Clear Sky Science · ru
Прикасательно-реактивный захват с активной ладонью для ловкой манипуляции
Роботы, которые чувствуют то, что держат
Представьте робота, который аккуратно срывает спелую клубнику, отвинчивает детобезопасную крышку или вкручивает лампочку над головой — и делает это без раздавливания, урона или смещения предмета. В этой статье описан новый роботизированный захват, который приближает машины к таким деликатным, человеческим навыкам руки, снабжая робот не только «умными» пальцами, но и активной, высокочувствительной ладонью.
Ладонь, которая делает больше, чем просто держит
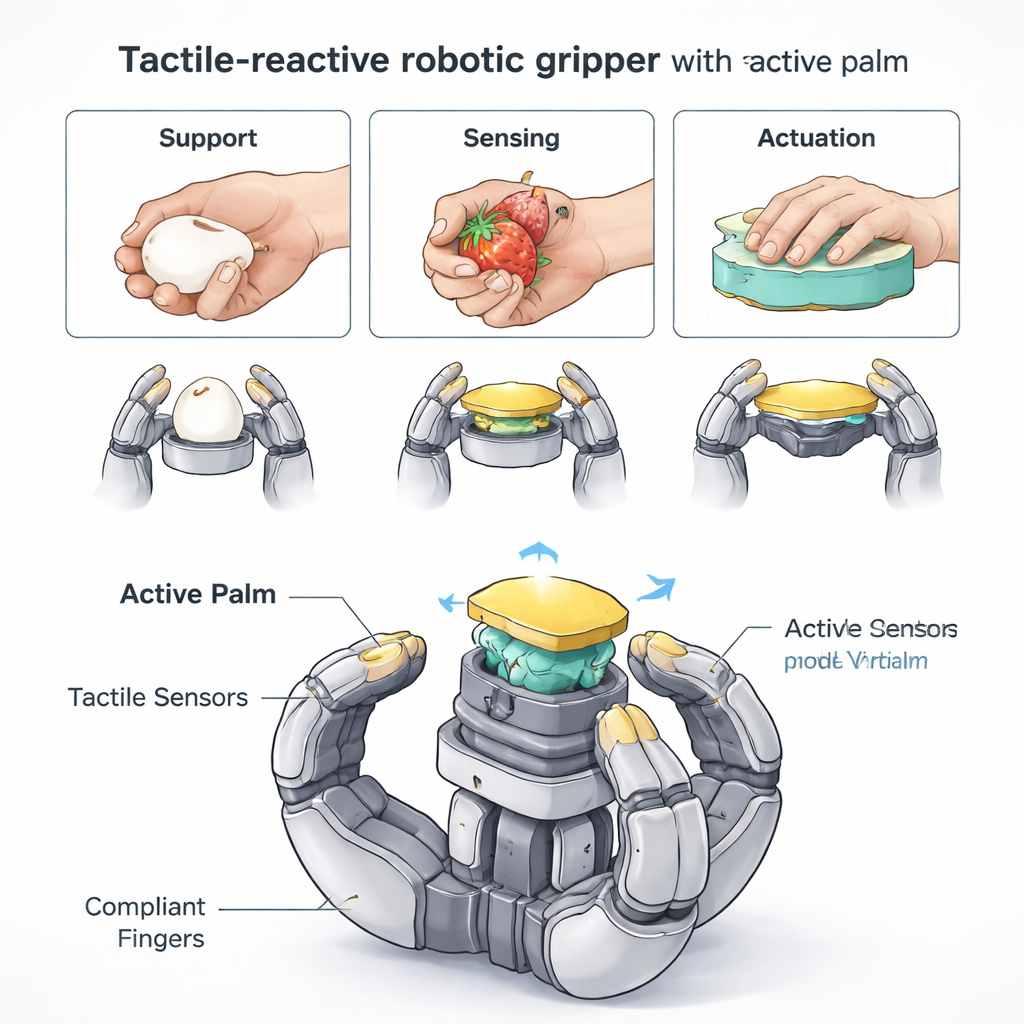
Большинство современных роботических рук либо имеют простые жёсткие клещи, которые лишь захватывают, либо очень сложные много‑пальцевые манипуляторы, которые трудно конструировать и управлять. Ключевая идея этой работы в том, что человеческие руки во многом полагаются на ладонь — не только на пальцы — для опоры, осязания и приложения силы. Исследователи спроектировали трёхпальцевый роботизированный захват с центральной ладонью, которая может двигаться вверх и вниз и покрыта камерным сенсором касания. Каждый кончик пальца также оснащён гибкой площадкой для измерения давления. В совокупности эти элементы позволяют захвату чувствовать, где и как он касается объекта, и в реальном времени корректировать захват, хотя в системе всего семь подвижных сочленений.
Простые движения — множество способов держать
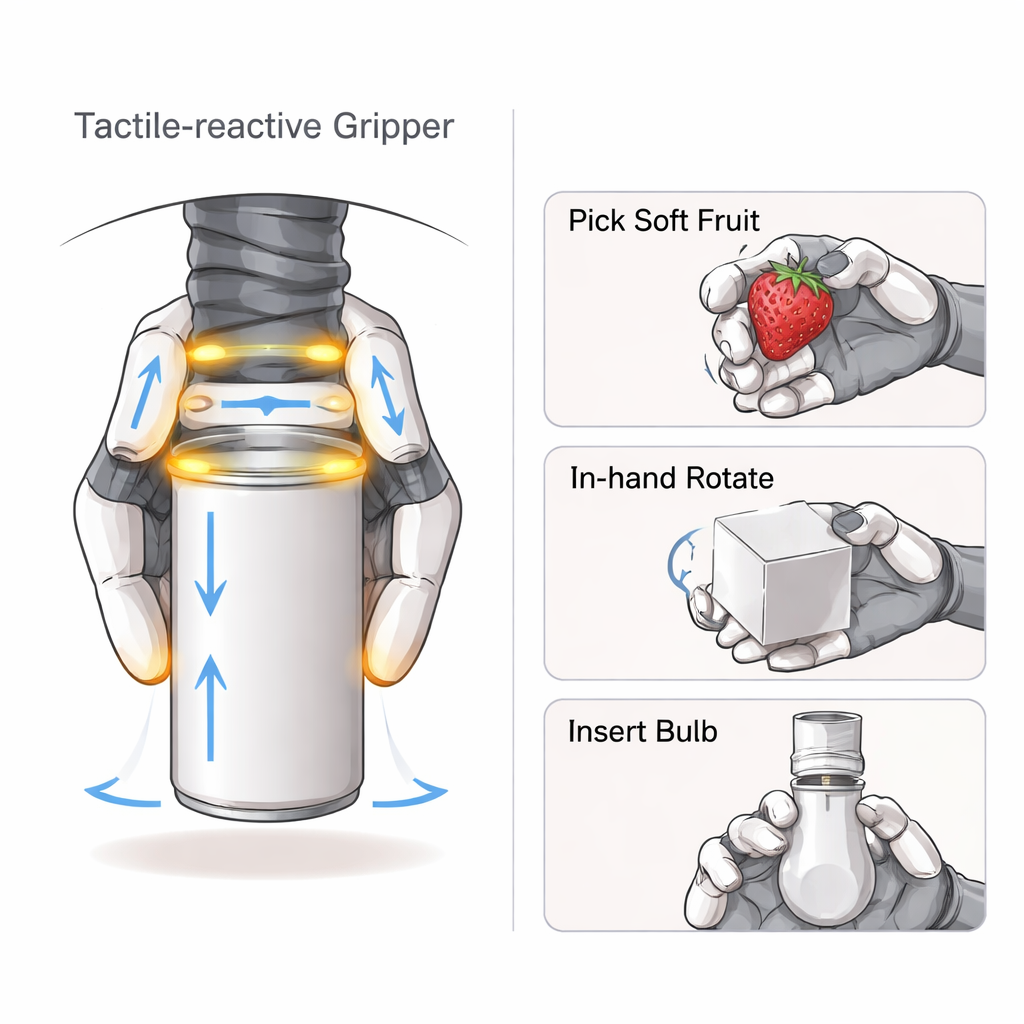
Три идентичных пальца захвата могут размахиваться и сгибаться, обеспечивая несколько повседневных стилей захвата: обхват крупных предметов, например мячей; щипок для тонких объектов, таких как карты; и силовой хват для тяжёлых инструментов. Мягкая, хребтеобразная структура пальцев естественно охватывает объекты разных форм без сложного программирования. Между тем ладонь скользит вертикально, как лифт: она может прижиматься к объекту, разделять нагрузку с пальцами или смещать положение предмета в руке. Моделирование и эксперименты показывают, что даже при всего двух суставах на палец плюс подвижной ладони рука может перемещать объекты во многих направлениях и избегать неуклюжих, трудноуправляемых положений.
Ощущение пальцами и ладонью
Чтобы понять, что она держит, захват объединяет три вида сенсорики: подробные изображения прикосновения с ладони, карты давления с кончиков пальцев и показания собственных углов сочленений. Система машинного обучения сливает эти сигналы, уделяя больше внимания тем подсказкам, которые полезнее для конкретного объекта. В испытаниях с банками и мячами разного размера и материала система смогла распознавать удерживаемые предметы с точностью почти 99%. Это богатое ощущение осязания также управляет силой сжатия, моментом остановки закрытия пальцев и движением ладони, чтобы сохранять контакт стабильным, не создавая чрезмерного трения.
От тестовых объектов до фруктов и лампочек
Команда проверила захват по широко используемому бенчмарку по хвату робота с повседневными предметами, такими как мячи, инструменты и мелкие детали. Он набрал больше баллов, чем несколько известных исследовательских захватов, при использовании меньшего числа подвижных частей. Помимо тестов, захват продемонстрировал способность собирать хрупкие фрукты — клубнику, виноград, помидоры и другие — без видимых синяков даже спустя дни, что подтвердили под ультрафиолетовым светом. Он также мог точно перемещать и поворачивать блоки и цилиндры в руке, вкручивать лампочку в патрон, направленный вверх, нажимать поршень шприца, удерживая трубку, и открывать крышки с защитой от детей методом прижатия и прокручивания. Во многих из этих задач подвижная ладонь обеспечивала дополнительный толчок, опору или сенсорную информацию, которых не хватает захватам лишь с пальцами.
Почему это важно для будущих роботов
Работа показывает, что роботам не всегда нужны всё новые пальцы или больше сочленений, чтобы стать искусными. Тщательно координируя несколько комплаентных (упругих) пальцев с активно управляемой, чувствительной к касаниям ладонью, этот захват сочетает силу, деликатность и осведомлённость, которые начинают напоминать человеческую руку. Поскольку детали в основном изготовлены на 3D‑принтере и используют коммерчески доступные сенсоры, конструкция относительно легко воспроизводима. С дальнейшим развитием методов обучения подобные захваты могли бы помогать роботам паковать продукты, оказывать помощь в домашнем уходе или безопасно работать рядом с людьми на заводах — уверенно ощущая то, что они делают, а не полагаясь лишь на догадки.
Цитирование: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
Ключевые слова: роботизированный захват, осязательная сенсорика, ловкая манипуляция, роботизированная рука, активная ладонь