Clear Sky Science · ru
Развитие мягкой робототехники: последние достижения в диэлектрических эластомерах и жидкостных актуаторах
Мягкие роботы, которые двигаются больше как мышцы
Представьте робота, который может безопасно обнять ребенка, протиснуться сквозь завалы в обрушившемся здании или аккуратно массировать слабое сердце. Для таких задач машины должны сгибаться и растягиваться подобно живой ткани, а не лязгать, как металл. В этом обзорном материале объясняется, как новый класс «мягких» электрических мышц — изготовленных из резиноподобных твердых и жидких материалов — приближает эту мечту к реальности и какие проблемы остаются, прежде чем они покинут лабораторию и появятся в повседневной жизни.
От жестких моторов к мягким электрическим мышцам
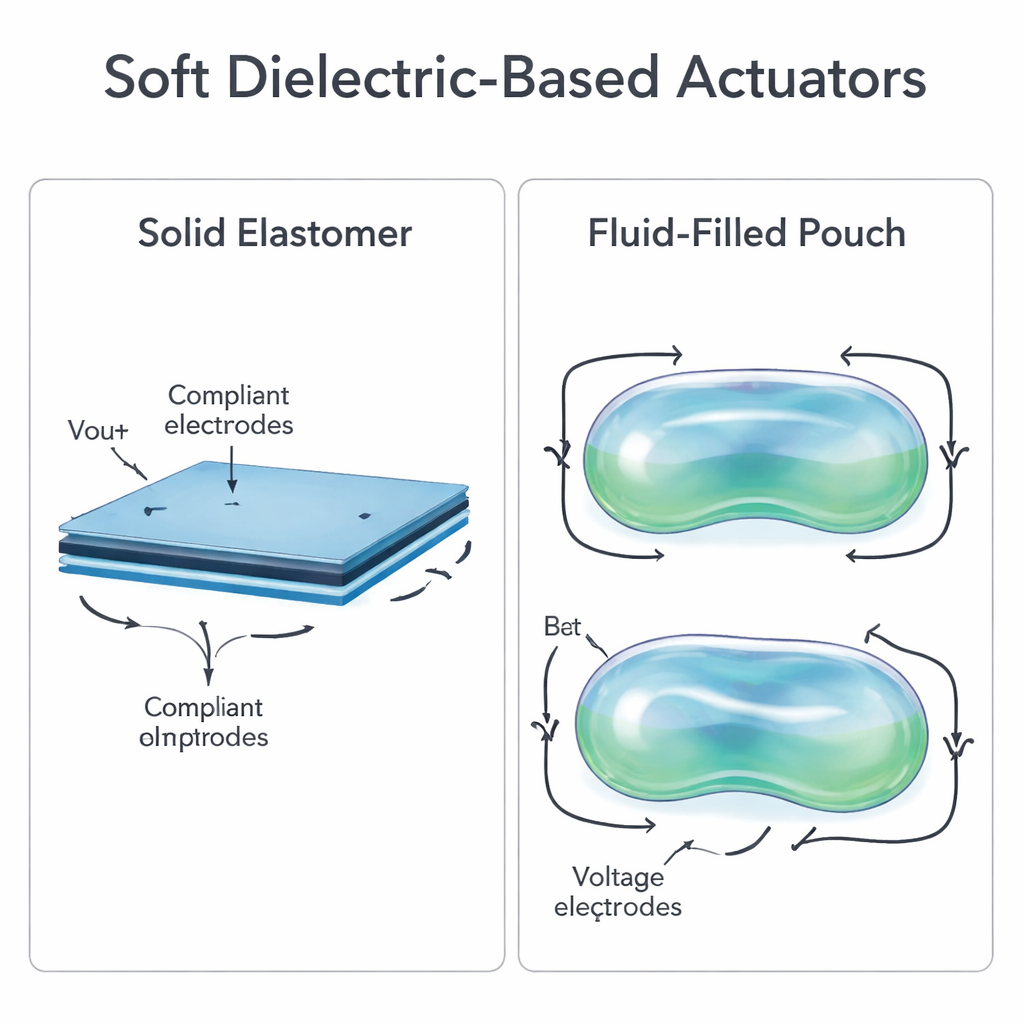
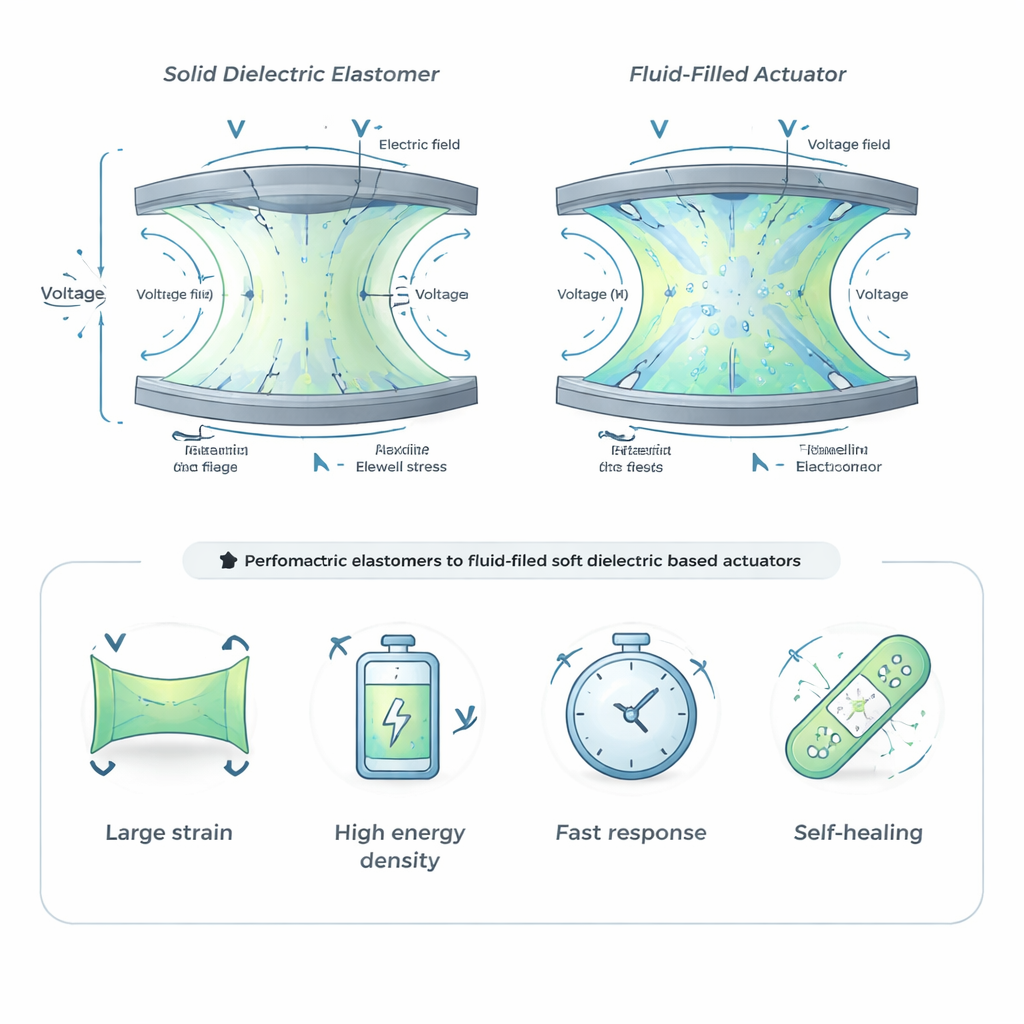
Большинство промышленных роботов полагаются на тяжелые, жесткие двигатели и передачи. Они мощные и точные, но также дорогие, хрупкие и потенциально опасные рядом с людьми. Мягкие роботы, сделанные из тягучих материалов, похожих на силиконовую посуду или резинки, жертвуют грубой силой ради мягкости, адаптивности и живучести. В центре внимания этой статьи — мягкие актуаторы, приводимые в движение электричеством: диэлектрические эластомерные актуаторы (DEA), использующие слой твердой резины, и диэлектрические жидкостные актуаторы (DFA), в которых электрически изолирующая жидкость запечатана в гибком мешочке. В обоих случаях приложенное напряжение между двумя податливыми электродами сжимает материал за счет электростатических сил и напрямую превращает электрическую энергию в движение с большими деформациями, высокой плотностью энергии и быстрым откликом.
Как материалы заставляют работать мышцы
Чтобы функционировать как полезные мышцы, этим устройствам нужны весьма специфические материалы. Для DEA центральный резиновый лист должен быть чрезвычайно мягким, чтобы легко растягиваться, но при этом выдерживать высокие электрические поля без разрывов или пробоев. Исследователи настраивают этот баланс двумя основными стратегиями. Одна — разработка новых полимеров — от акрилатов, силиконов и полиуретанов до более экзотических блок-сополимеров — которые содержат много полярных химических групп (повышающих электрическую реактивность) в гибких сетях с низкой жесткостью. Другая — создание композитов путем введения микрочастиц или жидкостей, повышающих способность материала аккумулировать электрическую энергию. Аналогичные принципы применимы к DFA: инженеры подбирают масла и другие диэлектрические жидкости с нужной вязкостью, стабильностью и совместимостью с тонкими пластиковыми или силиконовыми оболочками, чтобы напряжение могло быстро перемещать жидкость, создавая выпуклости, ходы и вибрации без протечек или химического разрушения.
Создание и приведение в действие мягких актуаторов в масштабе
Преобразование этих продуманных материалов в надежные устройства — это отдельная инженерная задача. Традиционное производство часто включает трудоемкие ручные операции: натяжение тонких пленок на рамах, нанесение или печать мягких электродов, укладка слоев и — в случае DFA — заполнение жидкостью и запечатывание мешка. В статье обзорно рассматриваются новые пути изготовления, такие как струйная и трафаретная печать, экструдирование волоконообразных «мышц» и многоматериальная 3D‑печать, способная наносить электроды и диэлектрики за один проход. Также объясняется, как разные формы приводят к разным движениям: плоские участки, расширяющиеся в площади, купола, которые выбрасываются вверх, свернутые цилиндры, сокращающиеся по длине, и конструкции, изгибающиеся или вибрирующие. Поскольку эти материалы могут стареть, протекать или выходить из строя в результате электрического пробоя, авторы суммируют исследования по долговечности и типичные режимы отказа, а также отмечают стремление к дизайнам с самозаживлением, способным восстановиться после искры или прокола.
Более умное управление и появляющиеся применения
Как и природные мышцы, мягкие актуаторы требуют управления. Простые схемы с открытым циклом лишь подают заданный профиль напряжения, но он может дрейфовать по мере нагрева или ползучести материала. Более продвинутые подходы встраивают датчики — или используют собственные электрические сигналы актуатора — для измерения деформации, силы или вибрации в реальном времени и корректировки управляющего сигнала. Исследователи сейчас экспериментируют с контроллерами на основе машинного обучения и обучения с подкреплением, которые способны справляться с нелинейным, зависящим от предыстории поведением мягких материалов. В прикладной части статья обозревает широкий спектр: искусственные мышцы, поднимающие многократно превышающий их собственный вес, роботы, плавающие или летающие наподобие рыб и насекомых, носимые гаптические ленты и накладки на кончики пальцев для реалистальной тактильной обратной связи, зум‑объективы и светоформирующие «кожи», вдохновленные кальмарами и человеческим глазом, поверхности с изменяемой формой и концептуальные медицинские устройства, которые однажды могли бы помочь слабым сердцам или парализованным лицам.
Что по‑прежнему мешает лабораторным демонстрациям стать реальными роботами
Несмотря на обещания, эти электрические мышцы по‑прежнему сталкиваются с препятствиями, прежде чем смогут безопасно приводить в движение помощников по дому, медицинские импланты или массовые носимые устройства. Многие требуют управляющих напряжений уровня киловольт, что осложняет безопасность и электронику. Материалы, прекрасно проявляющие себя в коротких тестах, могут закостенеть, высохнуть или выйти из строя после миллионов циклов. Технологии изготовления зачастую слишком медленные и непоследовательные для крупномасштабного производства. И большинство современных полимеров по‑прежнему трудно переработать или биоразложить. Авторы утверждают, что прогресс будет зависеть от совместного проектирования на разных уровнях: новых мягких материалов, сочетающих низкую жесткость, высокую электрическую реактивность, надежность и даже самозаживление; автоматизированных, управляемых данными процессов производства и испытаний; и систем управления, использующих встроенное сенсорное обеспечение и легкие ИИ‑алгоритмы. Вместе эти достижения могут дать роботам будущего мышцы, которые будут не только сильными и быстрыми, но и безопасными, адаптивными и устойчивыми.
Цитирование: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
Ключевые слова: мягкая робототехника, диэлектрические эластомерные актуаторы, диэлектрические жидкостные актуаторы, искусственные мышцы, гаптические интерфейсы