Clear Sky Science · ru
Вложенная сеть взаимодействий повышает отзывчивость коллективного поведения
Как стаи животных сохраняют такую острую синхронность
Большие группы животных часто поворачивают, уклоняются или убегают так, будто представляют собой единое существо. В этой статье исследуется, как скрытая структура «кто за кем следует» внутри косяка рыб — и внутри роев роботов, вдохновлённых ими — позволяет всему скоплению реагировать быстро и надёжно при изменении условий.
Слои руководства внутри движущегося стада
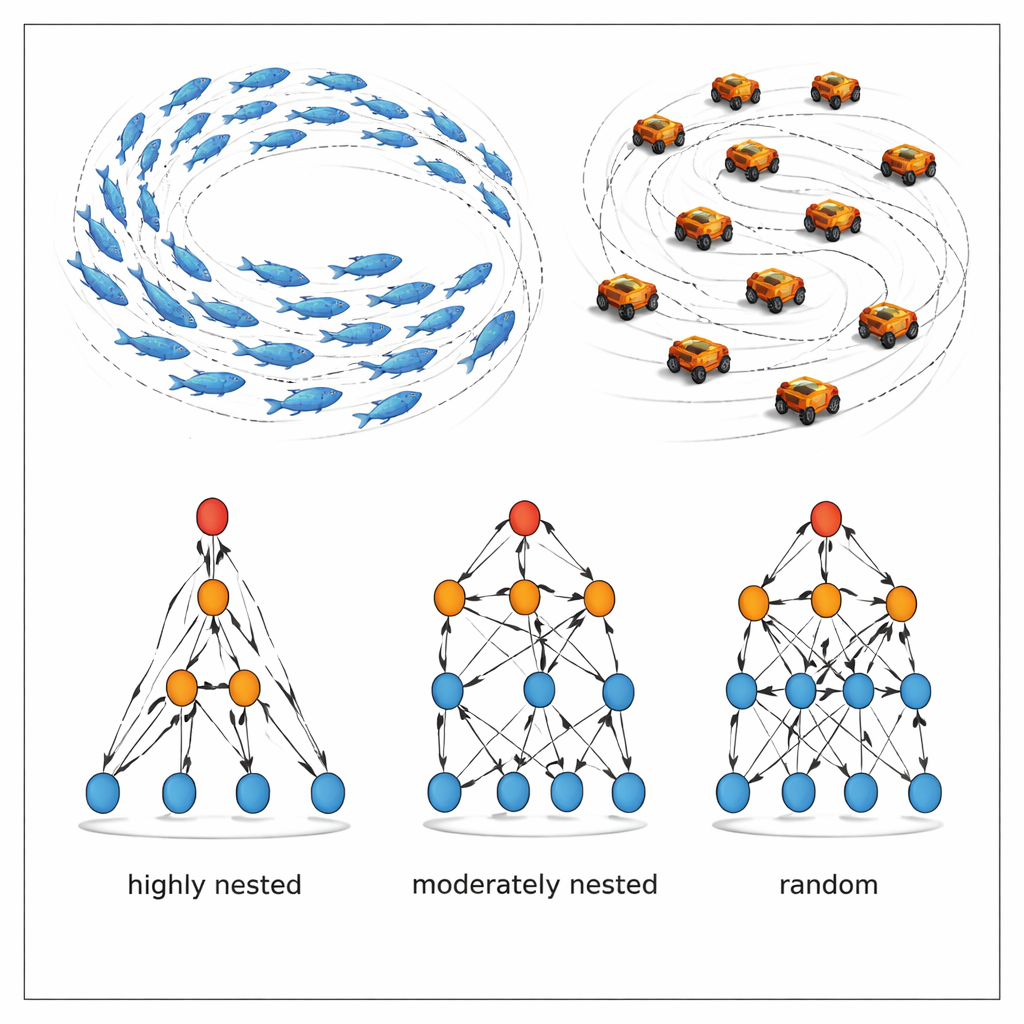
Когда мы наблюдаем, как косяк рыб резко уходит от опасности, возникает соблазн думать, что каждая рыба просто одновременно копирует соседей. Авторы показывают, что реальность тоньше: существует невидимая схема руководства, в которой некоторые рыбы влияют на многих других, а некоторые в основном следуют. Эта схема не является жёсткой иерархией, а представляет собой гибкую сеть связей лидер–последователь, которая меняется в зависимости от типа выполняемого движения. Ключевая структурная особенность, на которой сосредоточены исследователи, называется «вложенностью»: лидеры верхнего уровня направляют не только ближайших последователей, но и косвенно влияют на множество нижестоящих рыб по цепочке.
Что косяки рыб рассказывают о быстрых манёврах
Команда снимала небольшие косяки тетра румми‑носов в мелком круглом аквариуме, отслеживая положение и направление каждой рыбы во времени. По этим траекториям они реконструировали, кто склонен двигаться первым, а кто реагирует позже, построив ориентированную сеть влияния для каждой группы. Они также измеряли, насколько резко косяк поворачивает (кривизна) и насколько плотно выровнены рыбы (поляризация). Выяснилось, что когда группа выполняла быстрые, извилистые манёвры с частыми изменениями направления, подлежащая сеть была сильно вложенной: несколько рыб влияли на многих, и шаблон влияния напоминал аккуратную треугольную каскаду. Напротив, когда косяк плавно двигался в одном направлении, сеть была менее вложенной и более эгалитарной, хотя рыбы оставались хорошо выровненными.
Тестирование потока информации в идеализированных сетях
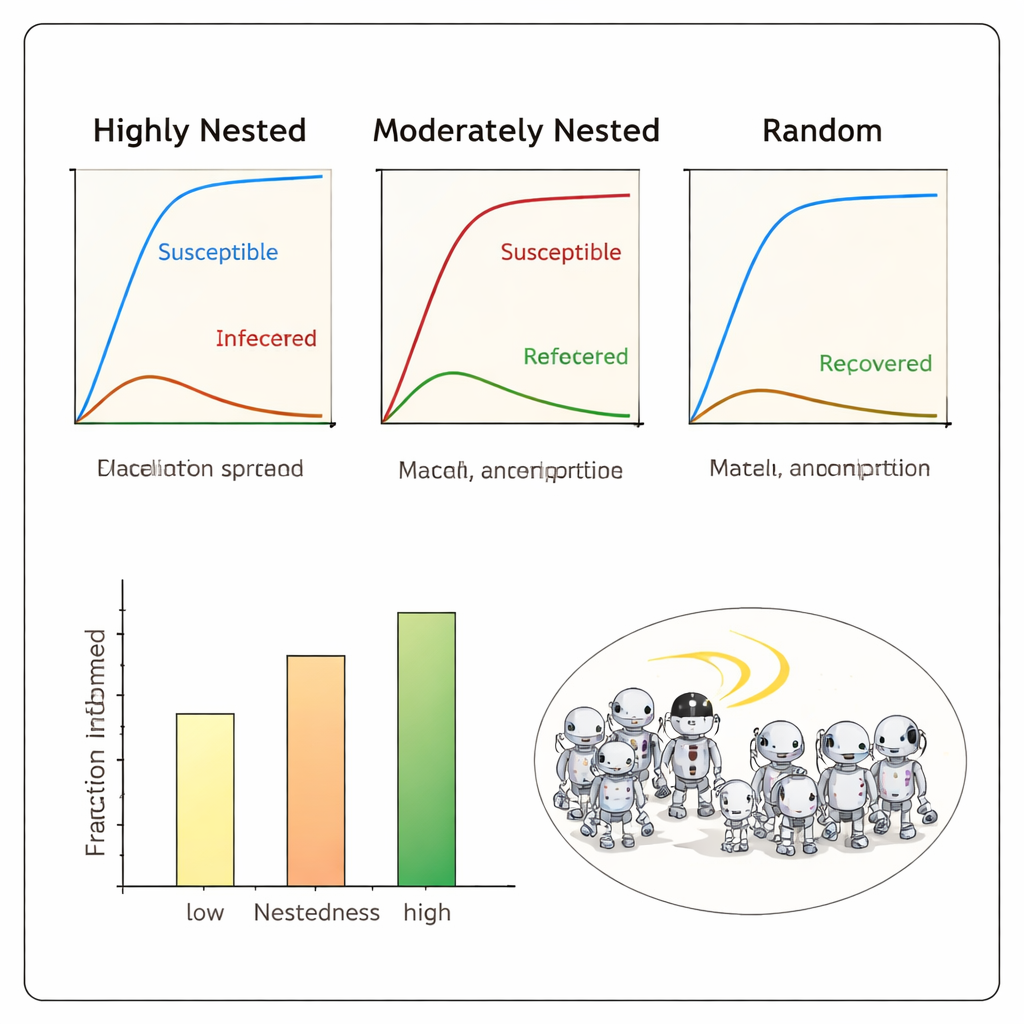
Чтобы понять, почему вложенные структуры могут помогать, авторы обратились к простейшей модели распространения, часто используемой для эпидемий. Здесь «заражение» узла означает, что он получил и передаёт направленный сигнал, а не болезнь. Они сравнили идеально вложенные сети лидер–последователь с частично вложенными и случайными сетями, сохраняя при этом общее число связей неизменным. В наиболее вложенном случае сигнал, запущенный на вершине, быстро достигал почти каждого узла и делал это даже тогда, когда узлы относительно быстро «выздоравливали» (переставали передавать). По мере рандомизации сети и уменьшения вложенности сигнал застревал: многие узлы оставались неосведомлёнными, пик числа активных передатчиков падал, и модели требовалось значительно больше начальных источников сигнала для достижения того же охвата.
От уравнений к поворачивающим роевым роботам
Затем исследование проверило, переносятся ли эти структурные преимущества в реальное движение. Авторы построили модель «самостоятельно движущегося» роя, в которой каждый индивид выбирает, за кем следовать, основываясь на том, насколько выразительным кажется движение соседа, но с оговоркой: правило предпочтительно формирует вложенную иерархию, где более «заметные» движущиеся становятся лидерами для многих других. Они сравнили эту идеально вложенную схему с двумя распространёнными альтернативами: одна, где каждый сосед имеет равный голос, и другая, где влияния взвешиваются плавно по признакам движения. В смоделированных группах, которым требовалось выполнить повторяющиеся большие повороты, командуемые несколькими информированными особями, вложенная схема позволяла толпе точнее следовать заданной траектории и с меньшими задержками, даже при существенном уровне шума в движении.
Настоящие роботы, действующие как косяк рыб
Наконец, исследователи реализовали управление по вложенной сети на пятидесяти небольших колесных роботах, движущихся по ровной арене. В задаче «зависания» одна информированная машина пыталась удерживать группу, кружа вокруг области. При обычном правиле с взвешиванием соседей путь роя был плавным и вялым, показывая лишь мягкие изгибы. При вложенном правиле роботы выполняли более резкие, решительные повороты, тесно отслеживая изменения информированного робота. В задаче «следования», где информированный робот делал непредсказуемые перестановки направления, рой под управлением вложенной схемы вновь оставался ближе и в положении, и по направлению, в то время как сравнительный рой сглаживал или пропускал многие повороты.
Почему это важно за пределами рыб и роботов
Проще говоря, работа показывает: то, как устроена проводка внутри группы, так же важно, как и чувствительность её членов. Сильно вложенная сеть влияния — слоистая цепочка, где лидеры более высокого уровня достигают многих других — позволяет группам реагировать быстрее и надёжнее на важные сигналы, не будучи захлёбанными шумом. Эти выводы могут помочь биологам интерпретировать роевые явления, направлять дизайн команд дронов или подводных роботов, которым нужно быстро действовать в опасных средах, и даже информировать способы организации человеческих сетей, когда необходимы быстрые скоординированные действия.
Цитирование: Zheng, Z., Tao, Y., Xiang, Y. et al. Nested interaction network enhances responsiveness in collective behavior. Commun Phys 9, 75 (2026). https://doi.org/10.1038/s42005-026-02510-0
Ключевые слова: коллективное поведение, косяки рыб, роевые роботы, передача информации, иерархия сети