Clear Sky Science · ru
Предиктивное управление в игровой модели для персонализированной и целевой интерактивной помощи
Роботы, которые ощущаются как хорошие партнёры по тренировке
Представьте себе партнёра по тренировке или физиотерапевта, который всегда знает, когда помочь вам поднять нагрузку, когда позволить вам немного помучиться и с какой силой вы планируете двигаться дальше. В этой статье показано, как дать контактным роботам — например, экзоскелетам, используемым в реабилитации или на производстве — похожую интуицию. Математически «угадывая», как человек намерен двигаться в ближайшую секунду-две, робот может плавно разделять усилия, снижать усталость и тонко направлять движения и обучение человека.
Почему трудно делить усилия с роботами
Когда робот физически связан с человеком — помогая ему двигать конечностью или нести тяжесть — оба постоянно толкают и реагируют друг на друга. Традиционные контроллеры роботов в основном игнорируют планы человека; они просто преследуют цели по точности или экономии энергии. Это может сделать робота либо слишком жёстким и командующим, либо слишком пассивным и бесполезным. Настоящие человеческие партнёры ведут себя лучше: они чувствуют, как двигается другой, адаптируются к его возможностям и поощряют разные модели поведения — от расслабления до интенсивного усилия. Авторы утверждают, что чтобы приблизить роботов к такому взаимодействию, робот должен явно моделировать, как человек планирует движения и сколько усилий готов вложить.
Теоретико-игровой взгляд на взаимодействие человека и робота
Исследователи опираются на теорию игр — математику стратегического взаимодействия — рассматривая человека и робота как двух «игроков», выполняющих одну задачу. У каждого свои цели: человек хочет отслеживать желаемое движение, затрачивая как можно меньше усилий, а робот хочет помочь в отслеживании, одновременно снижая нагрузку на человека. Важно то, что оба предполагаются дальновидными лишь на короткий срок — в пределах окон планирования примерно в одну-две секунды, что отражает естественный способ планирования движений человеком. Внутри этого окна команда выводит компактную формулу равновесия Нэша: уравновешенный паттерн сил, при котором ни человек, ни робот не могут улучшить свой результат без изменения стратегии другого. Это равновесие определяет, сколько каждый должен прилагать силы в каждый момент.
Обучение робота распознавать намерения человека
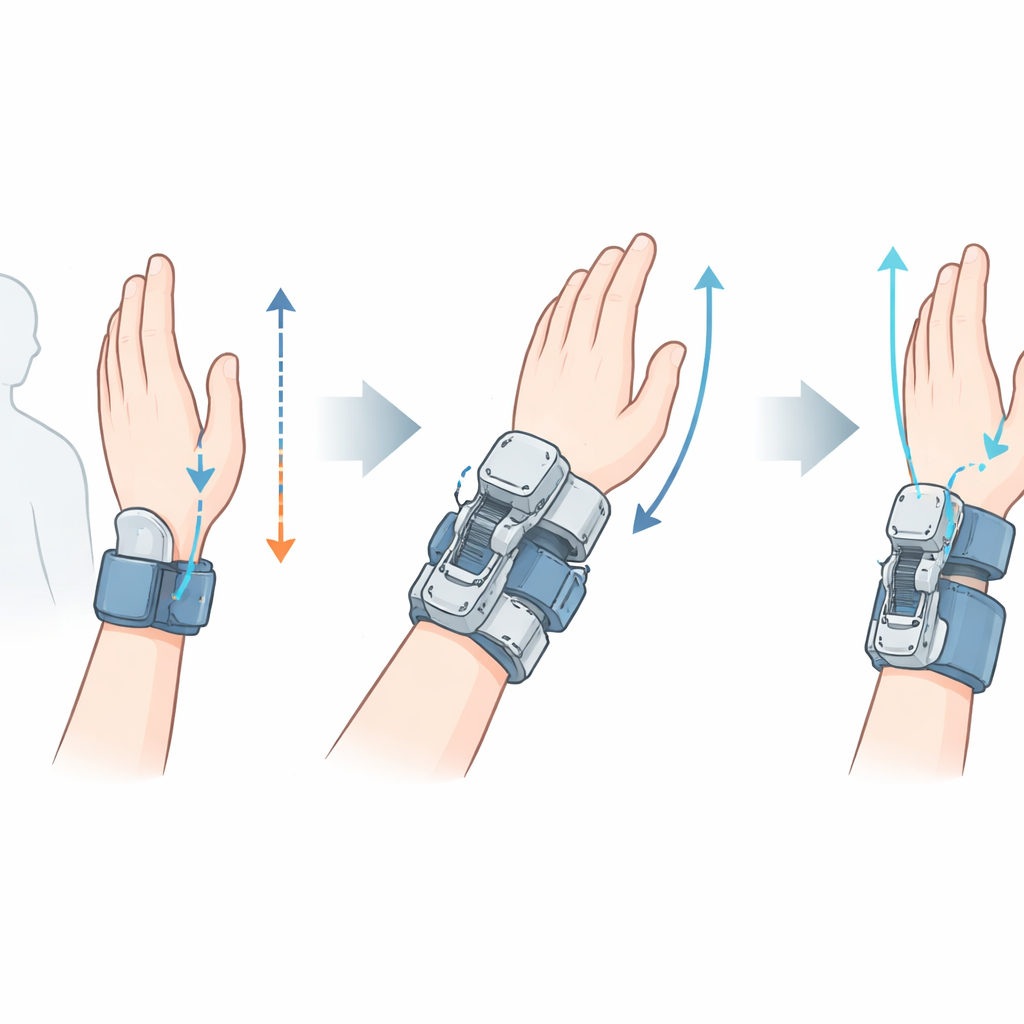
Чтобы играть в эту «игру движений», робот сначала должен вывести, насколько человек ценит точность по сравнению с усилием — скрытое предпочтение, которое варьируется от человека к человеку и даже во времени. Авторы решают это с помощью обратной игровой постановки. Пока человек двигается, датчики измеряют угол сустава и создаваемый крутящий момент. Контроллер затем многократно ищет набор человеческих предпочтений, который наилучшим образом объясняет недавнюю историю движений и сил. Имея эти предпочтения, он предсказывает, как человек, вероятно, будет действовать в ближайшем горизонте, и вычисляет оптимальную вспомогательную силу робота. Всё это работает в реальном времени на запястном экзоскелете, помогающем испытуемым отслеживать движущуюся цель рукой.
Люди и роботы учатся координироваться
Команда проверила свой контроллер на тридцати здоровых взрослых в трёх экспериментах. В первом участников просили переключаться между активным следованием за целью и пассивным состоянием. Контроллер быстро корректировал свою внутреннюю оценку того, насколько человек ценит точность: она росла в активные фазы и падала почти до нуля, когда тот расслаблялся. Во втором эксперименте участники чередовали испытания с помощью робота и без него. С новым контроллером робот сократил усилия в суставах и активность мышц человека, одновременно улучшив точность отслеживания. При повторных испытаниях модель взаимодействия каждого человека устойчиво сходилась к индивидуальному «равновесию», и корреляция между силами человека и робота увеличивалась — признак растущего взаимопонимания. В третьем эксперименте исследователи ввели одну ручку помощи — мета-параметр, который сдвигает, насколько сильно робот стремится минимизировать усилия человека. Поворачивая эту ручку, плавно изменяли и вклад, который люди выбирали вносить, без ухудшения выполнения задачи.
Направление поведения одной ручкой
Мета-параметр помощи позволяет дизайнерам охватить спектр стилей взаимодействия одним регулятором: от почти отсутствия помощи, через равное разделение нагрузки, до почти полной поддержки, когда робот ведёт, а человек может расслабиться. При промежуточных настройках люди, как правило, лучше координировались с роботом, каждый неся примерно половину нагрузки. Паттерн выведенных человеческих предпочтений оставался последовательным для каждого человека при разных уровнях помощи — за исключением ситуаций, когда робот делал почти всё; тогда поведение выравнивалось, потому что люди почти переставали участвовать. Это показывает, что робот может как выявлять индивидуальные стили контроля, так и мягко их корректировать, например прося пользователей делать больше в одной фазе тренировки и меньше в другой.
Что это значит для реабилитации и работы
Для неспециалиста ключевая мысль в том, что этот контроллер заставляет роботов действовать скорее как умные партнёры, чем как жёсткие машины. Предсказывая наши намерения и подстраивая степень помощи, роботы могут снижать наши усилия, когда это нужно, поощрять нас работать больше, когда это полезно, и поддерживать точность и стабильность движений. Та же математическая структура может быть настроена для реабилитации — постепенно перераспределяя усилия от робота к пациенту — или для совместного производства, где люди и роботы безопасно и эффективно разделяют нагрузки. По сути, исследование показывает, что люди естественно адаптируются к роботу, который «играет ту же игру», что и они, открывая путь к более персонализированной и целевой интерактивной помощи.
Цитирование: Hafs, A., Farr, A., Verdel, D. et al. Model predictive game control for personalized and targeted interactive assistance. Commun Eng 5, 57 (2026). https://doi.org/10.1038/s44172-026-00605-8
Ключевые слова: взаимодействие человека и робота, помощь экзоскелета, теория игр в управлении, моторная реабилитация, разделённое управление