Clear Sky Science · ru
Поведенческие доказательства иерархического исполнения последовательных движений
Как наш мозг превращает простые движения в плавные действия
Повседневные задачи вроде набора текста, игры гаммы на пианино или взятия нескольких предметов со стола кажутся простыми. На самом деле мозгу нужно сцеплять множество мелких движений в гладкие, скоординированные действия. В этом исследовании задаётся на первый взгляд простой вопрос: всегда ли мозг планирует такие цепочки действий как одно длинное движение или же он строит их по шагам, используя скрытую иерархию более мелких блоков?
Достигание больших мишеней на столе
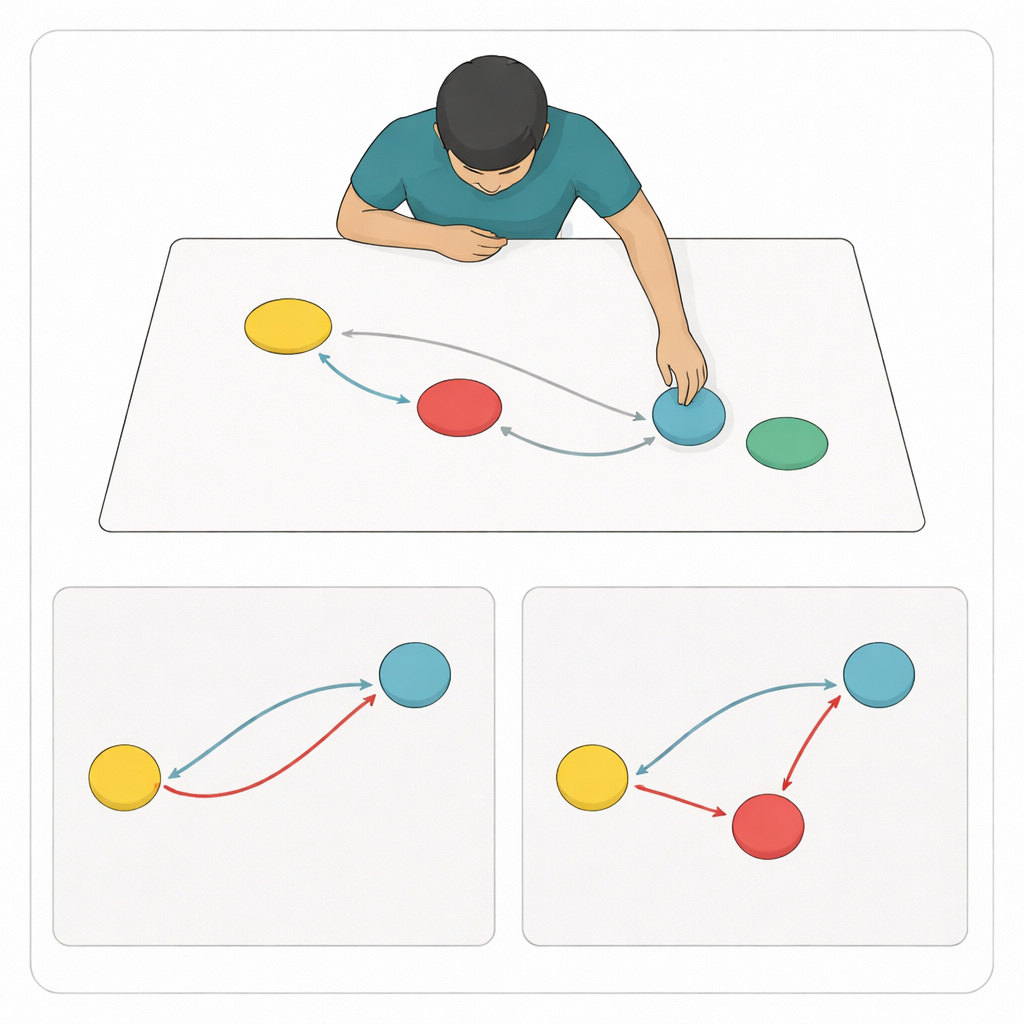
Чтобы проверить это, исследователи разработали настольную «соедини точки» игру для руки. Двадцать добровольцев сидели за столом, на поверхности которого были напечатаны несколько больших цветных кругов. Стартовый круг находился рядом с телом, остальные располагались слева, справа и выше. В каждом испытании участники слышали сигнал и должны были переместить кончик указательного пальца от стартового круга через короткую последовательность мишеней и назад как можно быстрее, но без чрезмерной точности: достаточно, чтобы кончик пальца попал в любую точку внутри круга. Такая низкоточная установка поощряла быстрые и плавные движения, позволяя траекториям изгибаться и сливаться между мишенями, а не резко останавливаться на каждом из них.
Чтение скрытых планов по кривизне траекторий руки
Вместо измерения только времени выполнения или частоты ошибок команда сосредоточилась на точной форме каждой траектории кончика пальца. Они изучали два ключевых признака. Во-первых, «проваливание по середине»: насколько траектория к текущей мишени отклонялась в сторону следующей мишени до того, как до неё добирались. Во-вторых, «поворот вокруг мишени»: насколько резко или плавно кривилась траектория при прохождении рядом с мишенью и изменении направления. Вместе эти паттерны показывают, учитывает ли движение к одной мишени уже следующую — эффект, называемый «коартикацией», похожий на то, как рот формирует предстоящие звуки во время речи. Ученые сравнили измеренные кривые с путями, сгенерированными двумя компьютерными моделями планирования движений, обе основаны на теориях оптимального управления, но различаются внутренней структурой.
«Плоские» планы против «слоистых»
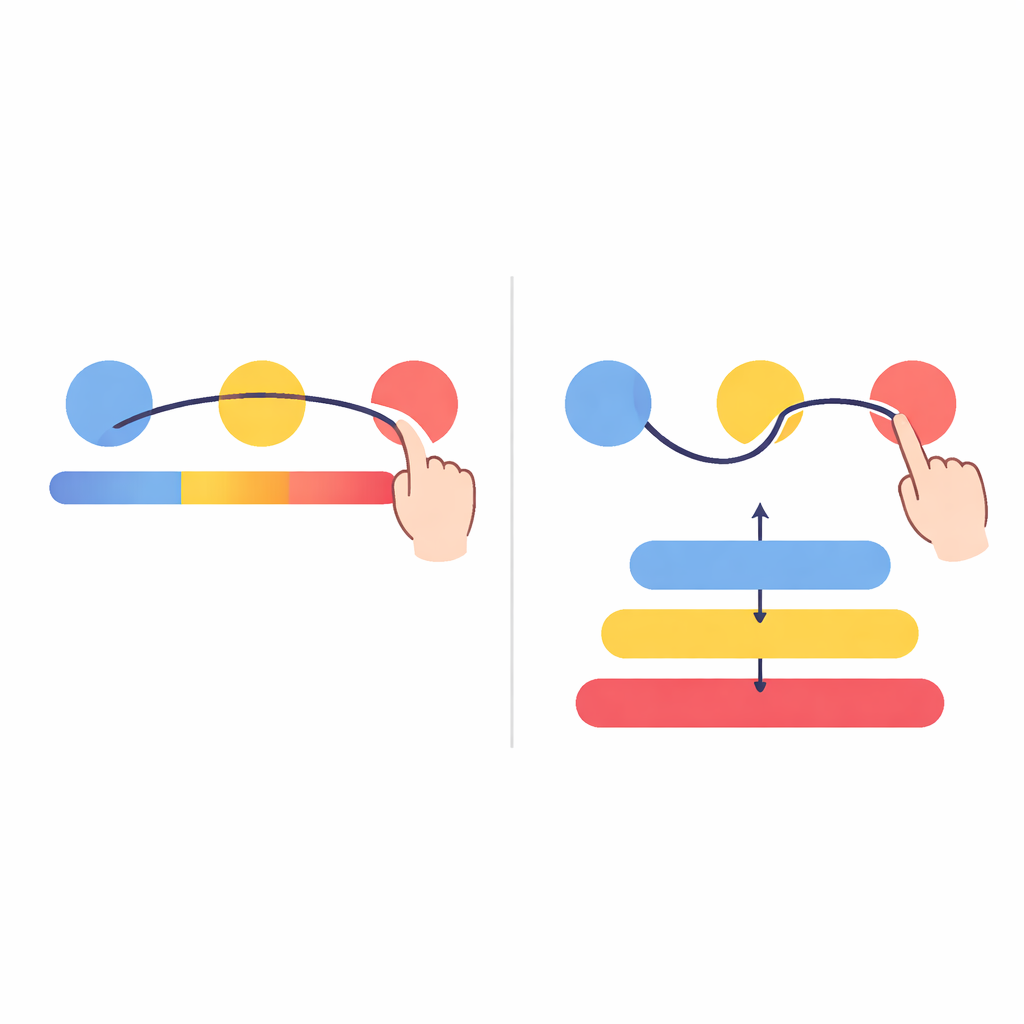
В «плоской» модели предполагается, что мозг планирует всю трёхмишенную последовательность как единый, цельный путь до начала движения. Это похоже на полностью заученный жест или «фрагмент», выполняемый разом. В таком случае проваливание по середине и повороты вокруг мишеней тесно связаны: когда планировщик определяет, насколько сильно нацеливаться на первую мишень, это во многом фиксирует форму кривых по всей последовательности. «Иерархическая» модель, напротив, добавляет простой промежуточный уровень, который на ходу стыкует более мелкие куски — например движение через две мишени с последующим возвратом к одной — в единую последовательность. Отдельная динамическая система решает, когда переключаться от одного субдвижения к следующему, позволяя форму вокруг каждой мишени регулировать более независимо, сохраняя при этом общую плавность движения.
Поведение, похожее на иерархическое
При многочисленных симуляциях исследователи обнаружили, что плоская модель просто не может сгенерировать некоторые сочетания проваливания по середине и поворота, которые естественно демонстрировали люди. В частности, часто наблюдали сильное отклонение в сторону второй мишени в первой части движения, при этом вокруг второй мишени делали резкий или иначе оформленный поворот — паттерны, которые плоский планировщик не мог воспроизвести. Иерархическая модель, однако, могла воссоздать эти смешанные поведения, динамически связывая отдельные «субдвижения» на промежуточных мишенях. Сравнив реальные данные с обеими моделями, авторы пришли к выводу, что почти для половины записанных последовательностей однозначно требуется иерархическое объяснение, в то время как другие были совместимы с плоским планированием, что указывает на гибкую смену стратегий в зависимости от конкретной последовательности.
Что это значит для повседневных навыков
Результаты указывают на то, что даже без длительной тренировки или строго отточенных рутин мозг часто опирается на слоистые планы при составлении простых последовательных достижений. Вместо того чтобы всегда сжимать последовательность в один жёсткий фрагмент, моторная система, по-видимому, сохраняет повторно используемые куски движения и соединяет их в реальном времени. В процессе тренировки такие цепочки могут постепенно сворачиваться в более плоские, полностью «сфрагментированные» действия, что помогает объяснить, как навыки становятся быстрыми и автоматическими. Эта работа даёт новое геометрическое окно в то, как мозг организует движение, и может направить будущие исследования по моторному обучению, реабилитации и проектированию роботов, двигающихся с похожей адаптивной грацией.
Цитирование: Cuevas Rivera, D., Kiebel, S.J. Behavioral evidence for the hierarchical execution of sequential movements. Commun Psychol 4, 52 (2026). https://doi.org/10.1038/s44271-026-00436-5
Ключевые слова: контроль движения, планирование движений, разбиение на фрагменты, иерархическое поведение, последовательные движения руки