Clear Sky Science · ru
Конкретное планирование траекторий для мультиагентов, допускающее кинодинамически агрессивные манёвры
Роботы, которые умеют «танцевать» в потоке
Представьте себе десятки летающих и наземных роботов, стремительно перемещающихся по складу, которые не сталкиваются друг с другом и выполняют задания быстрее, чем смогли бы люди-водители. В этой статье описан новый способ организовать такой роботизированный «транспорт», чтобы множество машин могло двигаться агрессивно и быстро в стеснённых условиях, оставаясь при этом в безопасности. Работа важна тем, что те же идеи однажды могут обеспечить управление парками роботов на заводах, в складах и службах доставки, которые должны работать непрерывно в нашей повседневной среде.
Почему управлять большим количеством роботов так сложно
Координировать толпу роботов гораздо сложнее, чем управлять одним. Каждый робот должен добраться от начальной точки до цели, не врезавшись, не заблокировав других и не застряв в бесконечных петлях. Современные подходы обычно лежат на двух крайностях. Некоторые методы рассматривают роботов как фишки на сетке: это делает планирование для сотен машин быстрым и математически аккуратным, но получающиеся траектории часто игнорируют, как реальные устройства разгоняются или поворачивают. Другие методы моделируют полное физическое движение и выдают гладкие, качественные траектории, но становятся ужасно медленными или ненадёжными, когда число роботов вырастает более чем на несколько штук.
Средний путь: «конкретное» планирование
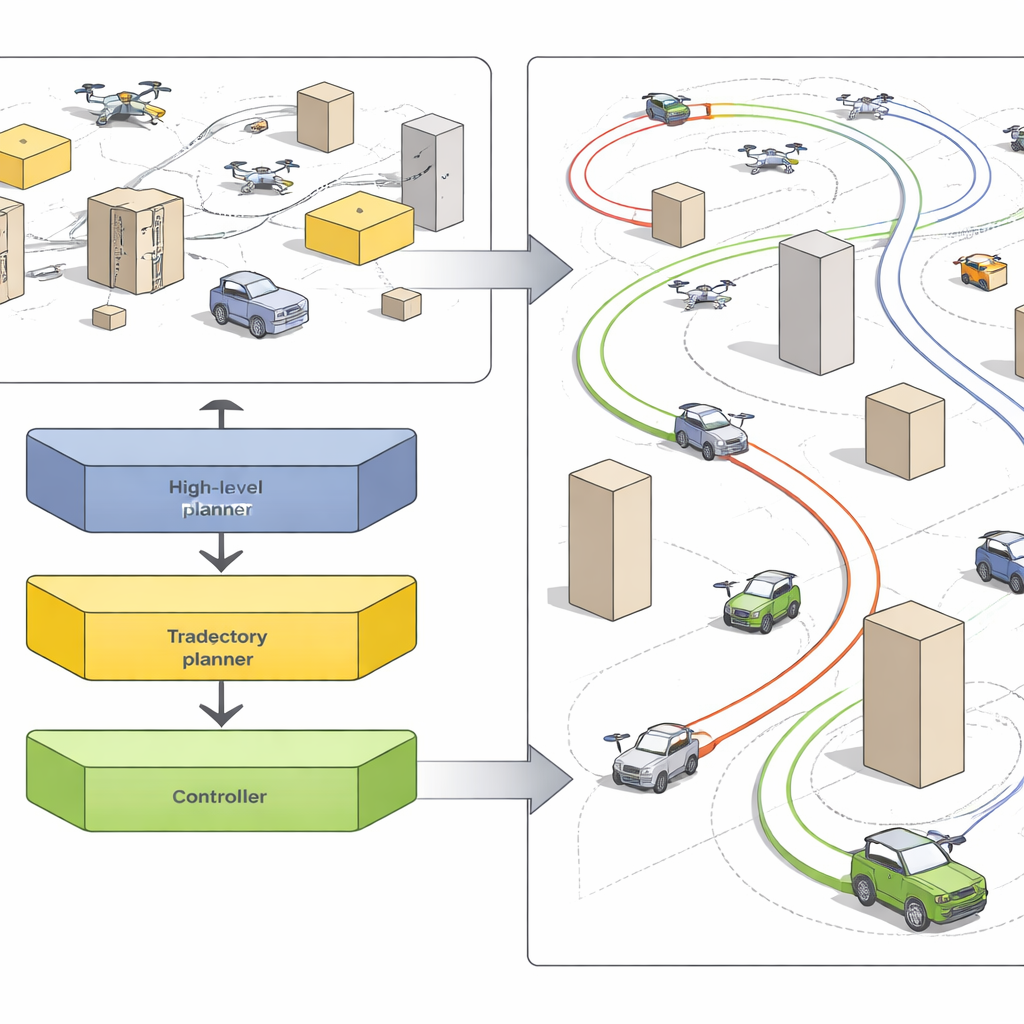
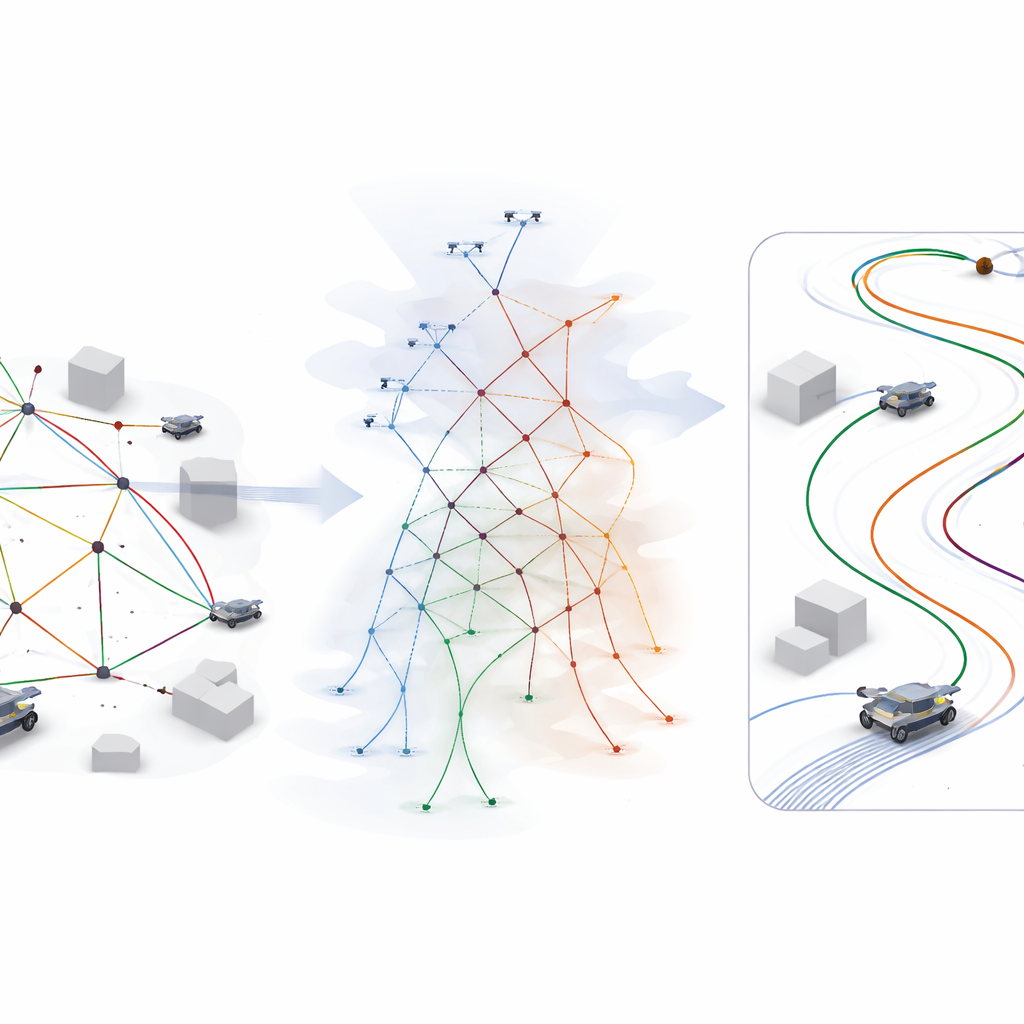
Авторы предлагают гибридную стратегию, которую они называют «конкретным» планированием для мультиагентов. Идея в том, чтобы совместить чёткую структуру планирования на сетке с реалистичным представлением о том, как роботы действительно двигаются. Вместо работы исключительно в абстрактной сетке или в полностью непрерывной физике система использует многоуровневое описание движения. Центральный планировщик ищет по дискретному набору возможных действий для всех роботов сразу, но каждое действие насыщено предсказаниями о том, сколько времени займёт исполнение, как робот может отклониться от заданной линии и насколько близко он сможет безопасно пройти мимо других. Эти предсказания получены из моделей, обученных на данных реальных экспериментов, так что планировщик «знает», как его флот ведёт себя на практике.
От грубых набросков к точному движению
Как только связанный планировщик сгенерировал безопасные, не конфликтующие последовательности путевых точек для каждого робота, фреймворк уточняет их. Второй модуль превращает каждую грубую траекторию в плотную, гладкую кривую, которая учитывает ограничения по тяге, рулению и другим физическим факторам. Чтобы сделать это быстро, авторы сначала офлайн провели тяжёлую численную оптимизацию и сгенерировали множество примеров почти оптимального по времени движения, затем обучили трансформерные нейросети имитировать эти примеры. Во время работы эти сети могут генерировать высококачественные эталонные траектории менее чем за миллисекунду. Третий слой — модельный предиктивный контроллер с фильтром безопасности — постоянно корректирует команды, чтобы следовать этим эталонам, и использует локальные сенсоры для уклонения от неожиданностей, таких как блуждающие препятствия или небольшие ошибки слежения.
Испытание сорока роботов
Команда продемонстрировала систему на смешанном составе: 20 квадрокоптеров, 8 наземных роботов и 12 роботов, выступавших в роли движущихся препятствий — все одновременно в помещениях размером с комнату. В одном наборе экспериментов рои дронов пронеслись по стеснённым пространствам со скоростями выше пяти метров в секунду, избегая столкновений в своеобразном трёхмерном балете. В другом сценарии наземные роботы многократно пересекали захламлённую область с случайно движущимися препятствиями, выполняя больше миссий, с меньшим числом остановок и без столкновений по сравнению с конкурирующими методами. Самые требовательные испытания включали все 40 роботов, выполнявших несколько миссий подряд, при этом система непрерывно перепланировала траектории по требованию без тупиков и аварий.
Намёки на будущие системы доставки и складов
Чтобы показать, как это может применяться в реальных задачах, авторы устроили имитации «последней мили» и складских операций. В сценарии доставки наземные роботы доставляли дронов к «берегу реки», откуда дроны взлетали, летели к разбросанным точкам сброса, возвращались к подвижным базам и затем возвращались на стартовую площадку — всё это с обходом движущихся препятствий. В складской демонстрации команды дронов многократно перевозили виртуальные посылки между стеллажами и зонами выдачи, удерживая плотное, манёвренное движение и высокий пропускной поток. Для этих кейсов потребовалась лишь незначительная настройка фреймворка, что подчёркивает его способность адаптироваться к новым платформам и миссиям.
Что это означает в перспективе
Проще говоря, эта работа показывает, что можно заставить большие команды роботов двигаться смело и безопасно в тесных, меняющихся пространствах, аккуратно сочетая быстрое высокоуровневое планирование, реалистичные модели движения и крайние меры безопасности. «Конкретный» подход превращает абстрактные планы в движения, которые реальные машины способны выполнить на скорости, при этом обеспечивая гарантии против столкновений и взаимных блокировок в многих практических ситуациях. Хотя чрезвычайно хаотичные среды и полностью неизвестные пространства по‑прежнему остаются вызовом, фреймворк указывает путь к будущему, где парки доставочных дронов, складских роботов и других автоматизированных рабочих смогут сосуществовать в переполненных условиях без постоянного человеческого контроля.
Цитирование: Okumura, K., Yang, G., Gao, Z. et al. Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers. npj Robot 4, 20 (2026). https://doi.org/10.1038/s44182-026-00083-2
Ключевые слова: координация мульти-роботов, планирование траекторий, роевые роботы, автоматизация складов, доставка дронами