Clear Sky Science · ru
Адаптивная стратегия компенсации по вдохновению от насекомых при дефиците обонятельных ощущений для роботической локализации источника запаха
Почему потеря сенсора не означает потерю следа
Представьте робота поисково-спасательной службы, пытающегося учуять утечку газа или найти захваченного под завалами человека — и вдруг выходит из строя один из его ключевых датчиков. Современные роботы часто сильно теряют работоспособность при подобных повреждениях. В этом исследовании авторы черпают вдохновение у удивительного специалиста по навигации по запаху — самца шелкопряда — чтобы показать, как животные продолжают отслеживать источник запаха даже после потери половины «носа», и как эту стратегию можно воспроизвести в четырёхногих роботах.
Крошечный навигатор с мощным обонянием
Многие животные — от насекомых до собак — используют летучие химические сигналы, чтобы находить пищу, партнеров или безопасное укрытие. Запахи особенно полезны, когда зрение закрыто тьмой, дымом или завалами. Но реальные дымки запаха беспорядочны: ветер меняет направление, здания и деревья искажают поток, и сильнейший запах не всегда находится прямо по ветру от источника. Большинство роботов-искателей запаха предполагают, что все их обонятельные датчики работают идеально и направление запаха совпадает с направлением ветра. В природе ни одно из этих предположений не всегда верно. Шелкопряд Bombyx mori служит естественным контрпримером: самцы способны находить самок, выделяющих половые феромоны, даже в турбулентном воздухе и, что примечательно, даже если одна из двух их усиков — основных органов обоняния — удалена.
Как моли справляются после потери усика
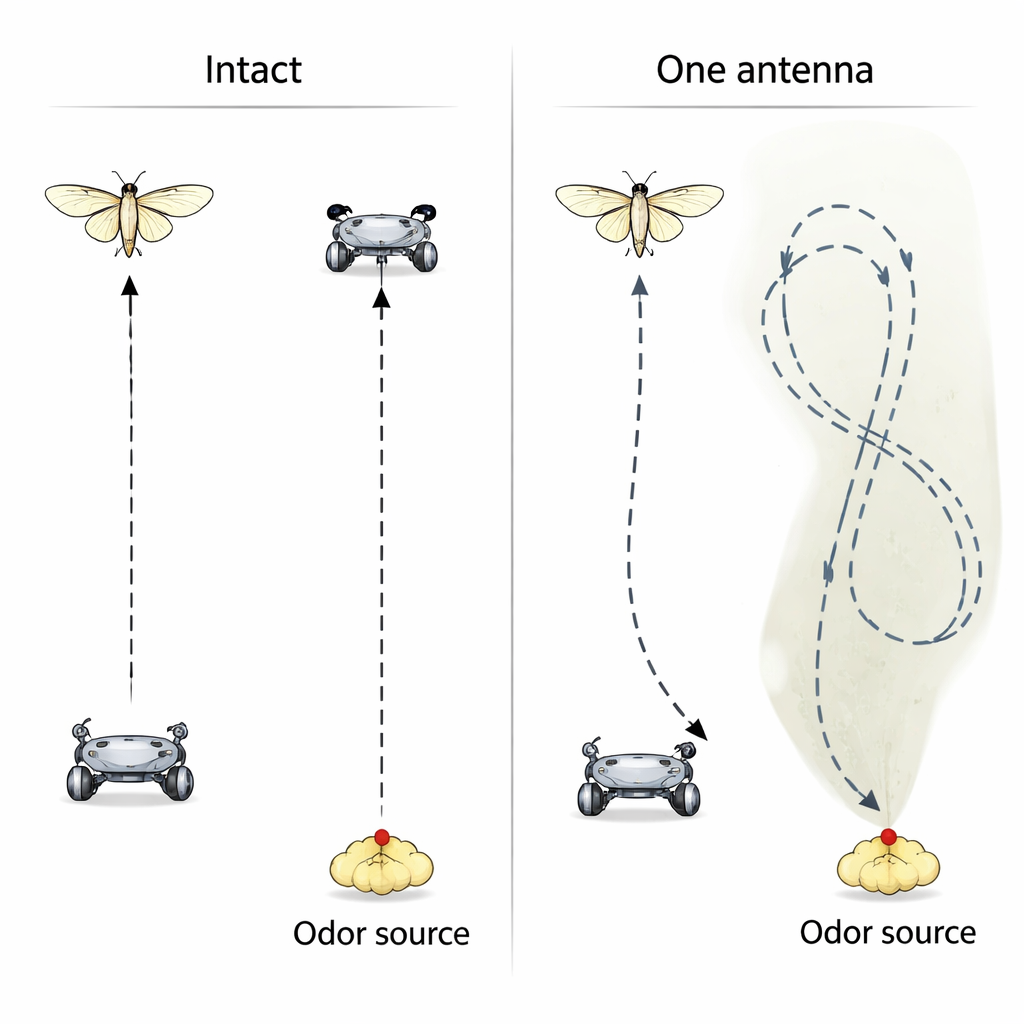
Исследователи сначала проверили, как хорошо цельные самцы шелкопряда и самцы с удалённым левым усиком могут дойти до источника запаха в лабораторных условиях. Обе группы стартовали в 15 сантиметрах от точки, выделяющей феромон. Удивительно, но доля успешных выходов — достижение источника в течение минуты — существенно не снизилась после удаления одного усика. Изменился сам маршрут: цельные моли шли относительно прямой дорогой, тогда как моли с одним усиком двигались дольше и по более извилистым траекториям, склоняясь в сторону оставшегося усика. Детальные измерения движений головы показали, что моли переключали стратегию поворота в зависимости от того, в какой части оставшегося усика обнаруживался запах — у основания или на кончике — и в какую сторону они в данный момент поворачивали.
Две простые правила, скрытые в сложном поведении
Пульсируя запах слева и справа и отслеживая углы головы моли, команда преобразовала поведение в вероятностные кривые, показывающие, насколько вероятно, что моль повернёт влево или вправо после каждого порции запаха. Когда запах попадал ближе к основанию усика, моль с большой вероятностью продолжала вращаться в ту же сторону, по существу закрепляя текущий поворот. Когда же запах попадал ближе к кончику, выбор становился более сбалансированным, с лёгким сдвигом в сторону исследования противоположной стороны. Проще говоря, потеря усика не заставляла моль сдаваться; она заставляла моль принять поисковую стратегию, которая шире исследует обе стороны пространства, особенно вдоль «кромки» пласта запаха, где интенсивность запаха меняется быстро.
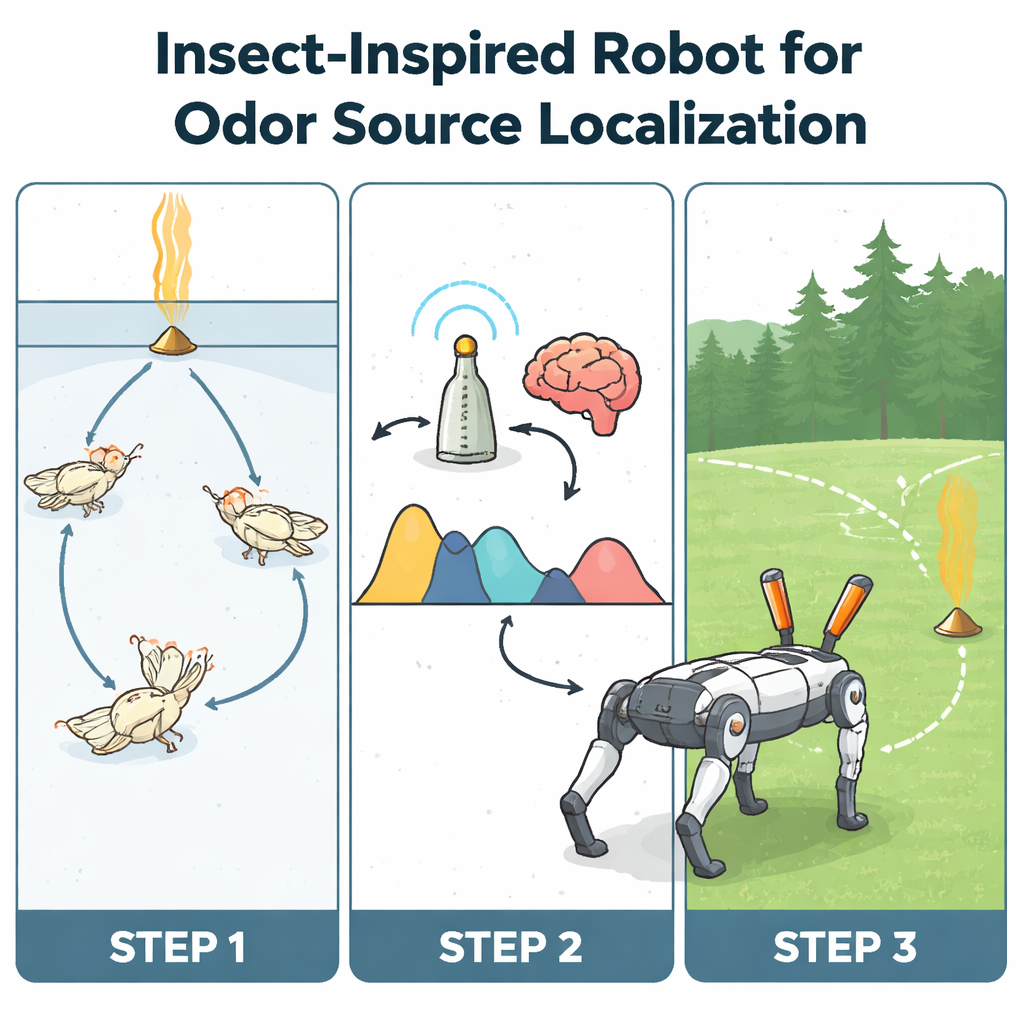
Обучение четырёхного робота «нюхать» как моль
Далее исследователи создали четырёхного робота с обонятельными датчиками на «голове», устроенными так, чтобы имитировать структуру усика от основания к кончику. Они разработали два алгоритма поиска. Первый, стандартный подход по образцу моли, называемый SZL (от surge–zigzag–loop — рывок–зигзаг–петля), предполагает работу двух датчиков и выбирает направление прямого «рывка» на основе относительного времени срабатываний слева и справа. Второй, названный контекстно-зависимым по образцу моли (CDMI), встраивает новые правила моли: он оценивает, в какой части оставшегося датчика обнаружен запах, и использует вероятностные кривые, полученные в экспериментах на животных, чтобы решить, в какую сторону двигаться и насколько резко поворачивать. В помещениях SZL работал лучше при наличии обоих датчиков, обеспечивая быстрые и сравнительно прямые траектории. Но при отключении одного датчика CDMI явно превзошёл SZL, чаще находя источник за счёт отслеживания меняющейся кромки облака запаха по петляющим траекториям, похожим на движения моли с одним усиком.
Роботы, которые остаются работоспособными при поломках
Чтобы проверить идею в сложных условиях, команда испытала роботов на открытом воздухе, где естественный ветер и турбулентность делают облака запаха крайне фрагментированными. Целому роботу дали обычный алгоритм SZL, а роботу с одним датчиком — CDMI. Оба показали сопоставимые показатели успеха, но повреждённый робот с адаптивной стратегией, вдохновлённой молью, часто находил источник по более коротким и менее извилистым траекториям. Это указывает на то, что в грубых реальных условиях выгодно переключаться с точной но хрупкой схемы восприятия на более исследовательскую стратегию следования по кромке. Более широкое послание таково: для надёжной навигации не требуется всё более сложный искусственный интеллект. Простые, биологически обоснованные правила — связанные с расположением сенсоров на теле и взаимодействием тела с окружающей средой — помогают создавать роботов, которые продолжают работать даже при отказе ключевых частей, что критично для длительных исследовательских и спасательных миссий.
Цитирование: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
Ключевые слова: обонятельная навигация, робототехника, вдохновлённая биологией, локализация источника запаха, ИИ по образцу насекомых, воплощённый интеллект