Clear Sky Science · ru
Синтетическое отслеживание и управление миниатюрными медицинскими устройствами с помощью рентгена
Меньше инструментов — безопаснее операции
Хирурги начинают использовать крошечные беспроводные медицинские инструменты, которые могут ползать по сосудам и другим узким путям, доставлять лекарства, расширять закупоренные артерии или измерять жизненно важные сигналы внутри тела. Эти миниатюрные устройства обещают более щадящие вмешательства и более быстрое восстановление — но только если врачи смогут видеть и управлять ими в реальном времени. В статье представлен MicroSyn-X, новый метод обучения компьютеров отслеживанию таких устройств на рентгеновских изображениях, что приближает более точные и менее инвазивные операции.
Проблема невидимых помощников
Сегодняшний рабочий инструмент в хирургии — рентгеновская флюороскопия, которая показывает движущиеся тени костей, сосудов и инструментов на экране. Однако миниатюрные устройства настолько малы и слабо контрастны, что часто сливаются с шумным фоном. Их может скрывать кость, металлические инструменты или контрастные вещества, а мягкие или жидкие роботы постоянно меняют форму при движении. Люди вынуждены внимательно следить за экраном и вручную корректировать магниты или катетеры — это медленный и утомительный процесс, подверженный ошибкам. Обучение компьютерного зрения — программ, которые могут «видеть» сами — могло бы помочь, но обычно требует огромных наборов тщательно размеченных изображений. Для этих новых устройств такие датасеты практически отсутствуют, потому что их сбор дорог, занимает много времени и ограничен требованиями к конфиденциальности пациентов.
Обучение компьютеров на поддельных, но правдоподобных рентгенах
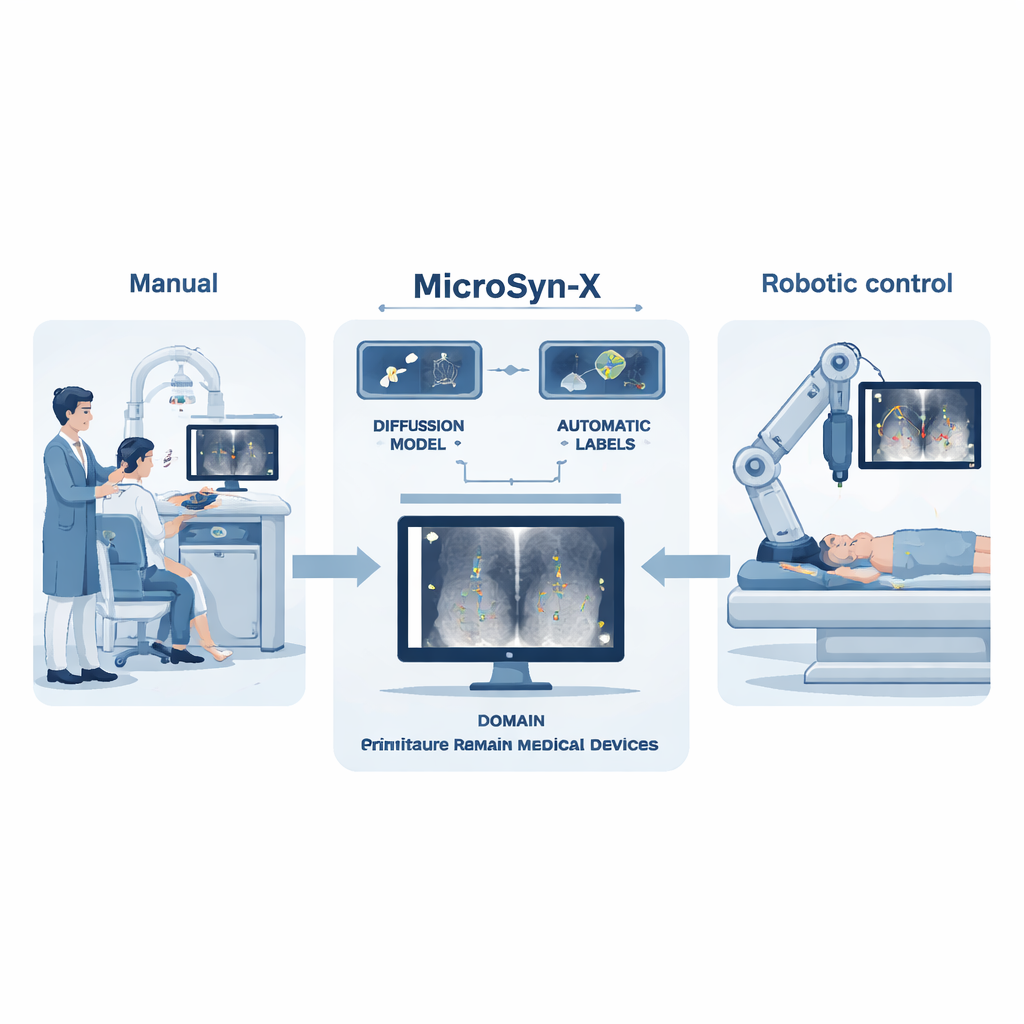
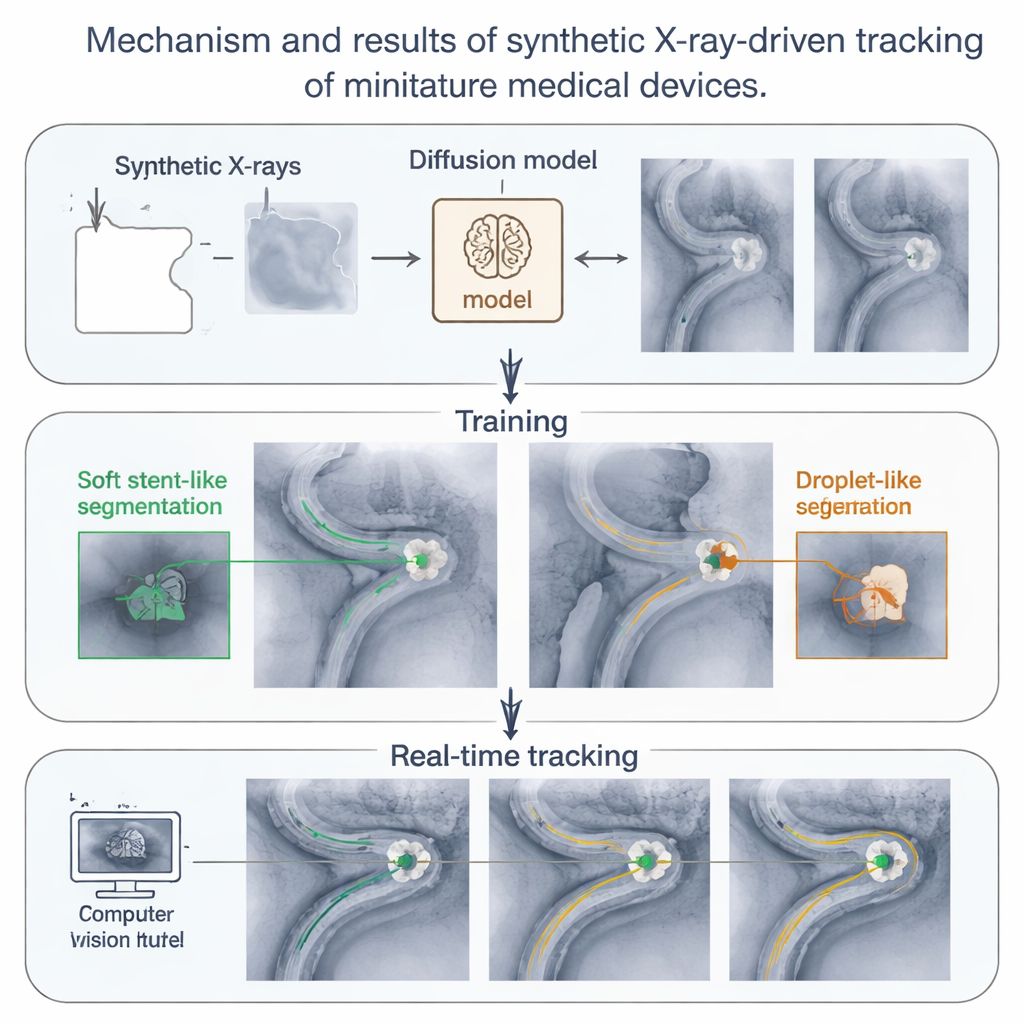
MicroSyn-X решает проблему нехватки данных, создавая собственные высокореалистичные рентгеновские изображения с встроенными метками, которые точно указывают алгоритму обучения, где находится каждое устройство. Сначала система использует современный генератор изображений — диффузионную модель — чтобы создавать правдоподобные фоны рентгенов: органы, кости и хирургические инструменты, управляемые простыми подсказками и грубыми масками, очерчивающими ткани, металл и заполненные жидкостью каналы. Затем изображения миниатюрных устройств — либо сфотографированных один раз на чистом фоне, либо математически смоделированных для жидких капель — цифровым образом встраиваются в эти сцены так, чтобы выглядели так, будто действительно находятся внутри тела. Поскольку компьютер точно знает, где было размещено каждое устройство, он автоматически генерирует точные контуры и ограничивающие рамки, устраняя утомительную ручную разметку.
Подготовка к реальному миру через управляемый хаос
Ключевая инновация MicroSyn-X — «рандомизация домена», сознательное внесение разнообразия в синтетические изображения. Система автоматически изменяет форму органов, позиции устройств, яркость, уровень шума и даже степень сокрытия устройств костями или инструментами. Она также генерирует множество различных форм для жидких роботов, которые могут растягиваться, распадаться на рои и воссоединяться. Сталкивая алгоритм обучения с тысячами слегка различных ситуаций — многими из которых редко или практически невозможно получить от реальных пациентов — авторы обучают модели фокусироваться на существенных визуальных признаках устройств, а не на поверхностных шаблонах. Тесты показывают, что модели, обученные исключительно на таких синтетических изображениях, могут соответствовать или превосходить модели, обученные на реальных рентгенах, особенно в сложных случаях с низким контрастом, высоким уровнем шума или сильным перекрытием.
От компьютерного экрана к роботу в операционной
Исследователи вышли за рамки программных демонстраций и напрямую связали MicroSyn-X с роботизированной системой. Роботизированная рука удерживает сильный магнит рядом с тканью, пока флюороскоп C-дуга снимает рентгеновские изображения. Модель зрения, обученная на MicroSyn-X, обнаруживает мягкие стенты-подобные роботы и жидкие капли в каждом кадре, а алгоритм отслеживания стыкует эти обнаружения в плавные траектории, даже когда устройства кратковременно скрываются за костью. Используя такую обратную связь, робот направляет устройства через закрученные искусственные сосуды, реальные органы животных вне тела и живые артерии у кроликов и крыс. Система успешно управляет несколькими устройствами одновременно, следует за ними по ветвящимся сосудам и контролирует рои жидких капель, которые разделяются и сливаются под магнитным управлением — все в реальном времени в условиях сложной визуализации.
К более умному и менее инвазивному лечению
Проще говоря, эта работа показывает, что компьютеры могут научиться безопасно отслеживать крошечные хирургические инструменты внутри тела, тренируясь на огромных библиотеках тщательно созданных «фальшивых» рентгенов вместо редких реальных. MicroSyn-X превращает синтетическую визуализацию в практичный двигатель для робототехники: он создает реалистичные обучающие данные, обучает модели зрения и передает их вывод в магнитную навигационную систему, которая уже опробована на живых животных. По мере того как эти методы будут совершенствоваться и тестироваться в более сложных случаях, они могут помочь хирургам выполнять деликатные процедуры с большей точностью и меньшей нагрузкой, приближая будущее, в котором флотилии миниатюрных роботов тихо улучшают лечение изнутри.
Цитирование: Wang, C., Kang, W., Sun, M. et al. Synthetic X‑ray‑driven tracking and control of miniature medical devices. Nat Mach Intell 8, 276–291 (2026). https://doi.org/10.1038/s42256-026-01190-3
Ключевые слова: миниатюрные медицинские устройства, рентгеновская визуализация, синтетические данные, медицинская робототехника, компьютерное зрение