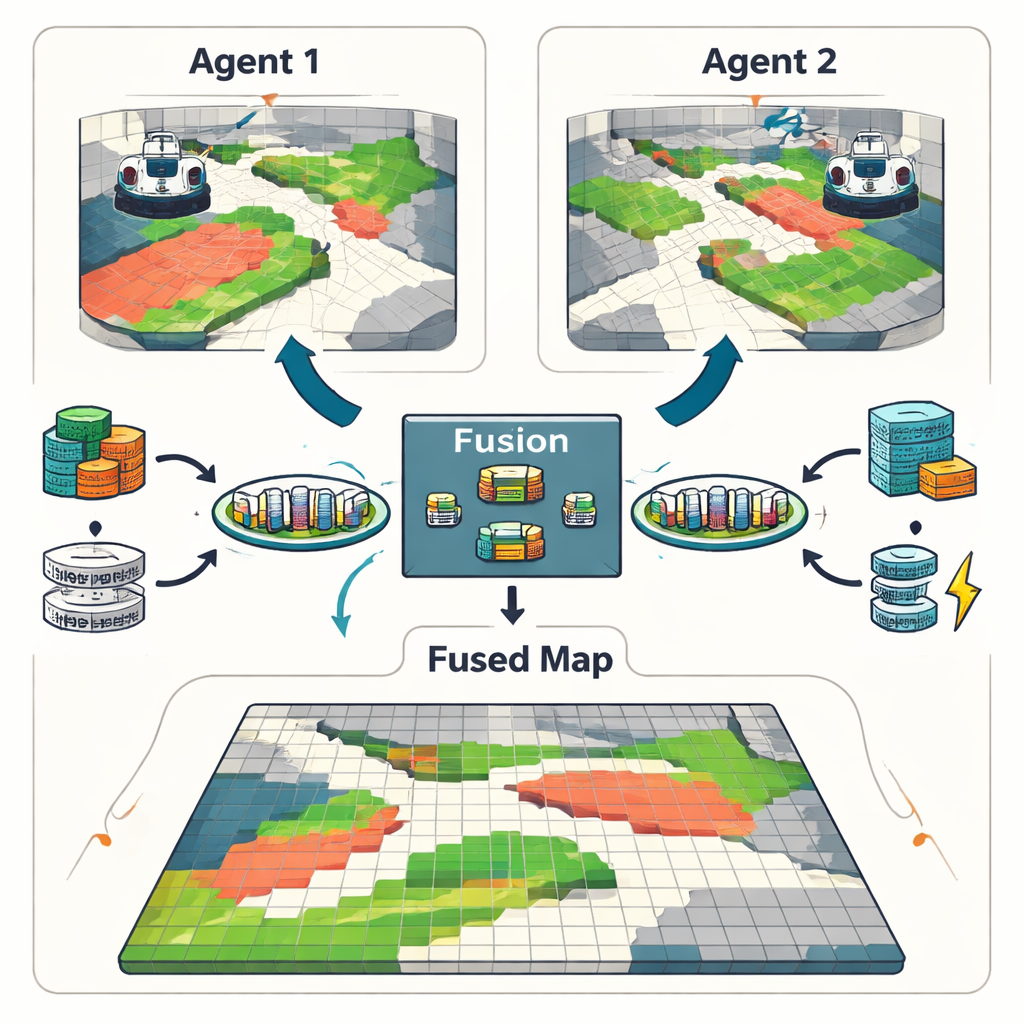
Чтобы проверить подход, исследователи запустили VSA-OGM на нескольких симулированных и реальных наборах данных, включая классическую карту внутреннего помещения и крупномасштабный сценарий вождения. По сравнению с сильными традиционными базовыми методами, которые тщательно моделируют пространственные корреляции, VSA-OGM показал сопоставимую точность картирования, но использовал примерно в 400 раз меньше памяти и работал до 45 раз быстрее. По сравнению с упрощёнными традиционными методами, которые жертвуют частью статистических деталей, он всё равно достигал сопоставимой точности при сокращении задержки примерно в пять раз. При сравнении с нейросетевой системой, требующей часов обучения и миллионов параметров, VSA-OGM обеспечивал сопоставимое качество карт без предварительного обучения и сокращал время обработки каждого кадра до шести раз. Фреймворк также поддерживает работу нескольких роботов: векторные памяти от разных агентов можно просто складывать, получая объединённые карты с минимальной потерей информации.
Что это значит для повседневных роботов
Проще говоря, эта работа показывает, что роботам не обязательно выбирать между медленной, но надёжной математикой и быстрой, но непрозрачной нейросетью при построении карт мира. Используя вдохновлённые мозгом векторы высокой размерности, VSA-OGM сохраняет ясную вероятностную структуру классических методов и одновременно достигает скорости и эффективности, необходимых для работы в реальном времени на ограниченном оборудовании. Всё ещё остаются задачи — например, работа с чрезвычайно неравномерными данными и очень плотными средами — но подход указывает путь к роботам будущего, которые смогут безопасно и надёжно понимать окружение даже на скромных бортовых компьютерах.
Цитирование: Snyder, S., Capodieci, A., Gorsich, D. et al. Brain Inspired Probabilistic Occupancy Grid Mapping with Vector Symbolic Architectures. npj Unconv. Comput. 3, 13 (2026). https://doi.org/10.1038/s44335-026-00052-w
Ключевые слова: картирование заполненности, автономные роботы, векторные символьные архитектуры, вероятностное картографирование, LiDAR-датчики