Clear Sky Science · ru
Глубокая вероятностная проходимость с адаптацией во время работы для навигации планетарных роверов с учётом неопределённости
Почему важно безопаснее водить ровер
Когда мы отправляем колёсных роботов на Луну или Марс, им приходится ехать по песку, камням и склонам без помощи человека. Одна неверная оценка мягкости почвы может навсегда оставить ровер стоимостью в миллиарды долларов застрявшим, как это случилось с ровером NASA Opportunity, застрявшим в рябном песке на недели. В этом исследовании предложен новый способ, который позволяет роверам «чувствовать» рискованность участка дороги впереди, выбирать более безопасные маршруты и даже учиться на собственных ошибках в процессе движения.
Мягкая почва как скрытая угроза
На других планетах самыми опасными препятствиями нередко бывают не валуны или утёсы, которые камеры видят легко, а обманчиво ровные участки рыхлого грунта. Когда колёса ровера пробуксовывают в такой почве, машина соскальзывает, продвигается намного медленнее, чем задано, тратит энергию и может навсегда лишиться подвижности. Традиционные системы навигации в основном ориентируются на видимые геометрические опасности — что выглядит как препятствие, а что нет — и не всегда учитывают, как грунт поведёт себя под колёсами. В то же время методы машинного обучения, пытающиеся предсказывать пробуксовку по изображениям и 3D‑картам, могут ошибаться в непривычных условиях, например при ином освещении или на более крутых склонах, и обычно не сообщают, насколько неопределённы их предсказания.
Обучение ровера рассуждать о риске
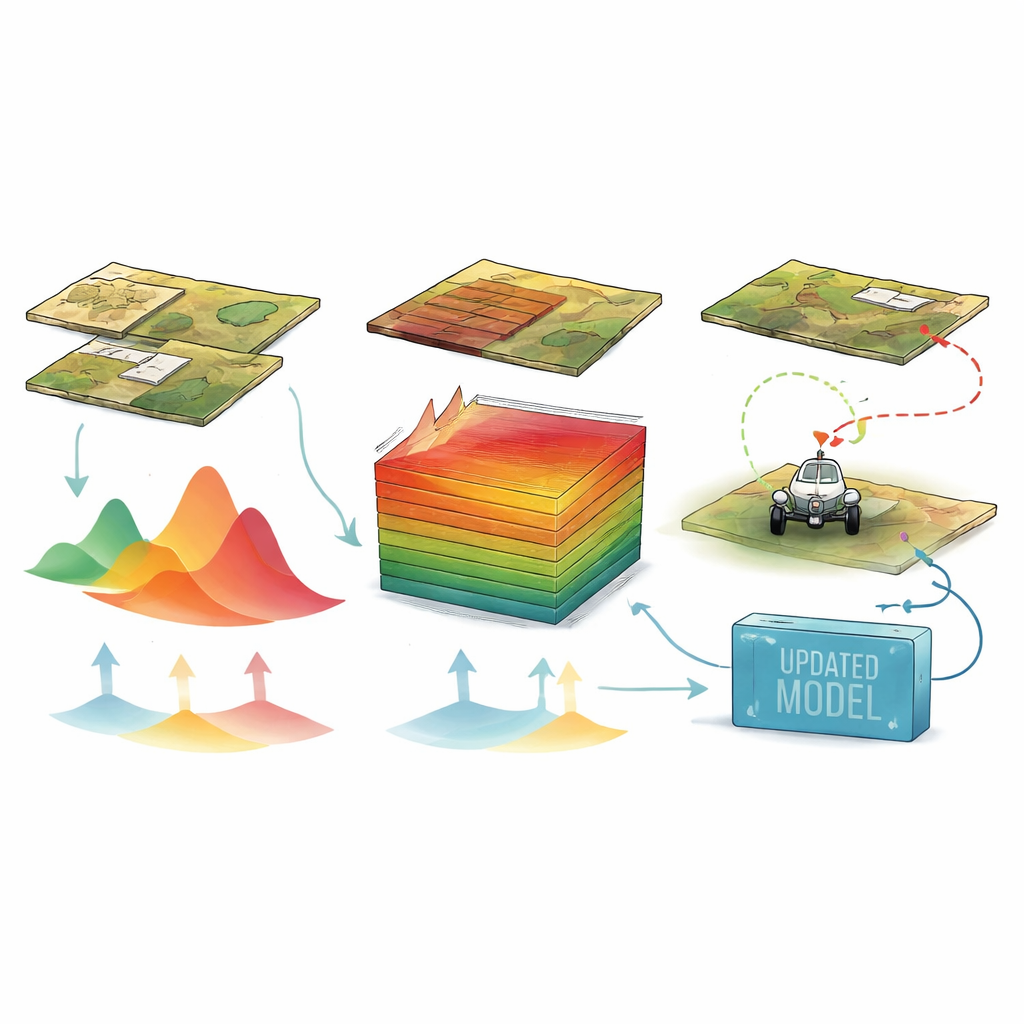
Авторы предлагают интегрированную систему обучения и планирования, которую они называют глубокой вероятностной проходимостью. Вместо выдачи единственной «лучшей оценки» того, насколько будут пробуксовывать колёса на каждом участке, их модель предсказывает полное вероятностное распределение возможной пробуксовки на основе цветных изображений и локального уклона. Ансамбль глубоких нейронных сетей смотрит на ландшафт сверху и для каждого возможного перемещения по сетке выдаёт как ожидаемое значение пробуксовки, так и меру его неопределённости. Исходя из этого распределения, система переводит пробуксовку в эффективную скорость движения и, в конечном счёте, в стоимость времени для каждого шага. Участки, где ровер с большой вероятностью может застрять, получают очень высокие стоимости; участки с благоприятным и уверенным предсказанием получают низкие стоимости. Затем стандартный алгоритм поиска пути находит маршрут, балансирующий между короткой дистанцией и низким риском потери подвижности.
Позволить роверу учиться в движении
Ключевая проблема в планетарных исследованиях заключается в том, что условия, с которыми сталкивается ровер по прибытии, могут сильно отличаться от данных, на которых он обучался: уклоны могут быть круче, свойства почвы незнакомыми, а освещение — совсем иным. Для решения этой задачи в систему встроен механизм адаптации во время работы. Пока ровер едет, он измеряет реальную пробуксовку. После каждого короткого перемещения эти свежие измерения используются для бережной корректировки добавленных слоёв «масштаб и сдвиг» в нейросетях при фиксированных исходных весах. Такая стратегия позволяет модели быстро адаптироваться к новым типам грунта, используя лишь небольшое число наблюдений, при этом сохраняя ранее накопленные знания о знакомых условиях. Обновлённые предсказания затем возвращаются в планирование, чтобы выбранный маршрут мог улучшаться на ходу.
Испытания системы в жёстких условиях
Поскольку реальные данные роверов охватывают лишь ограниченный набор типов местности, команда создала большой синтетический набор данных марсианоподобных ландшафтов. Они сочетали компьютерно‑сгенерированную грубую топографию с десятью скрытыми классами грунта, у каждого из которых были свои цветовые и свойства пробуксовки, и варьировали как крутизну склонов, так и направление освещения, чтобы создать знакомые и незнакомые сценарии. В тысячах смоделированных миссий новый метод сравнивали с двумя современными планировщиками, которые либо игнорируют неопределённость, либо используют её менее прямо. В знакомых условиях все подходы показывали сопоставимые результаты. Но в самых сложных случаях — при тёмном освещении и крутой, кратероподобной местности — подход глубокой вероятностной проходимости обеспечил более высокие показатели успеха и меньшую максимальную пробуксовку, сохраняя конкурентные времена в пути. При включённой адаптации на ходу система ещё сильнее снизила ошибки предсказаний и повысила безопасность, особенно в средах, сильно отличавшихся от обучающих данных.
Что это означает для будущих миссий
Для широкого читателя ключевая идея состоит в том, что работа даёт планетарным роверам более осторожный и самосознающий способ передвижения по опасной местности. Вместо слепого доверия одному предсказанию о сцеплении колёс, ровер теперь может оценивать и ожидаемое поведение, и степень неопределённости, выбирая маршруты, которые быстры, но вряд ли оставят его в ловушке. Непрерывно обучаясь на собственном опыте пробуксовки, он способен приспосабливаться к новым типам песка, уклонам и освещению без внешней помощи. По мере того как космические агентства планируют более длительные и амбициозные наземные миссии, такая навигация с учётом неопределённости может помочь ценным роботам проводить больше времени за изучением новых научных целей и меньше — за выкапыванием себя из проблем.
Цитирование: Endo, M., Taniai, T. & Ishigami, G. Deep probabilistic traversability with test-time adaptation for uncertainty-aware planetary rover navigation. Sci Rep 16, 9499 (2026). https://doi.org/10.1038/s41598-026-40109-1
Ключевые слова: навигация планетарных роверов, проходимость местности, планирование с учётом неопределённости, машинное обучение в робототехнике, автономное исследование