Clear Sky Science · ru
Захват через разрушение: динамический удар обеспечивает предсказуемое роботизированное закрепление на пресноводном льду
Восхождение там, где почти нет гравитации
Представьте, что вы пытаетесь залезть на замёрзший обрыв, где гравитация настолько мала, что собственный вес не помогает ботинкам вгрызаться в поверхность. Именно с такой задачей столкнутся роботы будущих миссий на ледяные луны вроде Энцелада, где учёные надеются искать признаки жизни в глубоких ледяных вентиляционных ходах и пещерах. В этой статье описан новый способ, позволяющий роботам зацепляться за лёд с помощью быстрых, молотковых ударов и плотного зажима — вдохновлённый ледорубами альпинистов. В результате получена лёгкая система якорения, требующая гораздо меньших усилий и энергии по сравнению с современными ледовыми винтами или нагревными крюками, что потенциально делает ранее недоступные ледяные миры более достижимыми.

Почему удержаться за лёд так сложно
На Земле альпинист может опереться всем весом на ледовый винт или ледоруб, чтобы врезаться в поверхность. На Энцеладе гравитация всего около одного процента земной, поэтому робот не может полагаться на свой вес, чтобы вдавить инструмент в лёд. Существующие варианты имеют существенные недостатки. Ледовые винты требуют больших усилий на вдавливание, настолько больших, что на Энцеладе роботу, вероятно, придётся весить как большой марсоход, чтобы эффективно их использовать. Нагревные «термические крюки» могут «вплавляться» в лёд при минимальном давлении, но расходуют огромные количества энергии при каждом применении — серьёзное ограничение для космических аппаратов, действующих далеко от Солнца. Кроме того, многие современные роботы-альпинисты зависят от шероховатостей скалы, вакуума (соприкосновения), или специальных клеев, которые плохо работают на гладких, но волнистых поверхностях естественного ледника.
Заимствование приёма у людей-ледолазов
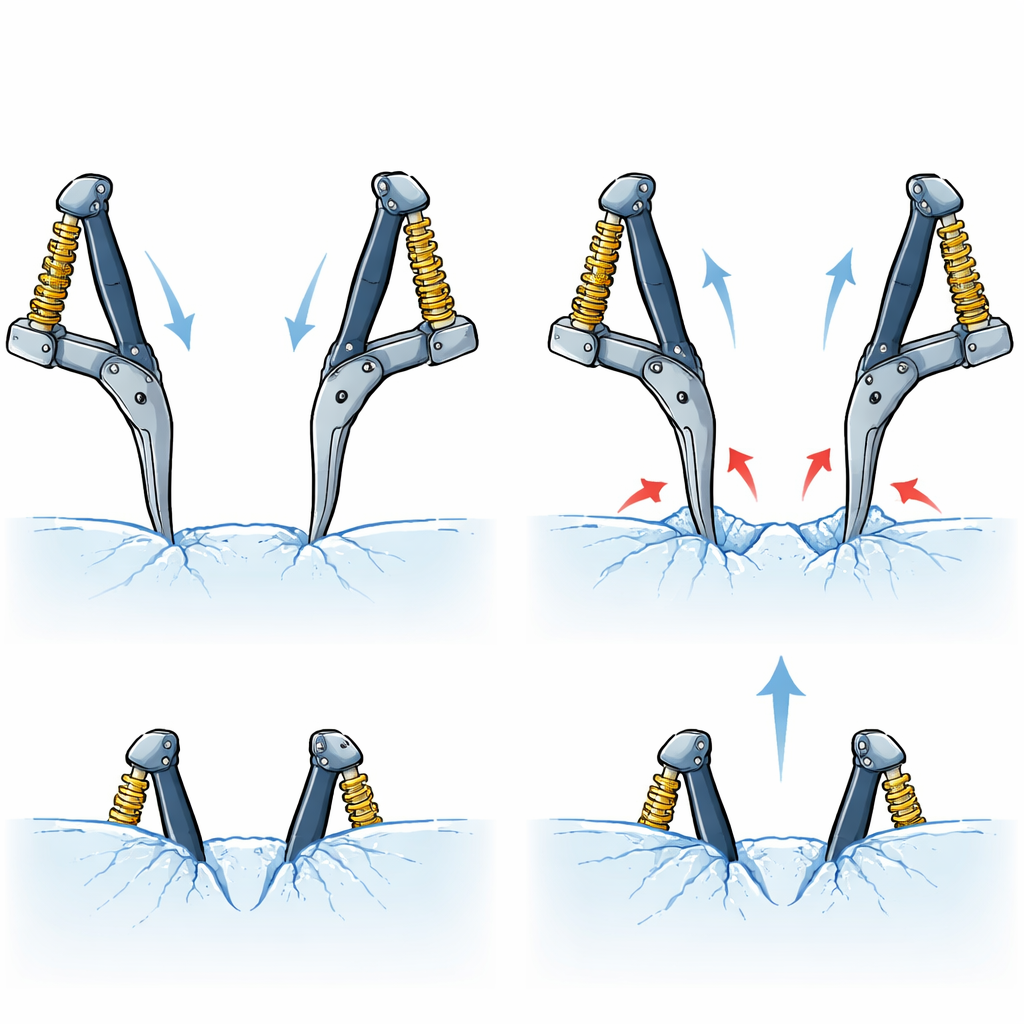
Авторы предлагают иной подход: вместо того чтобы приспосабливаться к поверхности льда, создать собственные точки захвата. Их устройство использует два маленьких ледоруба, смонтированных на компактном захвате. Сначала в пружинах внутри рычагов накапливается умеренное количество механической энергии. При отпускании ледорубы раскачиваются как крошечные молотки и наносят удар по льду, выбивая небольшие углубления. Затем тот же механизм сжимает ледорубы друг к другу так, что их кончики цепляются за новые впадины. Этот двухэтапный процесс — удар, затем захват — превращает гладкий участок льда в то, за что робот может уцепиться, и его легко отменить, чтобы сделать «шаг» дальше. Весь цикл приводится в действие одним мотором, который и заводит пружины, и затягивает зажим.
Проверка физики сцепления
Чтобы удостовериться в надёжности подхода, команда построила математические модели того, насколько глубоко врежутся кончики ледорубов и сколько энергии может вернуть отскок после удара. Затем они испытали одиночные ледорубы, раскачивающиеся как маятники, в блоки пресноводного льда, охлаждённого до типичных температур ледника. Сравнивая теорию и эксперимент, они выяснили, что модели умеют предсказывать глубину образуемых впадин и оценивать энергию «отскока», когда ледоруб отскакивает назад. Используя эти результаты, они рассчитали, с каким усилием робот должен прижимать захват к льду перед ударом, чтобы ледорубы остались в новых впадинах, а не выпрыгнули. Для выбранной энергии пружины модель предсказала, что примерно 16 ньютонов давления — примерно вес пары литров воды на Земле — обеспечат почти гарантированный успех.
От лабораторного стола до ледниковой стены
Вооружившись моделями, исследователи испытали полный двухледорубный захват. В лаборатории они подтвердили, что удары с накопленной энергией пружины в 8 джоулей способны сформировать достаточно глубокие впадины, требуя при этом значительно меньшего начального давления, чем ледовые винты, и гораздо меньшей энергии, чем термические анкеры. Затем они измерили прочность окончательного захвата, оттягивая устройство прямо с поверхности льда. Регулируя силу сжатия ледорубов, они обнаружили два сценария отказа: при слабом зажиме кончики выскальзывают из впадин; при очень сильном зажиме сами ледяные уступы отламываются. Между этими крайностями находится оптимальная зона, где захват мог выдерживать более чем вдвое больший вес, чем его собственный. Полевые испытания на французском леднике показали, что устройство может закрепляться на крутом естественном льду, плотном снегу и даже на стволах деревьев, скалах и уплотнённой земле, подтвердив работоспособность метода «удар-и-захват» вне лаборатории.
Что это значит для будущих исследователей
Исследование показывает, что разрушение и зажимание льда может быть очень эффективным способом для роботов подниматься и удерживаться в суровых условиях с низкой гравитацией. Используя тот факт, что раскалывание льда требует намного меньше энергии, чем его плавление, двухледорубный захват формирует прочные, обратимые якоря при скромных усилиях и всего нескольких джоулях энергии на шаг. Для миссий на Энцелад или другие ледяные миры такая система могла позволить небольшим, ограниченным по энергии роботам безопасно спускаться в вентиляционные ходы или висеть на стенах утёсов, отбирая пробы, которые могут дать ответ на вопрос о существовании жизни за пределами Земли. Та же идея также может помочь земным роботам исследовать ледники, ледяные пещеры и хрупкие каменные склоны, которые слишком опасны или недоступны для людей.
Цитирование: Galassi, A., Trebi-Ollennu, A., Papadopoulos, P. et al. Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice. npj Robot 4, 22 (2026). https://doi.org/10.1038/s44182-026-00085-0
Ключевые слова: роботизированное восхождение по льду, планетарная разведка, роботизированные захваты, якорение через разрушение льда, миссии на Энцелад