Clear Sky Science · ru
Реальное акустическое захватывание в переменных многослойных средах при помощи машинного обучения в направлении управления микропузырьками под контролем МРТ
Навигация крошечных носителей лекарств с помощью звука и снимков
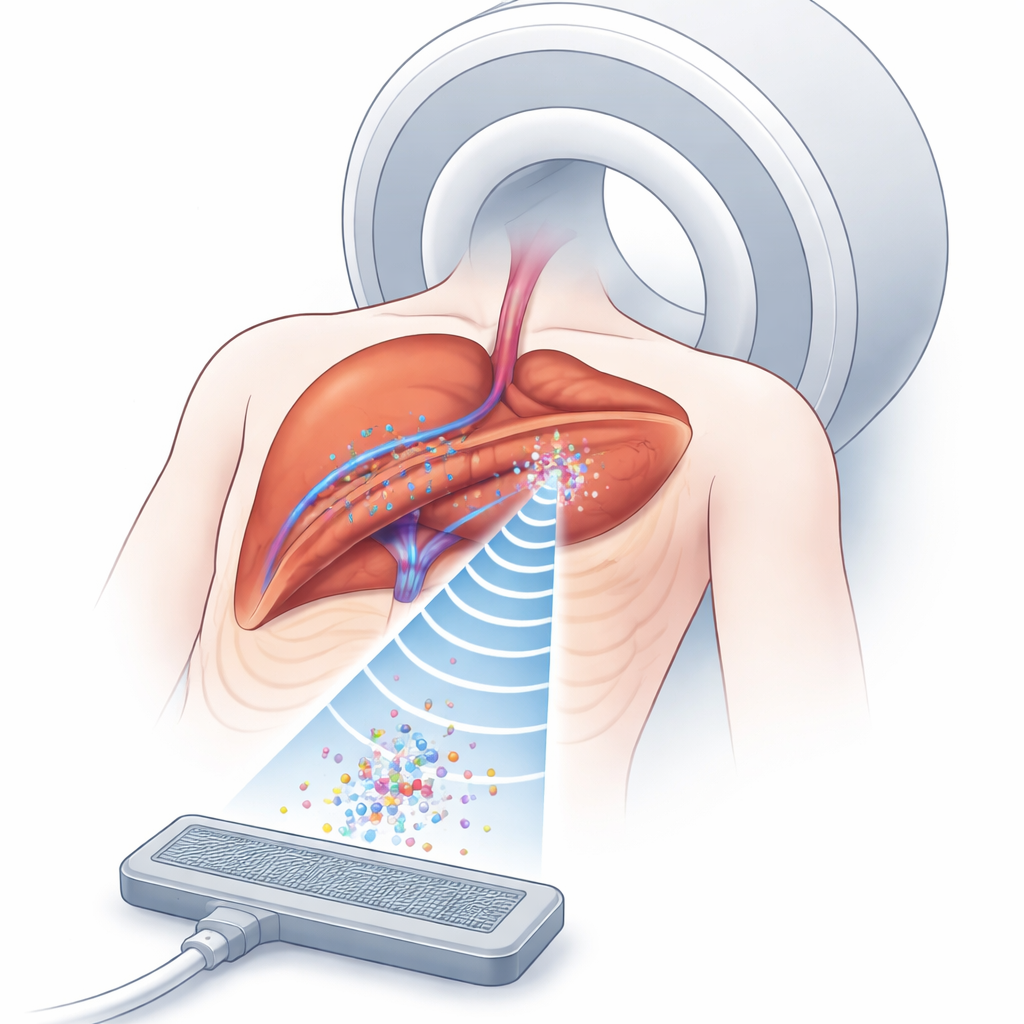
Современные методы лечения рака всё чаще опираются на «умные» носители лекарств, которые доставляют препарат прямо в опухоль, минимизируя повреждение здоровых тканей. В этой работе исследуется футуристический способ управления такими носителями в организме с помощью ультразвуковых «ловушек», управляемых магнитно-резонансной томографией (МРТ). Объединив звуковые волны, медицинскую визуализацию и машинное обучение, авторы стремятся удерживать микроскопические пузырьки с лекарством вблизи подвижных опухолей, даже когда тело смещается при дыхании.
Почему важно захватывать микропузырьки
Микропузырьки-носители проходят по кровеносным сосудам и могут высвобождать груз при активации ультразвуком. Проблема в том, чтобы удержать достаточное количество таких пузырьков в нужном месте и достаточно долго, глубоко внутри тела. Ультразвук способен создавать невидимые области сил — акустические ловушки, которые удерживают мелкие объекты в жидкости без контакта. МРТ, в свою очередь, видит и ткани, и распределение эффектов ультразвука даже внутри органов. Сочетание этих двух инструментов позволяет точнее концентрировать носители лекарств вокруг опухолей, чем при использовании только препаратов. Но в реальных условиях ткани разного типа — жир, мышцы, органы и движущиеся лёгкие — преломляют и искажают звуковые волны, что затрудняет формирование и поддержание стабильной ловушки в точном месте опухоли.
Проблема подвижного многослойного тела
В простых средах, таких как воздух или вода, инженеры уже умеют с помощью фазированных решёток из ультразвуковых излучателей толкать, тянуть и вращать крошечные объекты. Внутри тела звук проходит через несколько слоёв с разной плотностью и скоростью, а границы между ними вызывают преломление и искажение. Традиционные вычислительные методы в принципе могут учесть это, рассчитывая время распространения звука от каждого излучателя до точки назначения. Но такие подходы разбивают тело на миллионы маленьких ячеек и моделируют распространение волн через каждую — чрезвычайно трудоёмкий процесс, который работает только если ткани остаются почти неподвижными. Одно лишь дыхание может смещать органы на несколько миллиметров, быстро делая заранее рассчитанное решение неактуальным.
Обучение модели предсказывать пути звука
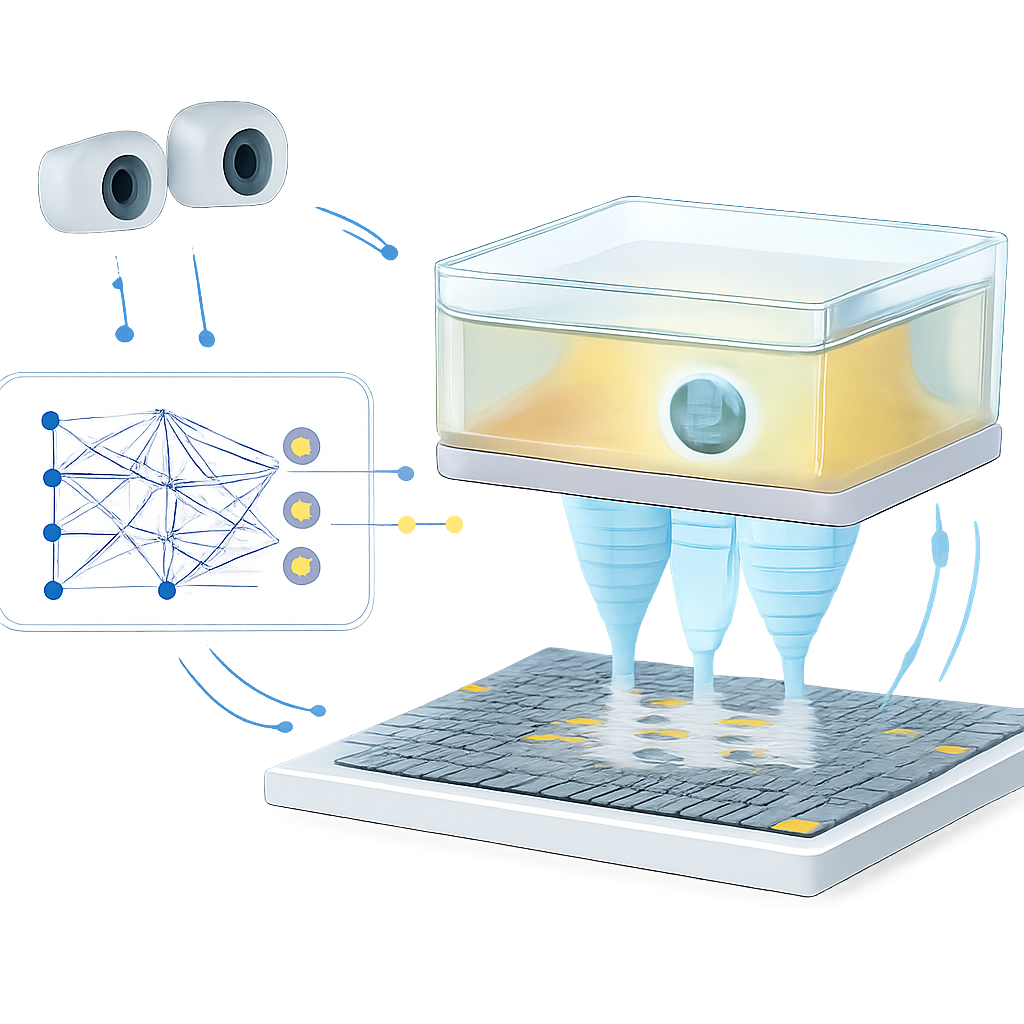
Авторы решают эту проблему с помощью модели на базе обучения, которая служит быстрым сокращением пути: вместо того чтобы каждый раз моделировать волны, они обучают нейросеть предсказывать, сколько времени потребуется каждому ультразвуковому импульсу, чтобы достичь целевой точки. Сначала они строят детализированную виртуальную среду с камерой, заполненной газом и отделённой от воздуха тонкой пластиковой плёнкой, имитируя прохождение звука через разные слои тканей. С помощью физического симулятора генерируют обучающую выборку времен прохождения звука между множеством целей и ультразвуковой решёткой 14×14. Камеру также сдвигают в двух направлениях, чтобы имитировать движение, а её положение описывают по трём визуальным маркерам, аналогичным будущим МРТ-видимым маркерам для отслеживания дыхания пациента. Обученная сеть научилась напрямую сопоставлять желаемую позицию ловушки и положение камеры с нужной временной схемой для всех 196 излучателей, достигая точности в микросекундном диапазоне всего за примерно 26 миллисекунд.
Замыкание петли с помощью зрения и быстрых обновлений
Сама по себе скорость недостаточна: ловушка должна адаптироваться при внезапных изменениях среды. Чтобы продемонстрировать это, команда создала систему управления с обратной связью. Стереокамеры следят за небольшой полистирольной капсулой, удерживаемой акустической ловушкой внутри движущейся камеры. Когда капсула отклоняется от цели больше заданного порога, система корректирует позицию цели, передаёт обновлённые координаты и позу камеры в модель и быстро обновляет фазовый паттерн, управляющий решёткой. В экспериментах система способна обновлять фазовый паттерн до 15 раз в секунду, направляя капсулу по траекториям в форме H, K и U с примерно 1 миллиметром средней ошибки — сопоставимо с точностью позиционирования некоторых клинических систем сфокусированного ультразвука. Тот же принцип обратной связи сокращает время, в течение которого капсула выходит из заданного положения при движении камеры, показывая, что контур управления может компенсировать движения и немоделируемые эффекты от пластиковой плёнки и поддерживающей конструкции.
Что это означает для будущих методов лечения
Для неспециалиста основное послание таково: исследователи создали некую дистанционно управляемую безконтактную «тяговую волну», которая потенциально сможет парковать пузырьки с лекарством у опухоли и удерживать их там, даже когда пациент дышит. Их модель машинного обучения заменяет тяжёлые симуляции быстрым предиктором, а камеры (а в будущем — МРТ-маркеры) сообщают системе, как движется тело, чтобы ловушку можно было оперативно перенастроить. Хотя текущее исследование использует воздух, газы и пластик вместо настоящих тканей и левитирует пластиковую капсулу вместо реальных микропузырьков, оно демонстрирует управление в реальном времени в подвижной многослойной среде. При более мощном оборудовании, более высоких частотах ультразвука и отслеживании движений с помощью МРТ этот подход может развиться в клинический инструмент для МРТ-наведённой, роботизированной ультразвуковой терапии, которая будет доставлять лекарства точнее и безопаснее глубоко внутри тела.
Цитирование: Wu, M., Li, X. & Tang, T. Machine learning-facilitated real-time acoustic trapping in time-varying multi-medium environments toward magnetic resonance imaging-guided microbubble manipulation. Commun Eng 5, 52 (2026). https://doi.org/10.1038/s44172-026-00600-z
Ключевые слова: акустическое захватывание, терапия под контролем МРТ, доставка лекарств с помощью микропузырьков, машинное обучение в ультразвуке, неинвазивное роботизированное манипулирование