Clear Sky Science · ru
Воплощённое тактильное восприятие свойств мягких объектов
Почему важно учить роботов чувствовать
Представьте робота, который осторожно обследует живот пациента, сортирует спелые фрукты, не помяв их, или собирает хрупкие детали, опираясь исключительно на осязание. Чтобы делать это безопасно, роботам нужно научиться «чувствовать» мягкие объекты богато и по‑человечески. В этой статье описывается, как исследователи создали электронную кожу и новый тип обучающей модели, чтобы роботы лучше определяли мягкость, форму и текстуру поверхности «мягких» предметов — приблизив машины к по-настоящему ловкому прикосновению.
Создание высокотехнологичного чувства осязания
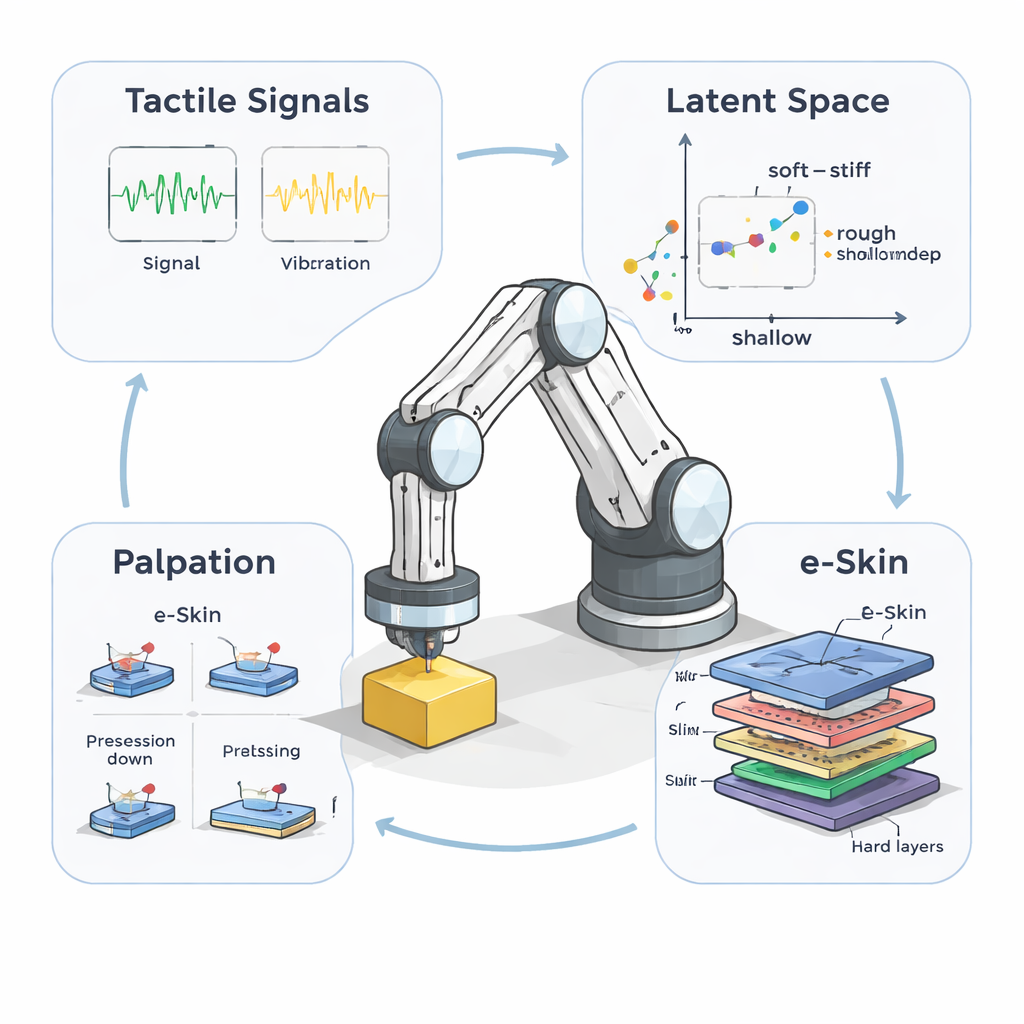
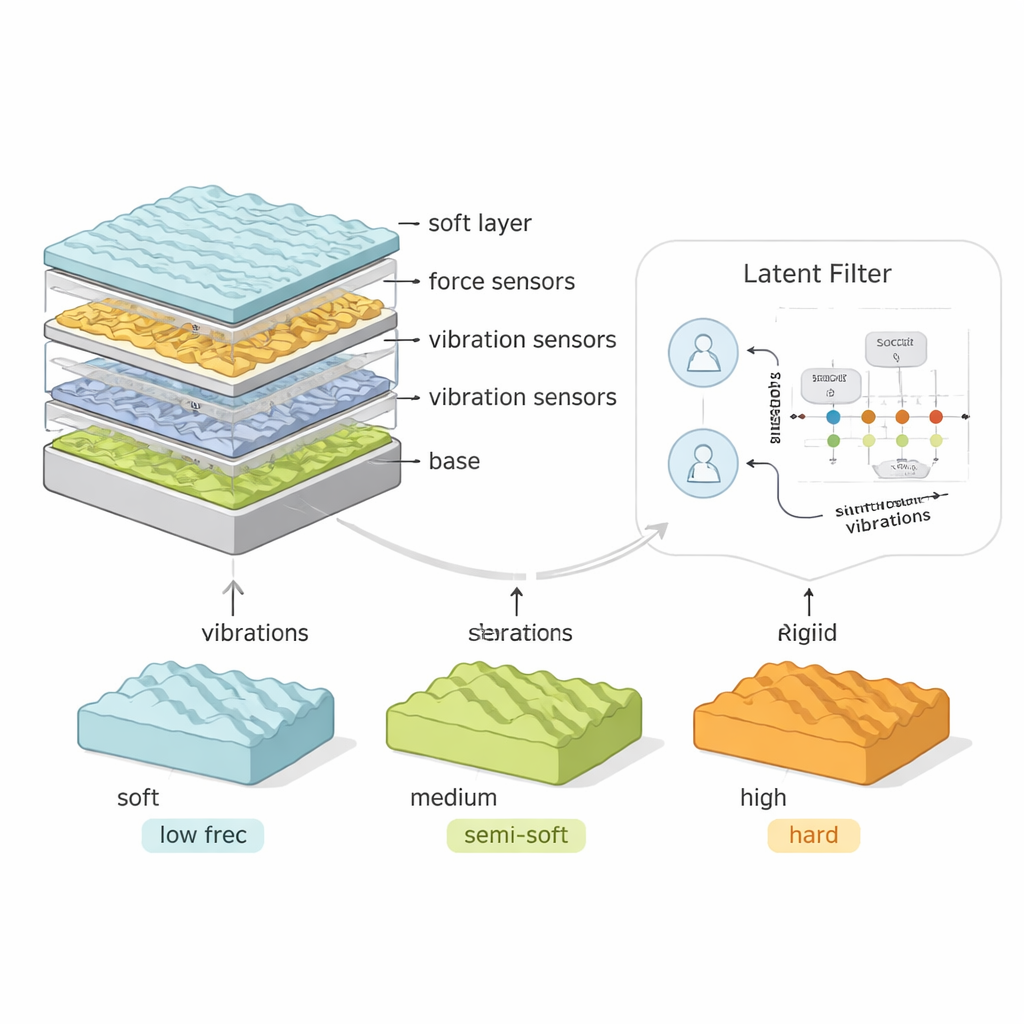
Кожа человека мягкая, слоистая и насыщена разными рецепторами, реагирующими на давление, растяжение и вибрацию. Команда поставила задачу воссоздать эти способности в роботе. Они разработали модульную электронную кожу, или e‑Skin, из уложенных друг на друга силиконовых слоёв с встроенными датчиками. Два слоя содержат плотные сети силовых датчиков, измеряющих, насколько вдавлена кожа в разных точках, а третий слой включает крошечные акселерометры, улавливающие быстрые вибрации, например тот самый гул при проведении пальцем по грубой ткани. Меняя типы силикона, можно было сделать e‑Skin мягче или жестче, а включая и выключая слои датчиков — испытать разные комбинации «органов чувств».
Проектирование мира мягких объектов
Чтобы изучать осязание в контролируемых условиях, исследователям требовалось больше, чем простые резиновые блоки. Они создали библиотеку «волновых объектов» с тщательно настроенными свойствами. Каждый объект имел волнистую верхнюю поверхность, гребни которой могли быть мелкими или высокими (амплитуда) и расположены ближе или дальше друг от друга (пространственная частота), а также отливаться из материалов от очень мягкого силикона до жёсткого пластика. Некоторые образцы содержали тонкий жёсткий слой под мягкой поверхностью, имитируя ткани или материалы, меняющиеся при более глубоком нажатии. Это позволяло команде знать точную мягкость и текстуру каждого объекта, к которому прикасался робот, и сравнивать то, что «чувствовал» робот, с истинными характеристиками.
Обучение роботов исследовать прикосновением
Так же как люди тычут, нажимают и скользят пальцами, чтобы оценить предмет, робот использовал три базовых пальпационных движения. При нажатии он двигался строго вверх‑вниз, чтобы исследовать объёмную мягкость. При пресесии он наклонял и прокатывал e‑Skin, контактируя с несколькими соседними участками и исследуя более сложные формы. При скольжении он двигался поперёк поверхности, чтобы выявить тонкие текстуры и трение. Для каждого объекта робот выполнял эти движения с разной глубиной и скоростью, генерируя тысячи временных сигналов о прикосновении — изменения сил по поверхности кожи и вибрации, распространяющиеся по ней. Эти богатые динамические потоки данных гораздо информативнее, чем одиночный статический укол.
Обнаружение скрытых закономерностей в тактильных данных
Чтобы осмыслить этот поток информации, авторы предложили модель машинного обучения, которую назвали Латентным Фильтром. Вместо того чтобы сразу маркировать объекты, модель учится внутренней «карте», где каждая точка суммирует текущее взаимодействие робота с объектом. Такое латентное пространство устроено так, что одни компоненты быстро реагируют на мгновенные тактильные сигналы, тогда как другие интегрируют информацию медленно с течением времени. Обучив Латентный Фильтр на многих взаимодействиях, команда показала, что эта внутренняя карта естественно выстраивается вдоль значимых физических признаков — шероховатости поверхности, высоты гребешков и жёсткости — хотя модель никогда прямо не получала эти метки. Отдельный шаг регрессии подтвердил, что скрытые признаки могут с хорошей точностью предсказывать истинные механические свойства объекта.
Как кожа, датчики и движение работают вместе
Эксперименты показали, что ни один отдельный слой датчиков или стратегия движения не является лучшей во всех ситуациях. Комбинация вибрационной и силовой информации через подход «позднего слияния» — когда каждый тип сигнала обрабатывается отдельно, а затем объединяется — дала наиболее надёжное понимание мягких объектов. Два силовых слоя помогали системе чувствовать сдвиг и растяжение, что важно для определения жёсткости и скрытой внутренней структуры, тогда как вибрации особенно полезны при скольжении для улавливания тонких текстур. Механическая мягкость самой e‑Skin тоже имела значение: более жёсткие кожи лучше измеряли общую жёсткость и форму, в то время как более мягкие хорошо улавливали едва заметные вариации в упругих или слоистых материалах. Результаты указывают на то, что тактильные системы роботов должны проектироваться совместно: свойства кожи, электроника датчиков и паттерны движения робота должны подбираться вместе.
Что это значит для повседневных роботов
Объединив слоистую, вдохновлённую человеком e‑Skin с мощной моделью обучения, учитывающей роль действия, это исследование показывает, как роботы могут приобрести более глубокое чувство осязания. Вместо того чтобы полагаться лишь на камеры или простые пороги силы, будущие машины смогут ощущать, как объект поддаётся, вибрирует и меняется при исследовании, а затем оперативно корректировать захват или движение. Такие возможности важны для задач вроде медицинской пальпации, обращения с мягкой едой и манипуляции деформируемыми предметами в домах и на производствах. Проще говоря, исследование демонстрирует: чтобы прикасаться к миру так же эффективно, как мы, роботам нужны не только хорошие датчики, но и подходящее «тело», правильные способы движения и умный способ связывать всю эту информацию в цельное представление о том, что они чувствуют.
Цитирование: Dutta, A., WM Devillard, A., Zhang, Z. et al. Embodied tactile perception of soft objects properties. npj Robot 4, 15 (2026). https://doi.org/10.1038/s44182-026-00077-0
Ключевые слова: роботизированное прикосновение, электронная кожа, сенсорика мягких объектов, тактильное восприятие, воплощённая робототехника