Clear Sky Science · ru
Дешевый 3D-печатный миниатюрный роботизированный захват с интегрированной камерой для вычисления сил и моментов на основе зрения
Почему важны крошечные мягкие захваты
Роботы становятся меньше и берут на себя более тонкие задачи — от сборки крошечных шестерёнок до аккуратного сбора ягод, не раздавив их. Но большинство «рук» роботов всё ещё сжимают вслепую, слабо представляя, с какой силой они давят. В статье представлен недорогой миниатюрный захват, напечатанный на 3D‑принтере и прозванный «Seezer», который может бережно захватывать хрупкие объекты и «чувствовать» силы с помощью маленькой камеры внутри кончиков пальцев вместо дорогих силовых датчиков.
Нежная рука, которая видит
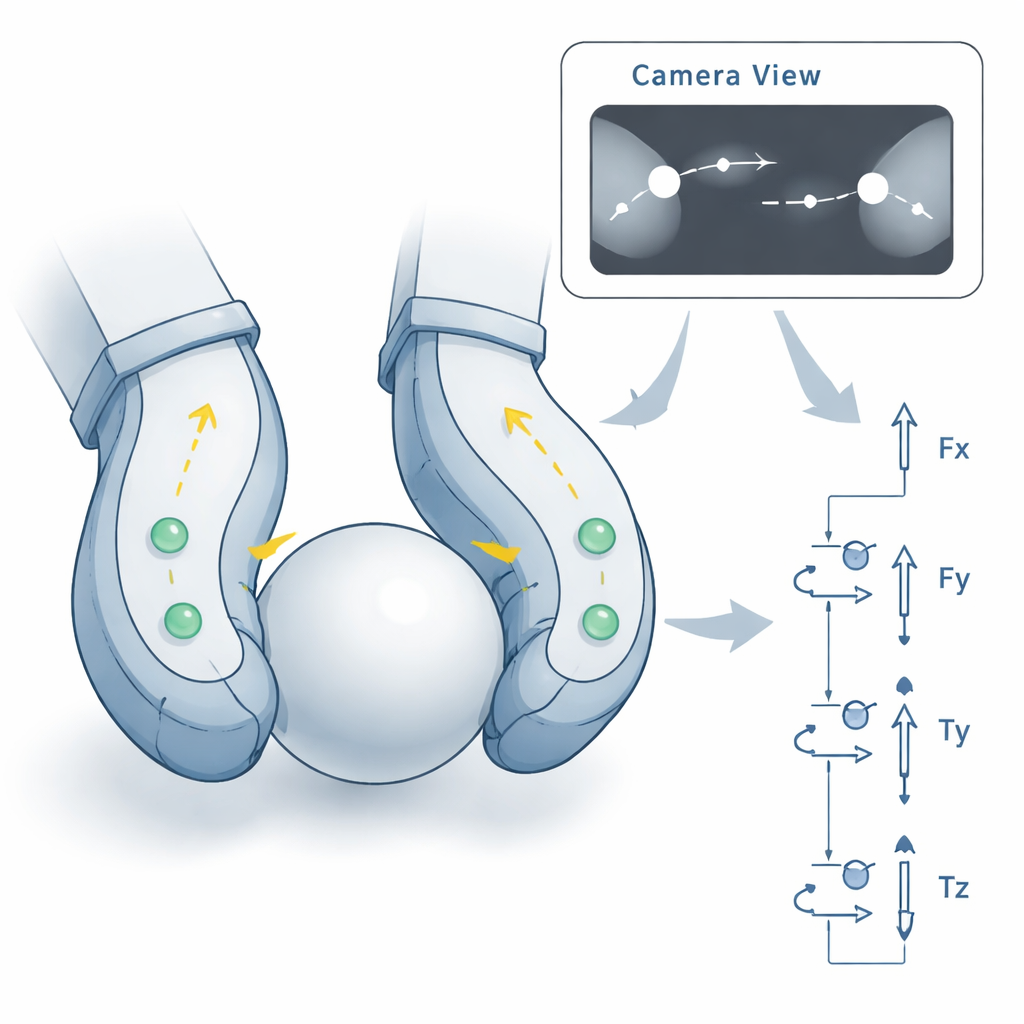
Seezer — это мягкий комплаентный роботизированный захват, чьи пальцы гнутся, а не шарнириваются, как металлические клещи. Ключевая идея — печатать почти всё единым целым на потребительском 3D‑принтере: монолитный элемент пальца, включающий гибкие сочленения, формы кончиков, адаптированные под задачу, и небольшие встроенные метки. Такой одноразовый модуль пальца насаживается на компактный моторный блок, в котором размещены миниатюрная камера и подсветка. По мере вращения червячной пары мотором гибкие сочленения сгибаются, пальцы закрываются вокруг объекта, а камера наблюдает за кончиками пальцев и пространством перед захватом.

Считывание силы по изгибу пальца
Вместо того чтобы встраивать провода, тензодатчики или чувствительные площадки в пальцы, Seezer наносит внутри визуально насыщенные подсказки. Каждый кончик пальца несёт небольшие круглые «фидуциальные» метки, чьи положения в изображении камеры изменяются при деформации пальца. Программа сначала обнаруживает и отслеживает эти метки в каждом кадре. Затем, на основе короткой калибровочной последовательности, простые математические модели учатся сопоставлять смещения меток с действительными силами сжатия и растяжения на каждом кончике. Комбинируя три силы от кончиков с базовой физикой, система оценивает общие силы и моменты, действующие на захват во всех шести степенях свободы, а также силу сжатия между пальцами.
Насколько хорошо он «ощущает» силы
Чтобы проверить точность этого камерного измерения, авторы сопоставили оценки Seezer с показаниями высокоточного коммерческого датчика силы/момента в контролируемой лабораторной установке. С одной версией конструкции пальца (более жёсткие кончики) захват измерял силы сжатия до ~1,1 ньютон с типичными погрешностями от 8% до 17%, а полные шестидосяные силы и моменты — с ошибками в основном от 8% до 24%. Более мягкая версия кончика отказалась от максимальной силы в пользу чувствительности: она генерировала меньшие силы, но процентные ошибки оставались сопоставимыми. Важно, что моделям требовалось всего 31–141 калибровочная точка — существенно меньше, чем тысячи изображений, часто необходимых методам глубокого обучения, работающим с целыми кадрами камеры.
От крошечных шестерёнок до мягких ягод
Две демонстрационные задачи показывают, что этот захват способен делать в реальных условиях. В одной из них Seezer многократно снимал с оси небольшие 3D‑печатные шестерёнки, перемещал их и возвращал на место, используя внутреннюю камеру как для выравнивания шпонки шестерни по оси, так и для мониторинга движения пальцев — имитация тонкой сборки в стеснённых пространствах. В другой задаче захват собирал смородину с гроздей: система в реальном времени отслеживала оценённую силу сжатия и прекращала закрытие при достижении заранее заданного порога, чтобы ягодка была сорвана, но не раздавлена. Обе демонстрации работали на недорогой электронике и показали, что одна конструкция справляется с жёсткими и мягкими объектами размером в несколько миллиметров.
Проблемы и возможные применения
Seezer пока остаётся доказательством концепции и имеет ограничения. Отслеживание меток работает лучше в стабильных, хорошо освещённых сценах с некладущимся фоном; изменение освещения, блестящие поверхности и сложные движения могут вызывать ошибки трекинга. Сравнительно невысокая частота кадров камеры также ограничивает скорость реакции системы для жёсткого управления силой или богатой тактильной обратной связи. Материалы пальцев со временем могут уставать или менять свои свойства, а команда ещё не провела систематические испытания длительной долговечности. Авторы утверждают, что более надёжные алгоритмы трекинга или сочетание их аппаратуры с современными методами глубокого обучения для оценки сил могут повысить точность и надёжность; развитие 3D‑печати позволит дальнейшую миниатюризацию и производство стерилизуемых одноразовых пальцев для хирургии или лабораторных приложений.
Что это значит для повседневной робототехники
Проще говоря, работа демонстрирует, что небольшая дешевая роботизированная «рука» может одновременно видеть и чувствовать, наблюдая, как её мягкие пальцы изгибаются. Имея лишь умеренное количество калибровочных данных и доступные компоненты, Seezer оценивает силу сжатия и направление контактных сил и моментов с точностью, достаточной для деликатных операций. При повышении надёжности такой подход может помочь будущим роботам обращаться с мелкими хрупкими объектами — медицинскими устройствами, электроникой, фруктами или даже тканями при минимально инвазивных операциях — без громоздких датчиков или сложной аппаратуры, принося чувствительный «осязательный» контроль в места, где важны пространство и стоимость.
Цитирование: Duverney, C., Gerig, N., Hüls, D. et al. Affordable 3D-printed miniature robotic gripper with integrated camera for vision-based force and torque sensing. npj Robot 4, 10 (2026). https://doi.org/10.1038/s44182-026-00075-2
Ключевые слова: мягкий роботизированный захват, визуальное измерение силы, 3D-печатная робототехника, миниатюрная манипуляция, тактильная обратная связь