Clear Sky Science · ru
InFoRM: единая обратная и прямая модель для сенсомоторного управления
Как мозг может упрощать движение
Каждый раз, когда вы тянетесь за кружкой или стучите по клавиатуре, мозгу нужно преобразовать намерение ("двинуть руку туда") в точную мышечную активность и одновременно предсказать, как это движение будет ощущаться. Классические теории полагают, что мозг использует два отдельных внутренних «калькулятора» для этой работы: один генерирует команды мышцам, другой предсказывает приходящую сенсорную информацию. В этом исследовании рассмотрена смелая альтернатива: единая, унифицированная цепь может выполнять обе задачи — экономя энергию и повышая эффективность.
Два способа мысли о контроле
Традиционные модели контроля движения представляют себе разделённую систему. «Обратная» часть преобразует желаемый результат (например, траекторию кончика пальца в пространстве) в необходимые мышечные активации, тогда как «прямая» часть предсказывает, как тело будет двигаться и какой сенсорный отзыв появится. Эти два элемента часто изображают в виде отдельных блоков в учебниках. Однако данные нейровизуализации и результаты при поражениях мозга не подтверждают такую четкую границу, и некоторые участки мозга, похоже, задействованы в обеих ролях. Кроме того, поддержание двух сложных цепей может быть метаболически затратным. Авторы потому задаются вопросом, может ли одна гибкая сеть научиться производить моторные команды, предсказывать сенсорную обратную связь и даже восстанавливать исходную цель, опираясь лишь на внутренние сигналы.
Одна сеть, которая делает всё
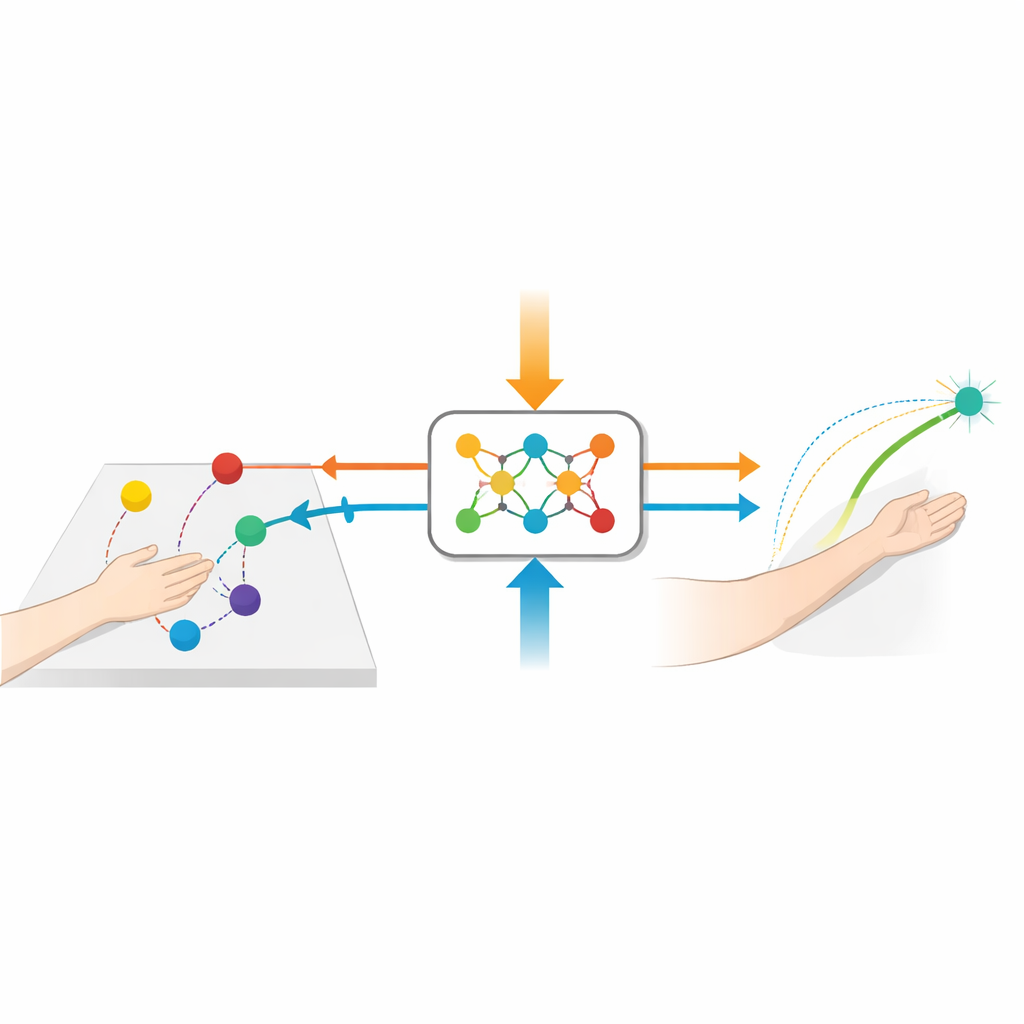
Чтобы проверить эту идею, исследователи построили вычислительную модель под названием InFoRM (сокращение от inverse–forward–recognition model). Вместо двух стековых модулей InFoRM использует одну рекуррентную нейронную сеть — сеть взаимосвязанных узлов — в которую поступают сигналы о цели, мышцах и ощущениях. Из этого общего «резервуара» активности параллельно обучаются три считывающих выхода: один восстанавливает желаемую траекторию руки, другой генерирует мышечные активации, необходимые для её выполнения, а третий предсказывает сенсорные сигналы (длину и скорость мышц), которые последуют. Существенно, что одни и те же внутренние динамики поддерживают все три задачи одновременно, поэтому модель может разделять информацию между ними, а не учить каждую по отдельности.
Тест модели в реальных условиях
Команда записала реальные движения руки добровольцев, которые ритмично тянулись из центральной точки к мишеням, расположенным в разных направлениях и на разных расстояниях на столе. Данные захвата движения и подробная мышечно-скелетная модель предоставили для каждого движения траекторию кончика пальца, оценённые мышечные активации и соответствующие сенсорно-подобные сигналы от мышц. InFoRM обучали на подмножестве направлений, а затем тестировали в нескольких сложных сценариях: повторение выученных движений, выполнение движений в новых промежуточных направлениях ("морфинг" между увиденным), а также обработка естественных, самостоятельно выбираемых переходов между целями. Для сравнения авторы также построили более классические архитектуры управления с отдельными обратной и прямой сетями, а также усовершенствованные варианты, которым давали дополнительную входную информацию.

Более точные предсказания при меньших ресурсах
Во всех испытаниях единая сеть InFoRM точнее воспроизводила записанные движения и мышечные сигналы по сравнению с любыми раздельными архитектурами. Её выходы ближе следовали истинным сигналам и имели меньшие ошибки, даже при интерполяции на нетренированные направления или при работе с реалистичными, незаученными последовательностями мишеней. Важно, что InFoRM достигала этой более высокой точности, используя сопоставимое или меньшее количество нейронов и требуя значительно меньше итераций обучения, что указывает на лучшую вычислительную эффективность. Тот факт, что модель также превосходила лучший расширенный контрольный вариант — тот, который имел доступ к той же комбинации информации о цели, моторах и сенсорике — говорит о том, что преимущество исходит из интеграции всего в одной рекуррентной цепи, а не только из более богатых входов.
Что это означает для понимания мозга
Результаты поддерживают идею о том, что мозг может не поддерживать чётко разделённые «прямые» и «обратные» механизмы движения. Вместо этого единая, богато связанная цепь может неявно содержать оба: моторные команды и предсказания возникают из одних и тех же фундаментальных динамик. Такая перспектива хорошо сочетается с современными представлениями о мозге как предсказательной машине, постоянно генерирующей и обновляющей ожидания о собственном теле и мире. Хотя модель остаётся упрощённой абстракцией, и биологические детали, такие как нервные задержки и меняющиеся синапсы, ещё предстоит изучить, InFoRM демонстрирует, что единая конструкция может быть одновременно мощной и экономной, предлагая убедительную альтернативу в представлении о том, как нервная система контролирует движение.
Цитирование: de Graaf, M.L., Kloock, L., Schwarze, A. et al. InFoRM: a unified inverse and forward model for sensorimotor control. Sci Rep 16, 8490 (2026). https://doi.org/10.1038/s41598-026-39944-z
Ключевые слова: сенсомоторное управление, внутренние модели, нейронные сети, обучение моторике, предиктивная обработка