Clear Sky Science · ru
Использование проприоцепции в мягких водных крыльях обеспечивает гибридное пассивно-активное подавление возмущений
Умные крылья под водой
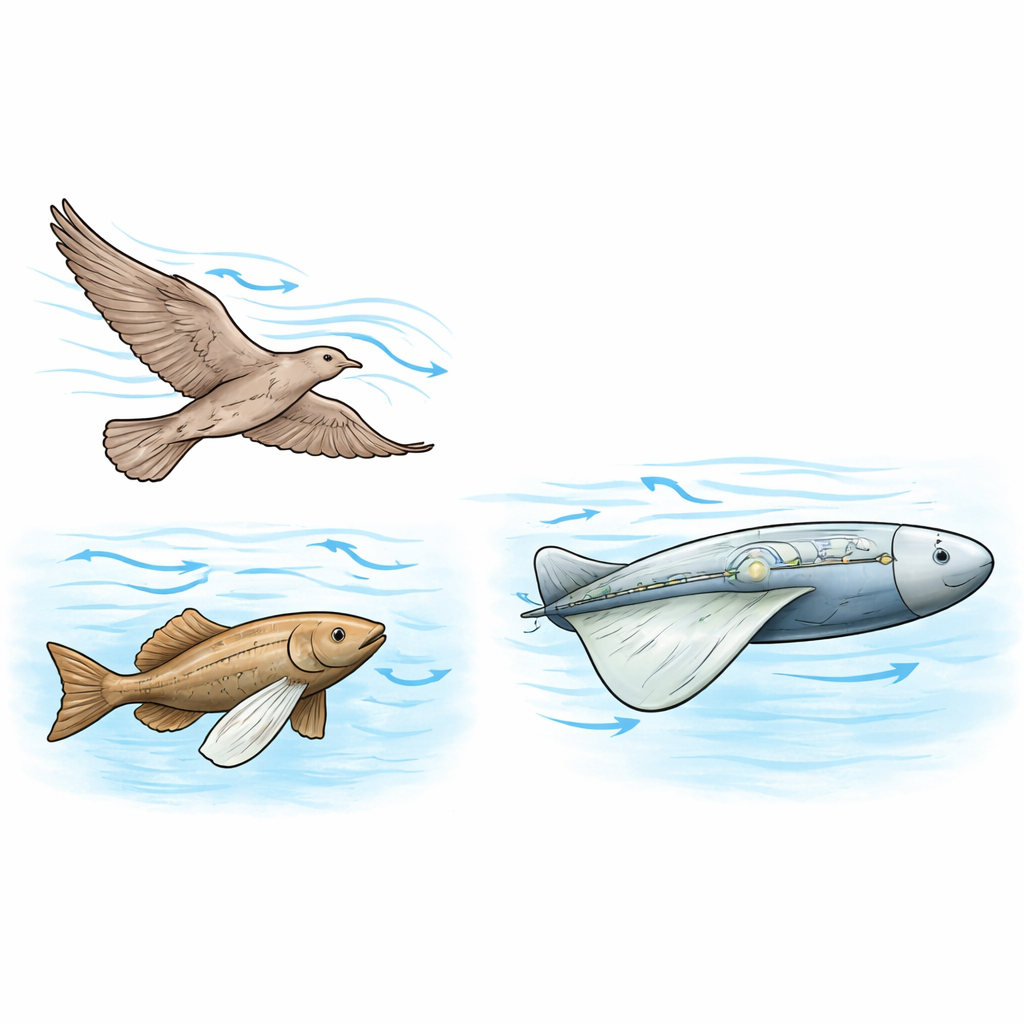
Каждый, кто видел птицу, зависшую в порывистом ветру, или рыбу, удерживающуюся в быстром потоке, наблюдал, как природа решает сложную инженерную задачу: как оставаться на курсе, когда окружающая среда отказывается вести себя предсказуемо. В этом исследовании показано, как новый тип мягкого подводного крыла, оснащённого «чувством собственного тела», напоминающим проприоцепцию у животных, может автоматически ощущать внезапные изменения потока и изменять форму, чтобы сохранять устойчивость. Работа указывает путь к будущим подводным роботам, которые планируют более похоже на животных, а не на жёсткие механизмы, экономя энергию при работе в тяжёлых условиях.
Уроки от птиц и рыб
В природе крылья и плавники не являются жёсткими лопатами: они сгибаются, закручиваются и прогибаются. Птицы чувствуют движение воздуха через крошечные рецепторы в перьях, а рыбы используют чувствительные к давлению клетки вдоль тела и в лучах плавников. Эти встроенные сенсоры позволяют животным ощущать, как деформируются их конечности в движущейся воде или воздухе, и реагировать почти мгновенно, подавляя порывы и турбулентность. Напротив, большинство подводных аппаратов используют жёсткие рулевые поверхности и отдельные приборы для измерения потока, из‑за чего они медлительны и энергоёмки, когда окружающая среда становится хаотичной. Авторы утверждают, что объединение гибкости и сенсинга в одной мягкой конструкции может сократить этот разрыв.
Мягкое крыло с встроенными чувствами
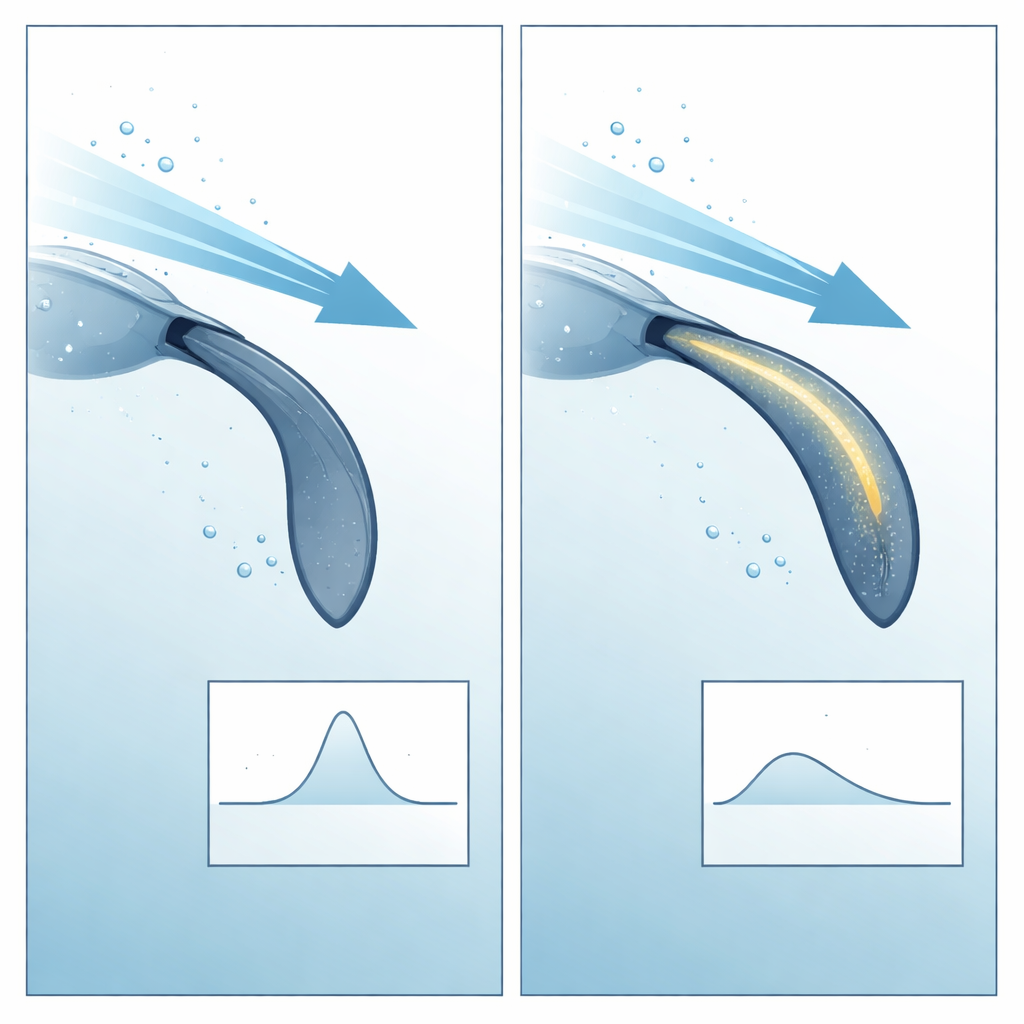
Команда создала полу-крыло для подводного применения, сочетающее мягкий, сгибающийся хвост и жёсткий нос. Внутри мягкой части проходят надувные трубки, заполненные жидкостью, которые можно подкачивать, чтобы изменить кривизну крыла, или его камерность. Снаружи приклеили тонкую электронную «кожу» из силикона с проводами из жидкого металла. При изгибе крыла расстояние между этими скрытыми проводниками меняется, изменяя их электрическую ёмкость. Обучив простую модель машинного обучения соотносить эти сигналы с формой крыла, отслеживаемой камерой, исследователи превратили э-кожу в высокоточный датчик формы. После обучения система может в реальном времени оценивать камерность крыла без внешних камер, даже находясь под водой.
Преобразование формы в управление
С этим проприоцептивным мягким крылом, установленным в водяной трубе, исследователи имитировали порывы как внезапные изменения угла крыла относительно потока. Сначала они показали в установившихся условиях, что, регулируя камерность, можно получать одинаковую подъёмную силу при разных углах обтекания или разные подъёмы при одном и том же угле. Это означает, что когда порыв пытается вывести крыло из равновесия, в пространстве форм существует «путь», возвращающий желаемую подъёмную силу. Затем они запрограммировали идеализированную открыто-цикловую реакцию — зная точно, когда произойдёт порыв, — чтобы накачивать или сдувать внутренние трубки в нужные моменты. В этом наилучшем сценарии изменение камерности снизило падение подъёма во время возмущения примерно с 50% до порядка 10%.
Позволяя крылу реагировать самостоятельно
Более требовательный тест заключался в том, чтобы дать крылу самому решать, когда что‑то не в порядке. Здесь э‑кожа фиксирует характерную «подпись» в сигнале камерности: быстрое переразгибание и колебания, когда мягкое тело сгибается при внезапном изменении потока. Когда появляется этот шаблон, простой контроллер надувает трубки в том направлении, которое с наибольшей вероятностью вернёт подъём к целевому значению, не вычисляя явно поток или силы. Даже такая минималистичная стратегия работает хорошо. По сравнению с эквивалентным жёстким крылом, неактивированное мягкое крыло само по себе сокращает импульс порыва — по сути суммарный толчок во времени — примерно в три раза. При добавлении активного управления общая нежелательная подъёмная импульса сокращается до 87%, достигая и даже превышая способность некоторых птиц справляться с порывами, хотя и в другой среде.
Почему это важно для будущих роботов
Для неспециалиста главный вывод в том, что делая подводных роботов мягче и более осознанными, можно одновременно повысить их живучесть и эффективность. Вместо того чтобы бороться с возмущениями с помощью грубой силы моторов и сложных внешних сенсоров, гибкое тело робота и встраиваемая кожа помогают поглощать и «читать» поток, вызывая умеренные изменения формы, которые держат курс. Хотя это исследование сосредоточено на одном экспериментальном крыле в контролируемой ванне, те же принципы применимы к целым аппаратам или к роботам, плавающим как рыбы. В перспективе такая «воплощённая интеллигентность» может позволить машинам исследовать турбулентные океаны с той же тихой грацией, которую птицы и рыбы уже демонстрируют в воздухе и воде.
Цитирование: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
Ключевые слова: мягкая робототехника, подводные аппараты, биовдохновлённый дизайн, подавление возмущений потока, проприоцептивные датчики