Clear Sky Science · ru
Объектно-осознанное семантическое картирование с использованием плотностей вероятности для внутренней релокации и планирования путей
Почему важны более «умные» внутренние карты
Когда бытовые и сервисные роботы переходят из лабораторий в реальные квартиры, им нужно уметь больше, чем просто избегать стен и мебели. Чтобы быть по-настоящему полезным, робот должен понимать, что наличие кровати обычно указывает на спальню, а холодильник — на кухню. В этой статье предложен новый способ, позволяющий роботам «видеть» внутренние пространства через объекты, определяющие каждую комнату, что помогает им определять своё местоположение и выбирать маршруты, лучше соответствующие тому, как люди используют своё жильё.
Видеть комнаты через их обычные предметы
Традиционные карты роботов фокусируются либо на чистой геометрии, либо на абстрактных символах. Сеточные карты, построенные по лазерным сканам, фиксируют подробные формы, но становятся тяжёлыми для хранения и медленными при поиске, при этом подталкивая роботов к жёстким, «сеточным» траекториям. Графы высокого уровня, описывающие комнаты и двери, проще в обработке, но отбрасывают мелкие детали, необходимые для точного вождения. Авторы устраняют этот разрыв, организуя карты вокруг комнат и ключевых статичных объектов внутри них — кроватей, диванов, холодильников, столов и т. п. Каждая комната очерчена на плоском плане, и для каждого важного класса объектов выделён свой слой, так что разные виды мебели не затирают друг друга.
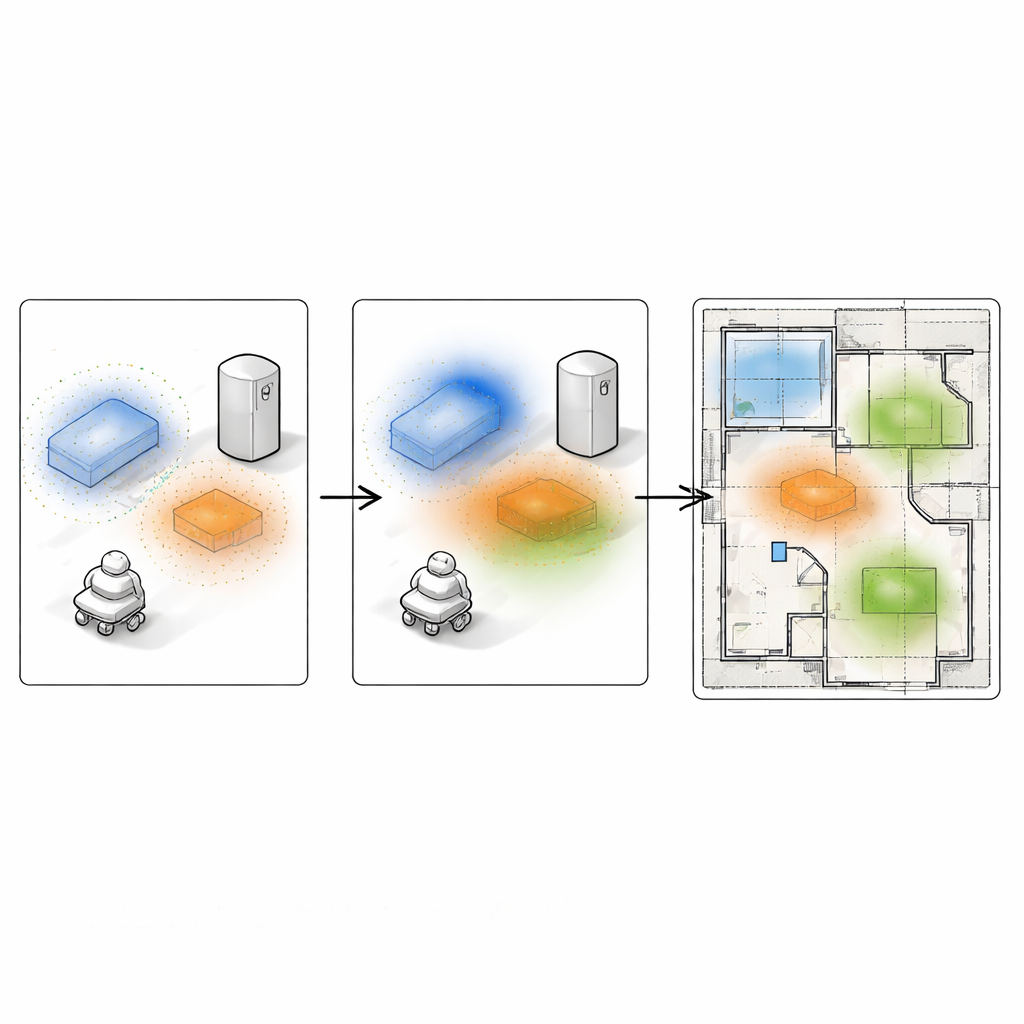
Преобразование мебели в мягкие области вероятности
Вместо того чтобы отображать каждый объект жёстким прямоугольником, метод превращает 3D‑сканы мебели в плавные «тепловые карты» на полу. Робот сначала восстанавливает каждую комнату в 3D с помощью RGB‑D камеры и стандартных инструментов, затем семантически маркирует точки, принадлежащие объектам — стенам, кроватям или стульям. Для каждого типа объектов в комнате находятся кластеры точек и проецируются на пол. На основе этих кластеров система оценивает непрерывную функцию плотности вероятности — мягкое пятно, максимальное там, где объект наиболее вероятен, и плавно убывающее наружу. Накладывая такие пятна по типам объектов, получают компактную, многослойную карту, которая сохраняет и смысл объектов, и их приближённую форму, при этом естественным образом справляясь с шумом и частичными обзорами.
Помощь роботам в повторном определении своего положения
Одно из главных применений такой объектно-центрированной карты — помощь роботу в локализации, когда он не знает, где находится на плане — распространённая проблема при первом запуске или после перемещения. Робот делает новый снимок глубины, обнаруживает видимые объекты и строит собственный небольшой набор вероятностных пятен для этой частичной сцены. Затем эволюционный алгоритм поиска исследует множество возможных поз робота по всей карте здания. Для каждой кандидатной позы локальные пятна накладываются на глобальную карту, и их сходство измеряется с помощью статистического расстояния. Границы комнат и проверки прямой видимости отбрасывают невозможные позы, например вид холодильника через стену. В ходе многих поколений популяция кандидатных поз эволюционирует к положению, где наблюдаемые объекты лучше всего соответствуют сохранённым полям плотности, обеспечивая надёжную оценку положения и ориентации робота.
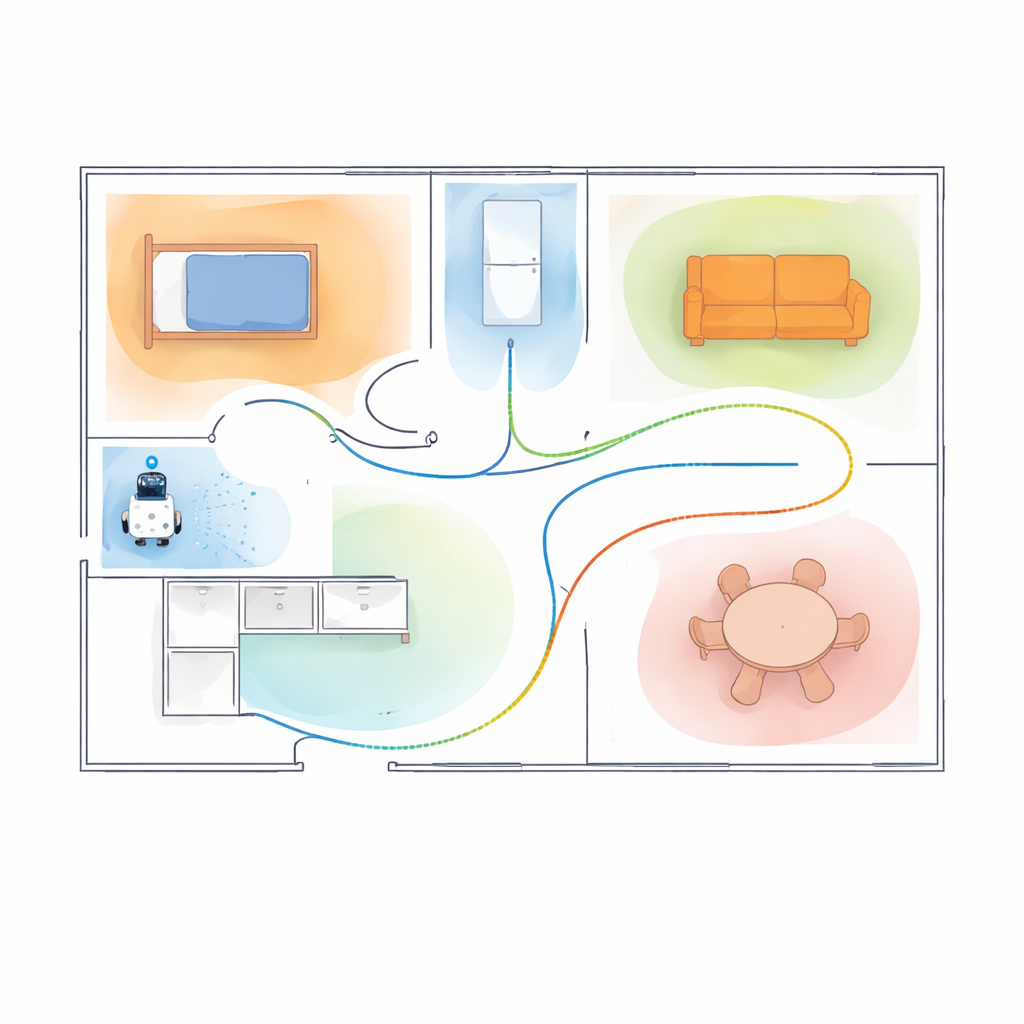
Планирование маршрутов с учётом того, как люди используют пространство
Та же карта управляет и движением робота. Поскольку каждый тип объекта представлен как гладкое поле влияния, роботу можно задать предпочтения — избегать или, наоборот, стремиться к определённым областям — путём настройки числовых весов. Кровати могут стать зонами, которых следует избегать ночью, а столы — притягивать при поиске предметов. Эти семантические предпочтения комбинируются со стандартной картой препятствий и запасом безопасности вдоль стен, образуя единую «стоимостную поверхность» по плану помещения. Классический планировщик пути находит маршруты, которые не только свободны от коллизий, но и соответствуют желаемым социальным или задачным приоритетам. Эксперименты на реалистичном наборе данных и в настоящей меблированной квартире показывают, что такие семантически смещённые маршруты лучше соответствуют заданным предпочтениям, иногда ценой незначительного увеличения длины пути, и могут быть более плавными в реальных домах.
Что это значит для повседневных роботов
Проще говоря, эта работа учит роботов воспринимать дома так же, как люди: как комнаты, определяемые мебелью, а не просто пустые коробки со стенами. Обернув каждый ключевой объект в мягкое вероятностное облако, единая компактная карта может поддерживать как «Где я?», так и «Как мне туда добраться?» без необходимости в отдельных моделях для каждой задачи. Тесты показывают, что такой подход помогает роботам надёжнее локализоваться в захламлённых или похожих друг на друга комнатах и выбирать маршруты, которые лучше соответствуют человеческим ожиданиям. По мере развития этих идей будущие домашние роботы могут передвигаться более вежливо и интеллектуально, взаимодействуя с нашими пространствами с ощущением, намного меньшим по механистичности.
Цитирование: Mora, A., Mendez, A., Moreno, L. et al. Object-aware semantic mapping using probability density functions for indoor relocalization and path planning. Sci Rep 16, 9450 (2026). https://doi.org/10.1038/s41598-026-40498-3
Ключевые слова: локализация робота в помещениях, семантическое картирование, навигация с учётом объектов, вероятностные карты для роботов, планирование маршрута